
桥梁检测轻质长臂机器人的设计与研究*
2022-01-06 06:35杜文龙景凤仁王洪光
机械制造 2021年12期
□ 常 勇 □ 杜文龙 □ 景凤仁 □ 王洪光
1.中国科学院沈阳自动化研究所机器人学国家重点实验室 沈阳 110016 2.中国科学院机器人与智能制造创新研究院 沈阳 110016 3.沈阳工业大学 机械工程学院 沈阳 110016
1 研究背景
桥梁是交通设施互联互通的关键节点和枢纽工程,是国民经济发展和社会安全的重要保障[1]。桥梁发生垮塌事故,不仅会危及人民生命安全,造成巨大经济损失,而且会使社会产生极大恐慌情绪。研究表明,90%的混凝土桥梁坍塌都与桥梁裂缝有关[2-3]。桥梁裂缝是桥梁安全体系中的一个重要病害问题。桥梁表面出现裂缝,表明桥梁已经处于亚健康状态,若不进行及时修补,将会导致桥梁内部钢筋水泥产生侵蚀腐化,最终可能酿成重大桥梁安全事故。
桥梁裂缝是评价桥梁健康状况的主要指标之一,对桥梁裂缝进行检测和分析,对于桥梁的养护而言具有非常重要的意义[4]。
目前对高墩、大厚度、宽幅大型桥梁进行裂缝检测,主要采用人工作业方式,由重型桁架式或臂架吊篮式桥梁检测工程车在桥面上开展作业,检测人员通过吊篮传送或桁架通道到达主梁底部壁面处,手持检测工具对桥梁进行检测。这种传统检测方法的缺点是作业人员劳动强度大、危险性高、检测效率低,并且桥梁检测工程车体积大,影响交通,使用不便。近年来,国内外开发出通过臂架式桥梁检测工程车末端搭载小型机械臂的桥梁检测装备[5-7],这类设备多由两套机械臂系统构成,关节自由度多,控制复杂,作业效率低。另一方面,由于前端仍为臂架式桥梁检测工程车,占地面积大,影响交通。
为实现对高墩、大厚度、宽幅大型桥梁的快速、便捷检测,笔者设计了一种桥梁检测轻质长臂机器人。基于作业空间分析,设计合理的机构构型和连杆结构,实现机器人的轻质化。在建立运动学模型的基础上,规划机器人的运动,实现对主梁底部侧壁和边缘的检测。笔者设计的重点在于完成机器人的机构设计,基于运动学模型实现检测任务运动规划,为最终机器人的作业提供技术支撑。
2 检测作业空间
笔者设计的桥梁检测轻质长臂机器人主要应用背景为杭州湾大桥引桥段主梁侧壁检测,主梁主体结构尺寸如图1所示。机器人长臂末端目标检测范围为图1中的区域a和区域b。
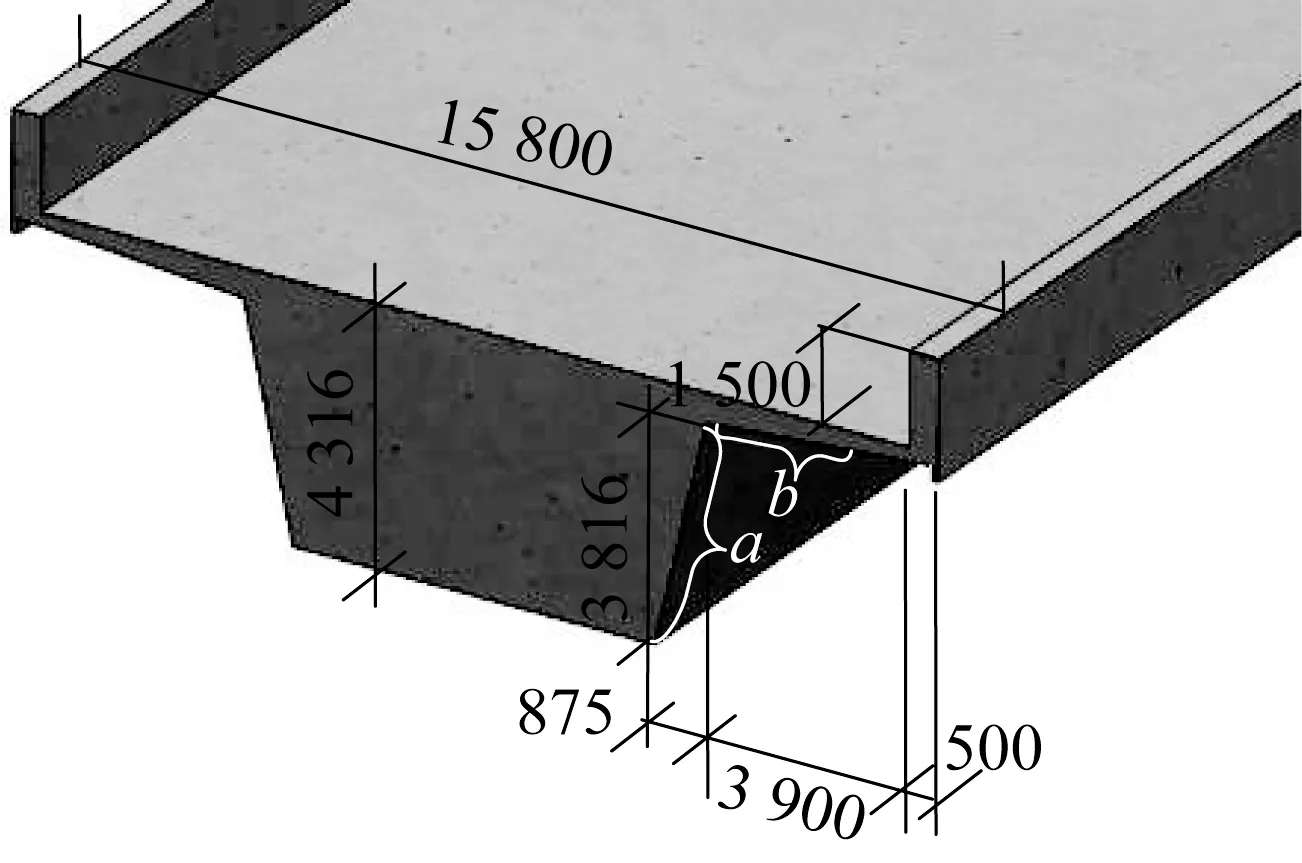
▲图1 主梁主体结构尺寸
引桥的特点是主梁厚度大、高墩,并且主梁待检测位置距离桥顶面远,护栏的上沿与主梁侧壁底端直线距离超过7.8 m。要实现机器人的长臂在桥面展开,并实现对主梁底部侧壁等部位进行检测,必须设计合理的长臂机构,并使其轻质化。
3 机构设计
根据主梁侧壁等位置的检测要求,设定轻质桥梁检测长臂机器人的基本功能指标:机器人本体轻质化、小型化;机构实现展开和收拢功能,便于运输和作业;机器人长臂末端搭载视觉传感器,实现对主梁混凝土壁面细小裂缝的精准检测。
调研分析相关专利,其中具有可实施性的两款桥梁检测装置,其展开收拢机构自由度数不小于六[8-9],作业时要实现机械臂主体由桥面上展开到桥底下作业,所需的关节转矩很大。
作为借鉴,分析传统六自由度工业机器人机构,前三个关节机构的作用是实现机械臂可达空间最大化,典型构型如图2所示,包括腰关节1、大臂关节2、小臂关节3。
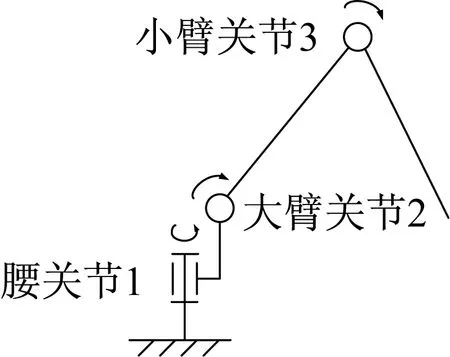
▲图2 传统工业机器人典型机构
为实现机器人轻质化设计,笔者将机器人检测作业空间范围内的负载能力作为设计依据,对机器人作业空间及运动范围的特殊性进行分析。
机器人作业空间位于桥梁下方,部分桥体及护栏是障碍物。机器人作业范围相对较小,在主梁截面内,作业空间近似为平面折线。
机器人长臂初始状态为收拢状态,停靠在桥梁主梁上表面。作业时,长臂主体从桥面上展开,并下探到桥底内侧。
机器人末端负载为视觉检测云台。
根据机器人作业任务及作业空间环境约束,完成机器人机构设计。
(1)在传统工业机器人构型的基础上,增大连杆1的长度,在腰关节1旋转到位后,大臂关节2可以延伸到桥梁护栏外部,如图3(a)所示。
(2)根据大臂关节2的位置及主梁侧壁底部的检测范围,初步规划大臂和小臂的连杆尺寸,取两者近似等长,实现末端在主梁侧壁边缘的作业要求。
(3)在保证作业空间的前提下,缩短连杆尺寸,以减小机器人的整体尺寸,满足收拢运输要求。将大臂部分拆分为大臂关节2和伸缩关节3,通过伸缩连杆增大大臂的长度,如图3(b)所示。
(4)大臂的负载能力是机器人设计的关键,为降低大臂关节2的负载要求,在小臂关节4回转收拢和伸缩关节3收缩到零位时,大臂关节2所有负载近似对称分布,从而降低大臂关节2展开和收拢工况下的负载要求,如图3(c)所示。
(5)为实现对主梁壁面的对正拍照,在小臂的末端增加俯仰关节5,以调整拍照角度,如图3(d)所示。
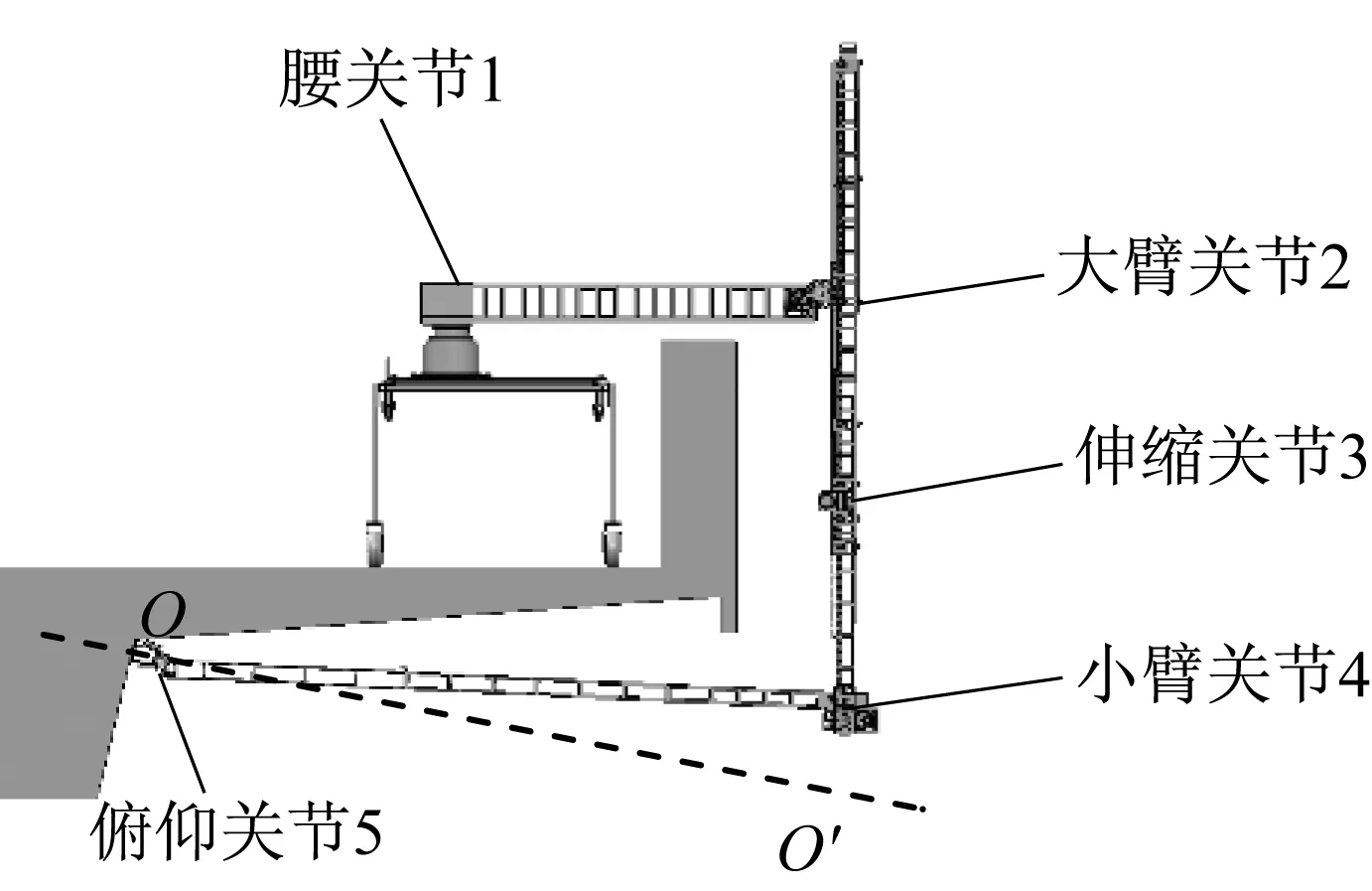
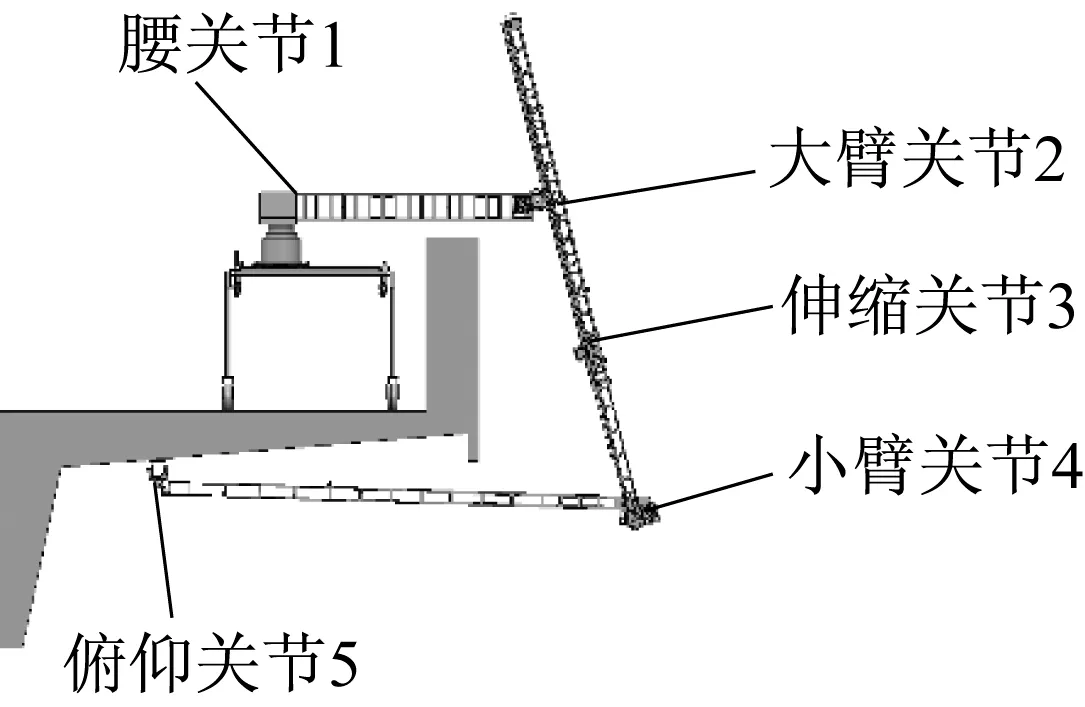
(6)综合以上分析,完成机器人完整机构设计,如图3(e)所示,包括展开和收拢状态。
4 结构设计
桥梁检测轻质长臂机器人安装在移动平台上,末端搭载视觉检测云台。机器人大臂和小臂采用方管或框架式结构,以减轻机器人本体的质量。
机器人三维实体模型如图4所示。
以连杆4为例,将末端搭载的视觉检测云台作为小臂负载,开展连杆整体强度和刚度设计。
连杆4从展开到作业需绕水平轴旋转近似360°,关节弯矩需考虑连杆水平时最大负载状态。为保证强度要求,采用大截面尺度方管,提高抗弯性能。在方管表面设计减重孔,实现轻质化,通过非均布减重孔设计,末端增大减重孔,根部减小减重孔,使在轻质化的同时提高连杆4的刚度。连杆4有限元分析云图如图5所示。
5 运动学模型
依据Denavit-Hartenberg坐标系建立桥梁检测轻质长臂机器人坐标系,如图6所示。
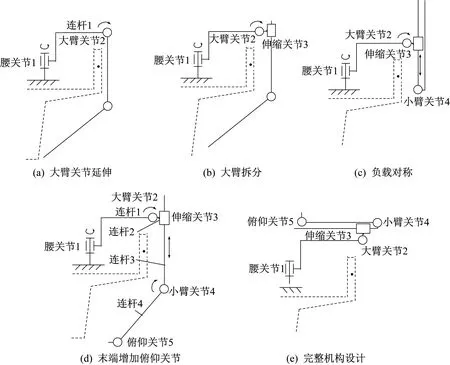
▲图3 桥梁检测轻质长臂机器人机构设计
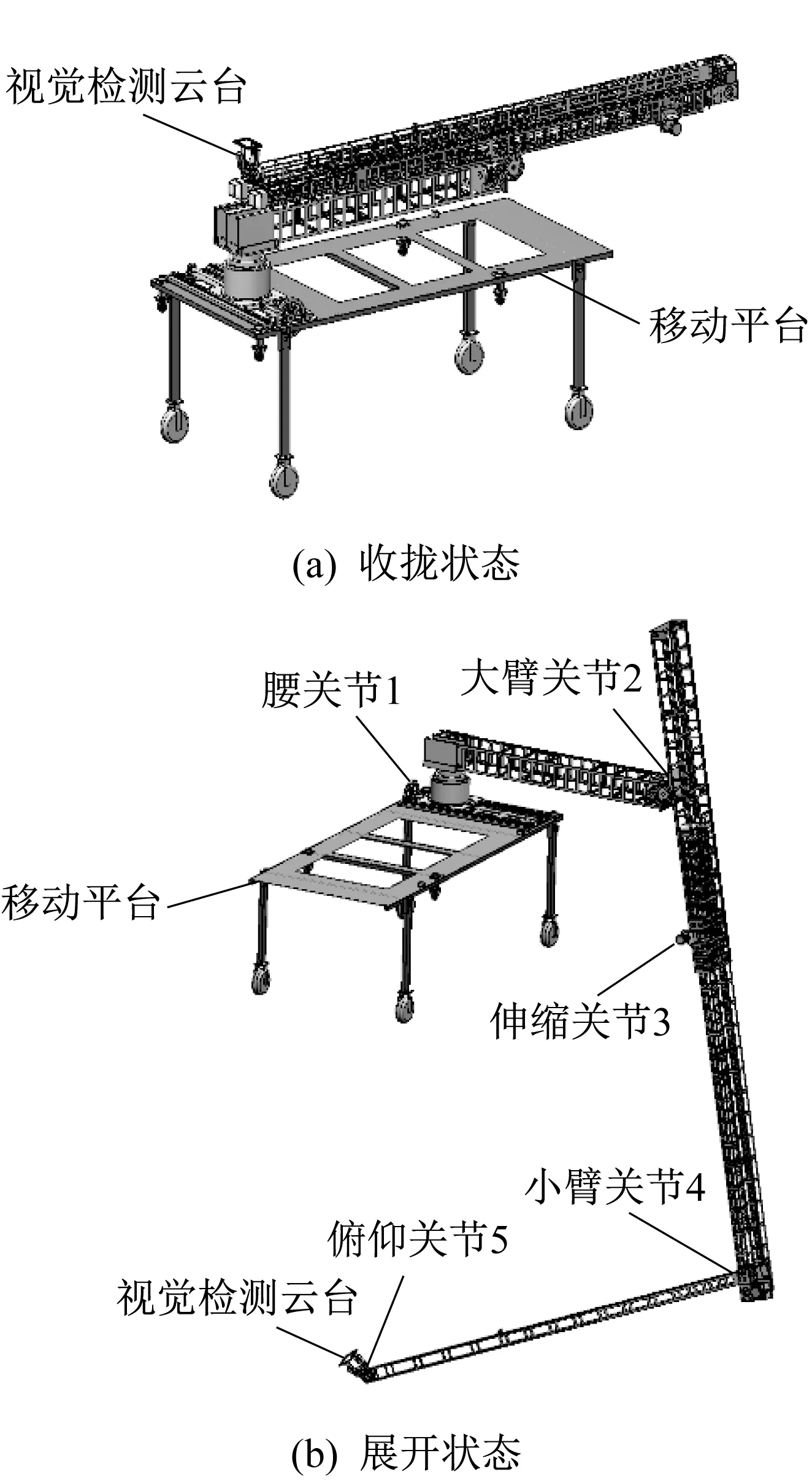
▲图4 桥梁检测轻质长臂机器人三维实体模型
机器人坐标系参数见表1。表1中,αi-1为连杆扭角,ai-1为连杆长度,θi为连杆转角,di为连杆距离。
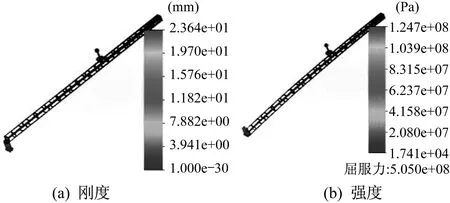
▲图5 连杆4有限元分析云图
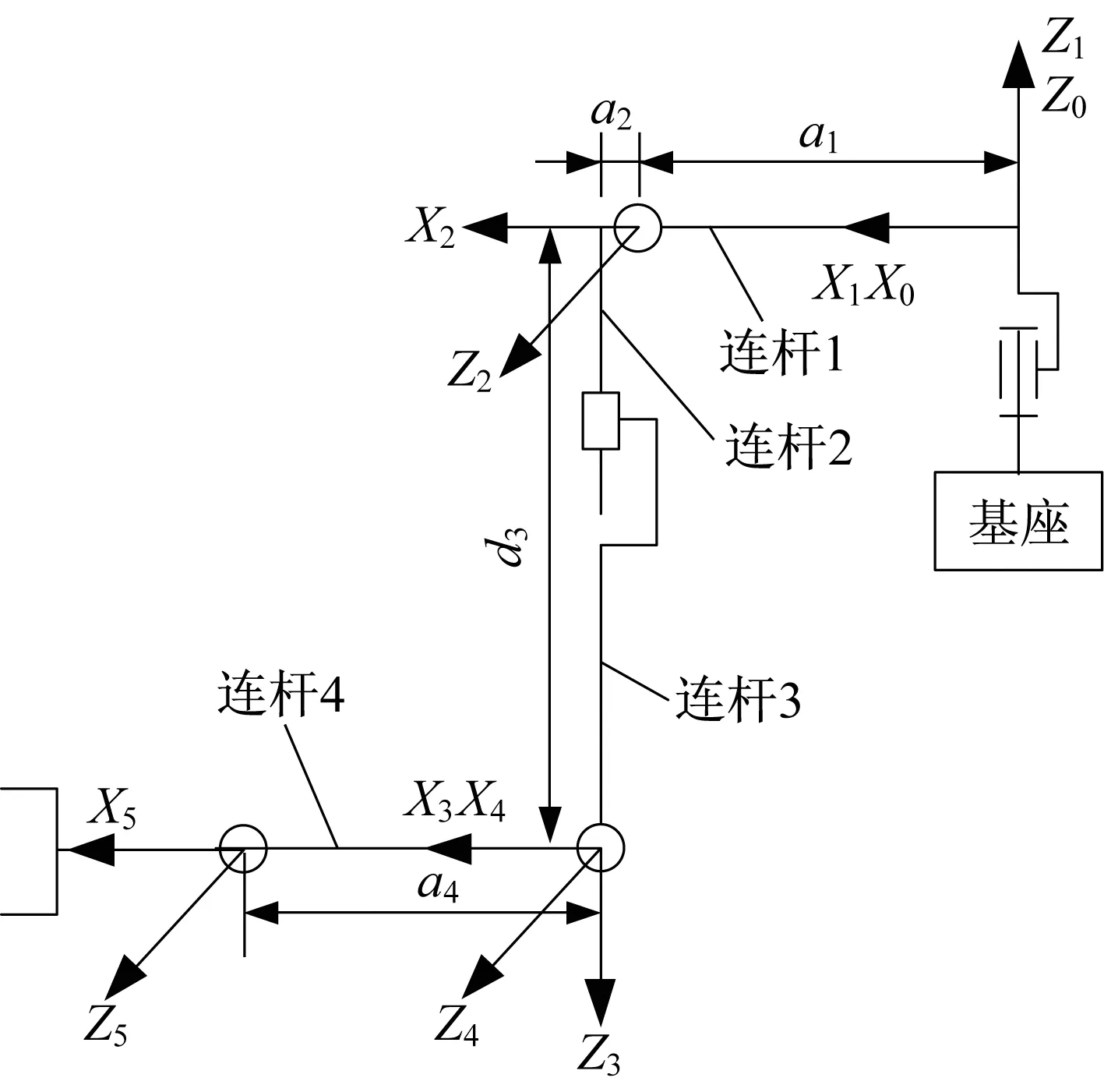
▲图6 桥梁检测轻质长臂机器人坐标系
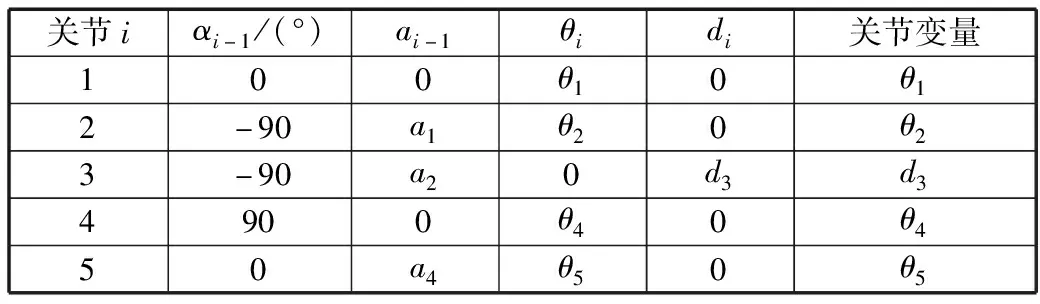
表1 桥梁检测轻质长臂机器人坐标系参数
(1)

(2)
6 运动学反解
机器人运动学反解时,已知目标点相对于机器人基础坐标系的位姿,求机器人的关节角。笔者已知桥梁主梁底部待检测点的坐标,求解桥梁检测长臂机器人各关节变量。

(3)
(4)

(5)
f1=a4cosθ4
(6)
f2=a4sinθ4
(7)
(8)
g1=a2+f1
(9)
g2=d3+f2
(10)
(11)
e1=a1+g1cosθ2-g2sinθ2
(12)
e2=-g2cosθ2-g1sinθ2
(13)
(14)
将式(8)代入式(3),得:
e1cosθ1=x
(15)
e1sinθ1=y
(16)
e2=z
(17)
将已知的末端位移代入式(15)~式(17)进行反推,即可求出各关节变量。
7 运动规划
为实现桥梁检测轻质长臂机器人的轻质化和检测作业的便捷性,机构设计、结构设计以机器人作业空间范围内的运动和负载能力作为依据,避免为满足机械臂在整个可达空间内的负载能力而带来的过于粗大的连杆和关节,以及庞大的体积问题。由此,在关节驱动力受限的条件下,针对主梁壁面不同部位的检测需求进行机器人的运动规划,显得十分重要。
(1)中国男篮与“世界水准”的差距具有梯次性, 其中,“一定差距”对应6个指标,“较大差距”对应2个指标,“相当差距”对应4个指标。不同类别的差距对应的指标不同,但造成差距的某些原因是相同或相近的。
机器人检测作业过程划分为几个阶段,对每个阶段进行关节的运动规划。
机器人由收拢状态展开到作业状态,如图7所示。关节动作如下:① 腰关节1转过90°;② 大臂关节2转过100°;③ 伸缩关节3伸长达到长度限位;④ 小臂关节4转过250°;⑤ 俯仰关节5逆向旋转,朝向壁面。在这一状态下,长臂实现最大长度,大臂关节2的转动惯量折算到电机轴处,约为电机自身惯量的23倍,很难实现转动控制,因此,大臂关节2锁死。

▲图7 桥梁检测轻质长臂机器人展开
机器人检测部位由主梁侧壁下端到侧壁中间位置,如图8、图9所示。在这一过程中,鉴于大臂关节2的锁死状态及连杆2相对侧壁的夹角,规划伸缩关节3、小臂关节4、俯仰关节5的角度,实现视觉检测云台对正侧壁。
机器人检测部位由主梁侧壁中间位置到侧壁顶端,如图10所示。在机器人末端到达主梁侧壁中间位置附近时,连杆3的端部与连杆2的端部近似重合,大臂关节2的转动惯量折算到电机轴处后,与电机自身转动惯量的比值减小到8.62,大臂关节2可解锁。因此,在这一阶段的运动学反解时,可规划的关节变量包括大臂关节2、小臂关节4、俯仰关节5的转角。为保证机械臂不处于奇异状态,小臂关节4的位置要高于侧壁顶点法线位置,伸缩关节3锁死。

▲图8 主梁侧壁下端检测

▲图9 主梁侧壁中间检测
▲图10 主梁侧壁顶端检测
机器人检测部位由主梁侧壁顶端到主梁外沿约1/4处,如图11所示。此时,大臂关节2与竖直面夹角为15°,达到最大值。
▲图11 主梁外沿1/4处检测
机器人末端在主梁侧壁顶点附近沿主梁顶面横向移动检测拍照,伸缩关节3角度不变,运动学反解规划的对象包括大臂关节2、小臂关节4、俯仰关节5。
机器人检测部位由主梁外沿约1/4处至外沿约1/2处,如图12所示。

▲图12 主梁外沿1/2处检测
机器人拍照检测位置沿主梁顶面向边缘移动,鉴于主梁外沿约1/4处的极限位置,大臂关节2保持锁死,运动学反解规划的对象包括伸缩关节3、小臂关节4、俯仰关节5。
以上为整个检测过程的运动规划,需要说明的是,主梁外沿剩余1/2范围内不做检测要求,但可以通过调整机器人安装座在移动平台上的横向位置,减小移动平台到护栏的距离,完成该范围的检测。
8 运动仿真
基于桥梁检测轻质长臂机器人的运动规划,利用运动学模型,开展运动学反解仿真分析。根据作业过程,给出目标检测点相对机器人基础坐标系的旋转变换矩阵,由运动学反解,仿真计算关节转角及伸缩量。
机器人对主梁检测过程的运动学反解仿真结果如图13所示,其中,横坐标为检测点在基础坐标系中X轴的坐标。
在检测作业过程中,为实现末端检测,连杆2由最初靠近桥体逐渐外展,转角逐渐减小。小臂关节4转角与俯仰关节5转角紧密相关,主梁侧壁倾斜角度大于16°,当检测位置由主梁侧壁下端沿侧壁上移时,连杆4趋向于与侧壁平行,小臂关节4转角逐渐减小,俯仰关节5要指向侧壁,转角逐渐增大。大臂开始外展时,小臂关节4转角逐渐增大,俯仰关节5转角逐渐减小。大臂继续外展,小臂关节4转角继续增大。检测部位由主梁侧壁顶端到主梁外沿约1/4处初始,俯仰关节5检测面突变,转角突变,随后微量增大。后续检测过程中,随着连杆4长度的增大,小臂关节4转角继续增大,而俯仰关节5相对于连杆4反向运动,转角锐减。
上述仿真结果通过运动学正解得到验证。
9 结束语
针对高墩、大厚度、宽幅桥梁主梁快速、便捷检测的要求,在传统工业机器人构型分析及主梁结构尺寸特性分析的基础上,设计了一种桥梁检测轻质长臂机器人。

▲图13 检测过程仿真结果
在设计中,建立了机器人运动学模型,基于作业空间和关节力矩特性分析,规划了机器人检测作业运动。通过输入末端视觉检测云台的检测位置,仿真计算运动学反解,验证了各关节的运动。笔者的设计为最终桥梁检测轻质长臂机器人样机研制和检测作业运动控制提供了技术支撑。
猜你喜欢
环境技术(2021年4期)2021-09-11
工程建设与设计(2021年11期)2021-07-28
民主与法制(2020年16期)2020-08-24
四川冶金(2019年4期)2019-11-18
中国外汇(2019年15期)2019-10-14
中国外汇(2019年14期)2019-10-14
模具制造(2019年3期)2019-06-06
载人航天(2016年4期)2016-12-01
舰船科学技术(2016年1期)2016-02-27
综合智慧能源(2014年1期)2014-09-10
