X波段双极化相控阵天气雷达金属球定标技术
2022-01-07 07:01:42雷卫延路永平王明辉周嘉健甘泉
广东气象 2021年6期
雷卫延,路永平,王明辉,周嘉健,甘泉
(1.惠州市气象局,广东惠州 516003;2.广东省气象探测数据中心,广东广州 510080)
目前粤港澳大湾区已建成由25部X波段双极化相控阵天气雷达组成的灾害性天气精细化监测网,时空分辨率分别达到1 min和30 m,可有效弥补S波段天气雷达对局地中小尺度强对流天气监测的不足,在防御暴雨、雷雨大风、冰雹等发挥了积极作用,为防灾减灾争取了更多的时间。但目前对X波段双极化相控阵雷达尚未健全定标技术规范,偏振量数据质量难以保障,因此迫切需要开展相控阵雷达定标试验,研究能满足业务要求的定标技术,尽早投入业务使用,发挥雷达效益最大化。国外研究人员Sachidananda等[1]于1985年提出Zdr测量精度不应低于0.2 dB,理想精度最好是0.1 dB;Ryzhkov等[2]于2005年的研究结果表明,0.2 dB的Zdr偏差将导致雷达利用Zdr进行降水估测产生18%的误差,高精度探测是成功实现双极化雷达气象应用的前提;李斐斐等[3]、胡东明等[4]研究分析了双线偏振天气雷达双通道一致性测试及标校方法;刘黎平等[5]、汪旭东等[6]、程张凡等[7]对X波段相控阵天气雷达测试定标方法开展了一定研究;李兆明等[8]对使用金属球定标X波段固态天气雷达开展研究,取得初步结论。
目前国内外双极化雷达定标方法主要有太阳法、金属球法、小雨法、信号源法等,业务中使用的S波段双极化雷达具有完善的自动定标系统和技术规范[9-10],由于X波段双极化相控阵天气雷达近几年才投入使用,相对而言国内外对其定标研究文献较少,本研究利用无人机悬挂金属球开展双通道强度一致性定标研究,试验结果表明:使用无人机悬挂金属球定标方法切实可行,能够满足技术规范要求。
1 金属球定标原理
雷达定标用的金属球(图1)对电磁波的散射是向空间各个方向传播,后向散射截面与波长的关系是已知的,其半径大小的选取与雷达波长有关,使后向散射位于几何光学散射区域,即后向散射截面仅取决于金属球半径[6]。

图1 雷达定标用金属球

根据天气雷达方程,对于已知雷达目标,回波强度可采用公式(1)计算。其中,Pr为回波信号功率(W);Pt为雷达发射脉冲功率(W);R为回波距离(m);λ为雷达工作波长(m);G为天线增益;Gr为接收通道增益;σ为目标的雷达反射截面积RCS(m2)。金属球作为探测目标引起的差分反射率Zdr理论上为零值,因此使用金属球定标雷达实测Zdr值,即为雷达差分反射率系统误差,检验系统误差是否满足<0.2 dB的指标要求。如果超出指标范围,利用参数订正使雷达Zdr小于0.2 dB,实现雷达从发射、接收、数据处理等全链路的系统定标,确保雷达观测数据质量。
2 无人机飞行轨迹设计
相控阵雷达的主瓣方向即3 dB波束宽度在垂直剖面上对应一个椭圆区域,借助无人机上的定位设备,通过控制无人机使所携带的金属球大致处于上述椭圆区域,由于雷达的目标定位和无人机的位置定位有一定的误差[11],需要移动金属球扫描一段区域,雷达观测到金属球反射信号的最大值时金属球所在的位置[12],即刚好处于雷达主瓣方向,并以该位置作为基准点设计无人机飞行轨迹,如图2所示。
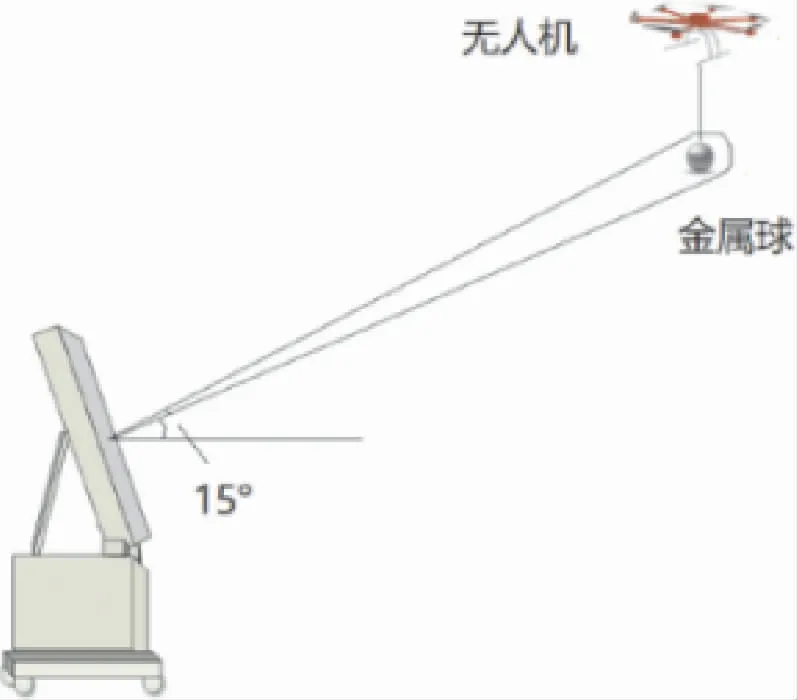
图2 无人机金属球定标示意图
雷达定标使用宽度为1μs的雷达短脉冲,考虑到雷达观测盲区约为200 m,定标时应避开雷达盲区,标定时金属球距雷达天线选择300 m左右为宜。当雷达发射波束衰减25 dB时,主瓣宽度为±2°,第一旁瓣宽度为±2.6°,利用三角关系计算得到第一旁瓣距离雷达法线约13.6 m。为减少无人机对定标的影响,利用20 m的系留细绳悬挂金属球,使无人机远离雷达第一旁瓣,此时无人机的影响可以忽略不计。无人机带动金属球以基准点为中心在12 m×12 m正方形范围内呈方波运动,以5个等间距运动为一个循环,最后一次上升到顶部后不做水平移动,原路下降重新回到最左面第一个起点位置,以此类推每个运动周期约90 s,金属球运动轨迹示意图如图3所示。

图3 金属球运动轨迹
3 定标实施方案
选择无风或小风的天气开展金属球定标,以减少金属球剧烈运动对定标的影响。按照雷达正常业务观测模式,按照第2章无人机飞行轨迹策略,每个体扫周期90 s雷达共采样7 200个点,每个采样点包含32个脉冲累计。
雷达水平和垂直收发通道的阻抗均为固定值,因此回波功率可以通过电压信号来反算,二者一一对应,成正比关系。如图4所示,纵坐标代表电压信号,横坐标代表采用点数,当金属球做垂直运动时,上升和下降会穿过雷达主波束中心,电压信号先增加后减小,产生①、③、⑤、⑦峰值功率极大值;图形中两个方波的宽度代表金属球在两个垂直运动之间的平移,由于远离主波束中心此时产生②、④、⑥功率极小值;最后一个上升和下降是原路径,无水平移动,所以两个峰值⑨、○1间距较近。
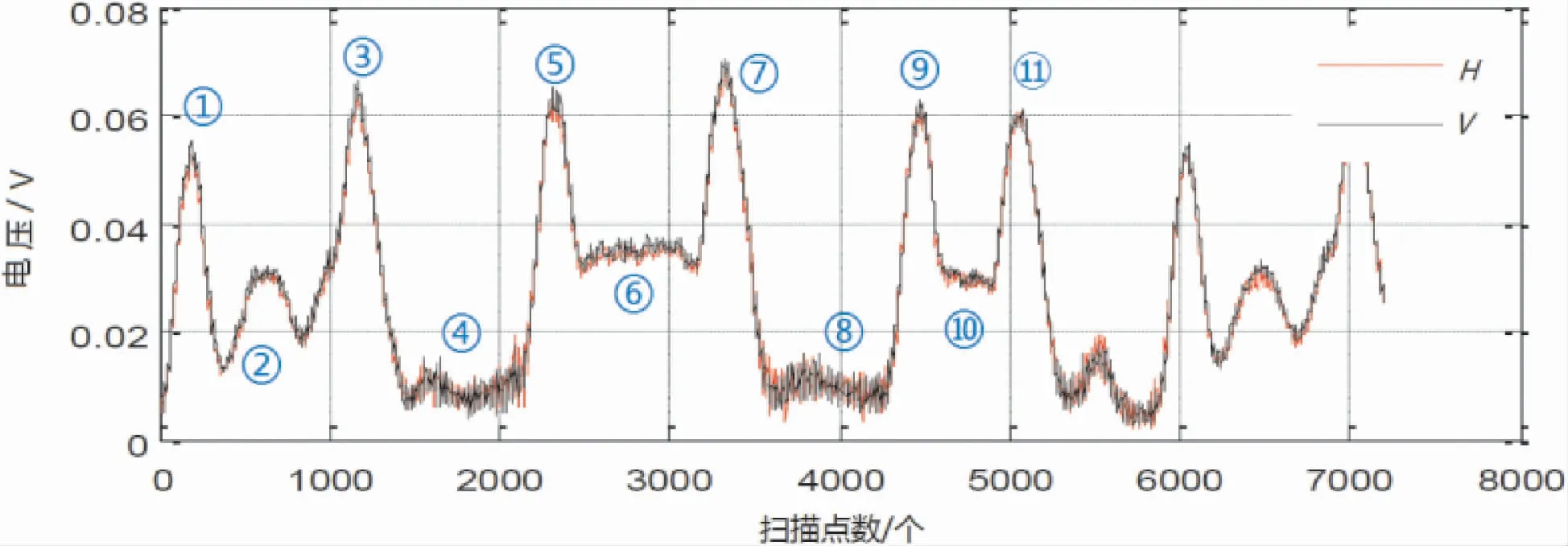
图4 实测电压信号最大值曲线
当金属球经过雷达主波束中心时,电压大于特定阈值0.05 V为有效数据,分别计算水平和垂直通道所有有效数据的平均值,以此计算差分反射率Zdr。针对水平和垂直回波信号功率计算公式(1),回波距离可以通过无人机的定位系统计算出来,综合考虑雷达盲区和无人机承载因素,金属球到雷达天线阵面中心的距离应大于200 m,但又不易太远;雷达的工作波长、天线增益在出厂前已经过测试,为已知量;雷达观测目标金属球直径选定为13.8 cm,金属球的RCS与极化方式无关,可采用公式(2)计算。其中,r为金属球的半径(m)。由此计算得知定标用的金属球的RCS为0.015 m2。

4 定标过程
2020年1—10月在广州多次开展金属球定标试验,试验数据如表1所示。
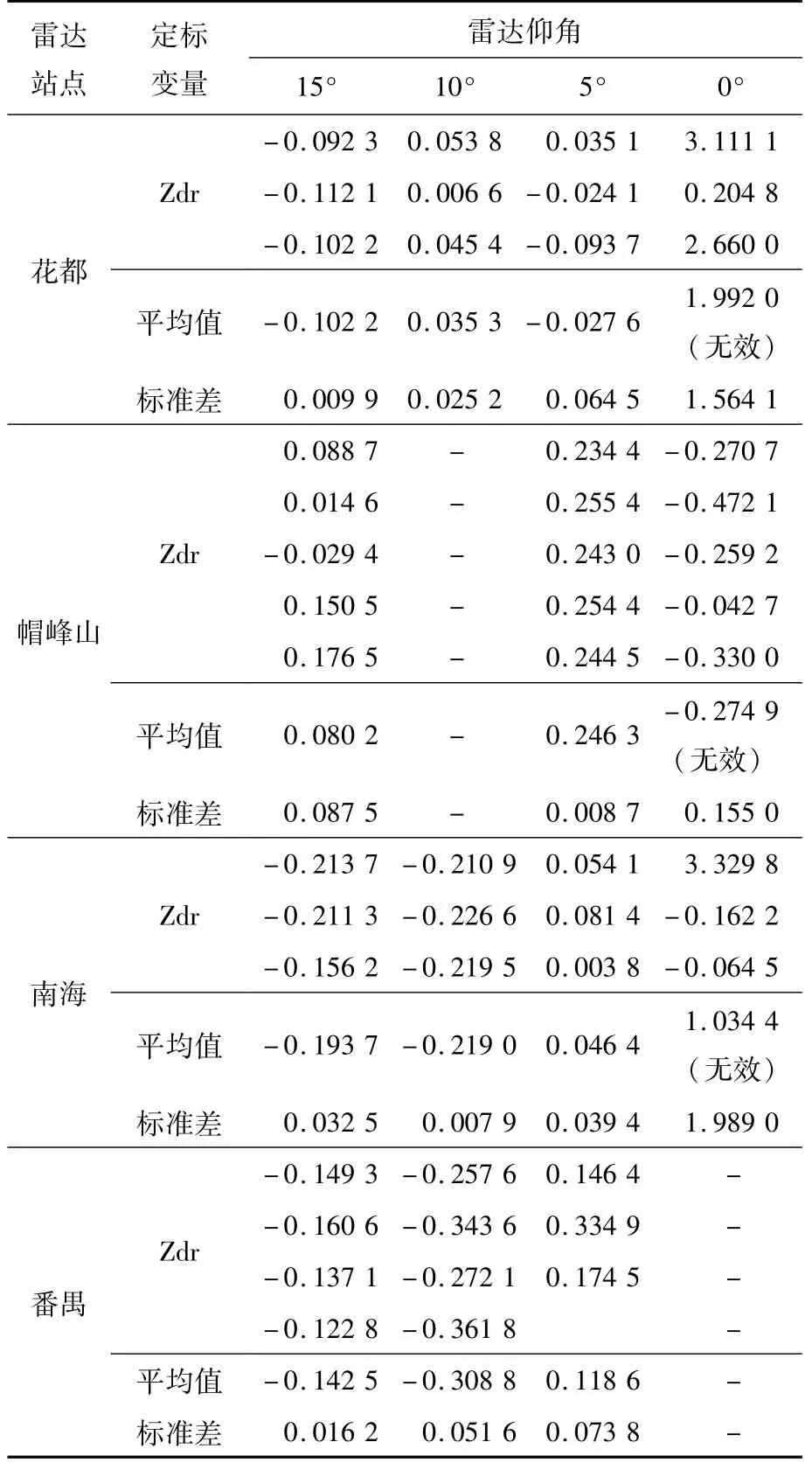
表1 金属球定标试验结果 dB
定标方法:首先不升空金属球,雷达依次选定0°、5°、10°、15°仰角对空气进行360°扫描,测试周围环境噪声和地物杂波情况;其次选择不受外界干扰的方向,按照无人机预先设定飞行策略,金属球距雷达天线约300 m的位置,依次对不同仰角开展定标。如表1所示,在1—10月开展的多次定标过程中花都、帽峰山、南海3部雷达在仰角为0°方向上存在遮挡,数据跳跃比较大,定标数据不可信;而花都、帽峰山、南海、番禺4部雷达在仰角为5°、10°、15°方向上无外界干扰,Zdr平均值均表现稳定,波动范围<0.2 dB,标准差均满足<0.1指标要求。
根据表1可知番禺雷达10°仰角Zdr平均值为-0.308 8 dB,超出<0.2 dB的指标要求。一次雷达金属定标过程如下,修正前Zdr值偏差为-0.54 dB,分布如图5a所示;经过参数修正再次进行定标Zdr值偏差为-0.072 dB,分布如图5b所示,表明通过金属球定标法能够使雷达Zdr指标满足业务规范要求。
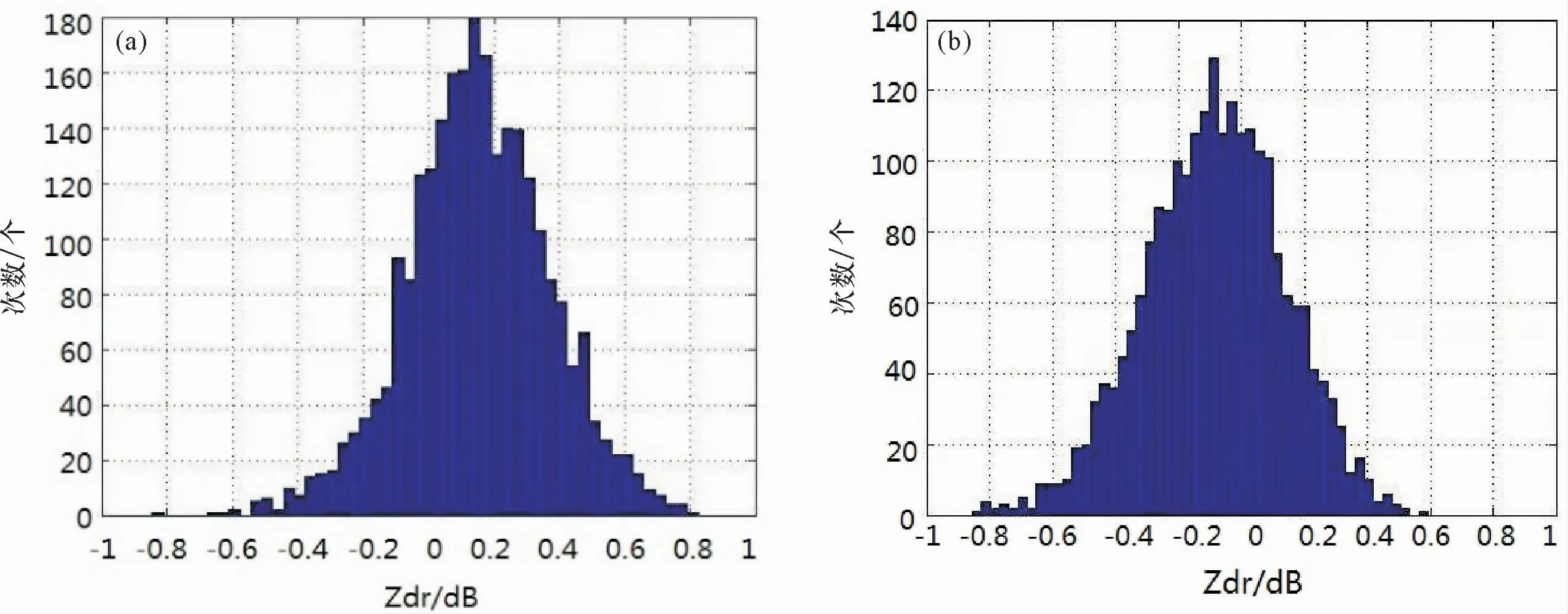
图5 修正前(a)和修正后(b)Zdr概率分布
5 结论
通过开展X波段双极化相控阵天气雷达金属球定标试验,对天线、发射通道、接收通道、数据处理等全链路一致性进行测试分析,对不同的仰角进行定标,对超出指标要求的仰角进行修正,得到如下结论:
1)开展金属球定标时,应选择无风或小风的天气进行,每个仰角均应选择无环境噪声和地物杂波干扰的方位作为测试方向。
2)对广州4部雷达现场定标试验进行分析,0°仰角容易受到地物干扰,数据波动大,定标结果不符合要求,金属球定标存在一定的弊端。对5°、10°、15°等仰角开展金属球定标,Zdr标准差均小于0.1 dB,波动范围均小于0.2 dB,表明定标结论可信,超出指标的仰角经过参数修正,Zdr平均值均能满足<0.2 dB的指标要求。
从定标结果来看,绝大多数雷达定标结果都能满足指标要求,仅个别雷达的某个仰角超出误差范围,建议每年开展一次金属球定标业务。
猜你喜欢
今日农业(2021年19期)2022-01-12 06:17:00
煤气与热力(2021年3期)2021-06-09 06:16:16
化工管理(2021年7期)2021-05-13 00:45:20
空间科学学报(2020年1期)2021-01-14 00:53:20
初中生世界·九年级(2020年2期)2020-04-10 06:47:22
电子制作(2019年24期)2019-02-23 13:22:16
电子测试(2018年15期)2018-09-26 06:01:46
成都信息工程大学学报(2017年6期)2017-03-16 03:04:30
科技视界(2016年15期)2016-06-30 12:48:10
中国光学(2015年5期)2015-12-09 09:00:46