托管架/起重机联合工作状态下的起重铺管船水动力性能
2022-01-05 06:23罗瑞锋黄曌宇
中国海洋平台 2021年6期
罗瑞锋,黄曌宇
(上海振华重工(集团)股份有限公司,上海 200125)
0 引 言
起重铺管船兼具吊装、起重、铺管作业等功能,属于深海油气田开发过程中的主要施工设备。
起重船和铺管船水动力性能的相关研究较多。陈徐均等[1]采用凯恩方法,结合流固耦合理论分析浮式结构物多刚体系统,并提出其运动方程。韩端锋等[2]研究全回转起重船在船-吊物、船-系泊等多系统耦合作用下的运动响应。任会礼[3]建立锚泊起重船整体系统的刚柔混合动力学模型。李金玉等[4]研究铺管船在铺管和起重状态下的运动响应,分析不同吊索长度对船横摇和吊钩运动的影响。许鑫等[5]研究半潜式起重铺管船在波浪作用下起吊准备状态的运动性能。陈永訢等[6]对铺管船作业工况进行数值分析,研究托管架对铺管船水动力性能的影响。徐普等[7]提出双层管铺设力学模型,并对该状态进行动力响应分析。闫宏生等[8]进行船体、托管架及管线三者耦合状态下的水动力性能分析。
这些研究大多对起重船起重工况或铺管船铺管工况进行单独分析,鲜有将起重铺管船的2种工作状态结合分析。为进一步适应更大水深、更粗管径的管线敷设,尾部托管架的长度越来越长,相应地托管架对整船水动力性能的影响也愈加显著。对于起重功能来说,船体在波浪中的运动引起的吊物摆动会进一步增加船体的运动幅度,进而对起重作业产生巨大的不利影响。因此,托管架和起重机联合工作状态下的水动力性能研究势在必行。
本文以某起重铺管船为研究对象,对比分析托管架与起重机联合工作状态下在频域范围内的运动响应结果,并得出一些有益的结论。
1 数值分析理论基础
1.1 势流理论及莫里森公式
对船体部分进行基于三维势流理论[9]的频域内水动力载荷分析:
Δ(Φi+Φd+Φr)=0
(1)
式中:Φi为入射势;Φd为绕射势;Φr为辐射势,由Φr可得到船体势流附加质量和船体势流阻尼系数。这些变量均只与船体湿表面积和几何形状有关,而与船体的质量无关。
对于构成托管架的细长杆件,采用半经验的莫里森公式进行水动力载荷分析:
Fm=Fd+Fi
(2)
式中:Fm为细长杆件波浪载荷;Fd为拖曳力,为非线性项;Fi为惯性力,为线性项,可分为波浪惯性激励力和杆件附加质量惯性力。Fd计算式为
Fd=ρ/2DCd|uf-us|(uf-us)
(3)
(4)
Fd经线性化处理后可分为波浪拖曳力和杆件拖曳阻尼力两部分。
1.2 运动方程
考虑线性系统下的频域运动方程为
(M+m)a+Cv+Ku=Ft
(5)
式中:M为整船质量;m为附加质量,包括势流附加质量和杆件附加质量;C为黏性阻尼系数,包含黏性阻尼、船体势流阻尼和杆件拖曳阻尼;K为回复力系数;a、v、u分别为物体的加速度、速度和位移;Ft为总波浪激励载荷,包括船体势流波浪激励力、杆件波浪惯性激励力和杆件拖曳激励力。
2 数值分析
2.1 数值分析条件
对4种载况进行数值模拟分析:载况1为预起重状态1(空钩,无托管架)、载况2为预起重状态2(空钩,带托管架)、载况3为一般起重状态(含钩载,无托管架)、载况4为托管架起重机联合工作状态(含钩载,带托管架)。整船模型如图1所示。4种状态下的主要载况参数如表1所示。
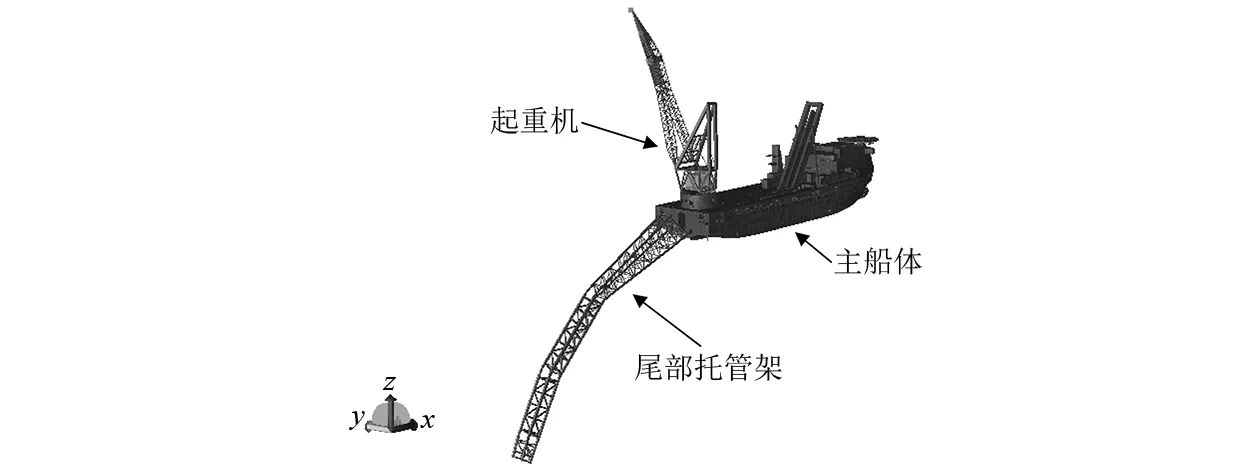
图1 整船模型
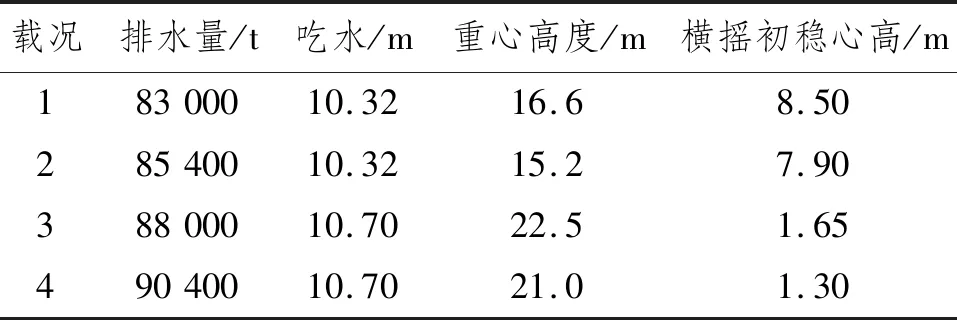
表1 数值模拟起重铺管船载况
选择整船在波浪中的垂荡、横摇和纵摇进行水动力响应分析,考虑5个浪向:0°、30°、90°、120°和180°。
考虑起重机作业的实际海况,有义波高不超过2 m的4个波浪条件如表2所示。波谱采用JONSWAP谱。
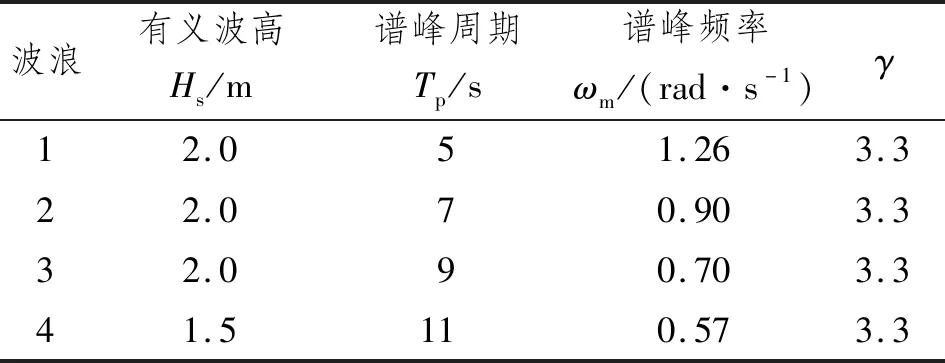
表2 波浪条件
2.2 数值结果及分析
采用SESAM软件对本船船体-托管架系统体进行基于三维势流理论及莫里森公式的水动力载荷分析。水动力模型如图2所示。
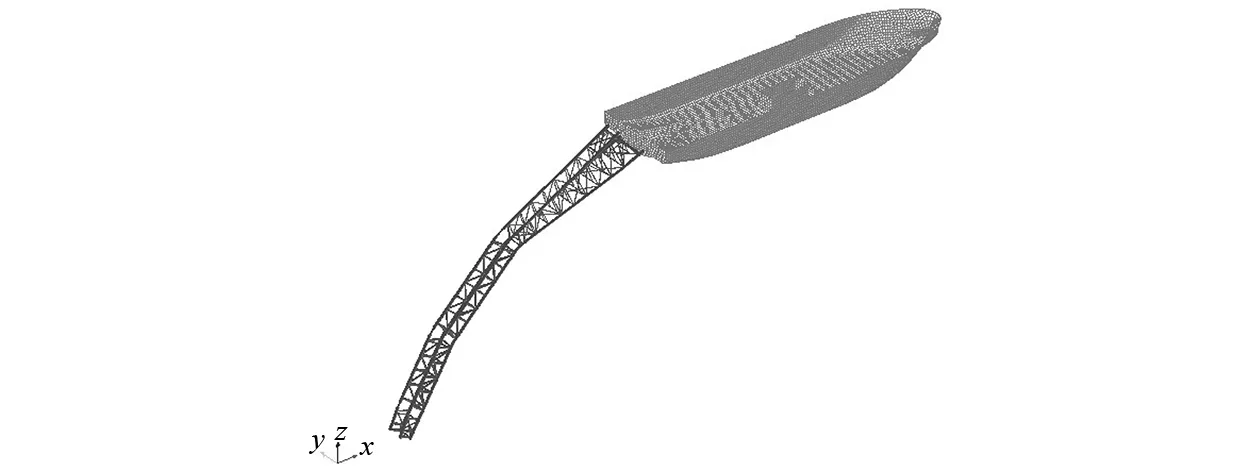
图2 水动力模型
对于式(5)中的黏性阻尼系数C:船体势流阻尼和杆件拖曳阻尼两部分由软件自动求解;对黏性阻尼,主要通过以往相似船型实船数据的累积,对无托管架载况1和载况3分别取临界阻尼的6%和3%,然后通过数值分析得到相应船体黏性阻尼的具体数值,并将其叠加至带托管架载况2和载况4的响应分析中。
针对水动力响应结果,分别从幅值响应算子(Response Amplitude Operator,RAO)特性和托管架对铺管船运动性能影响两个方面进行分析。
2.2.1 RAO特性
本船在各载况下垂荡、横摇和纵摇RAO结果如图3~图5所示。
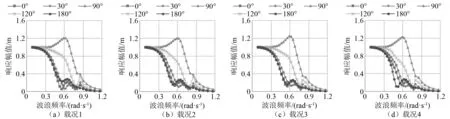
图3 垂荡运动响应RAO
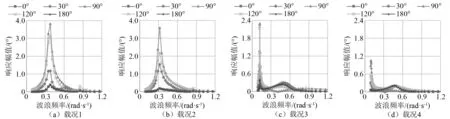
图4 横摇运动响应RAO
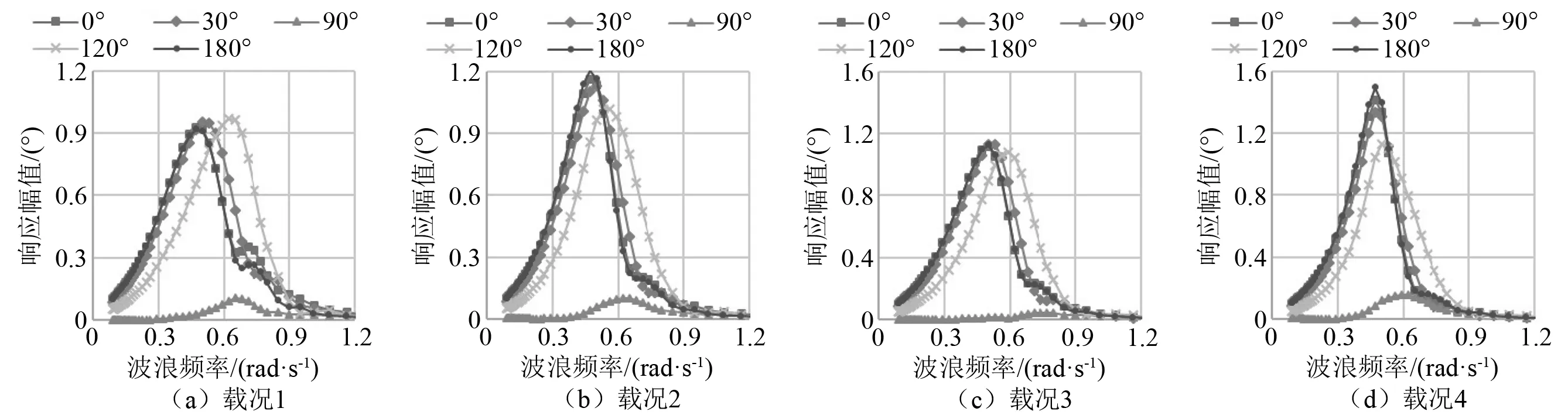
图5 纵摇运动响应RAO
由图3~图5可知,本船在带托管架前后状态下的运动趋势基本一致,规律如下:
(1)各载况下的垂荡响应幅值均在波浪频率为0.6 rad/s附近达到最大,横浪(90°浪向)时响应最大;带托管架后,垂荡响应幅值变化较小。
(2)载况1和载况2的横摇响应幅值在波浪频率为0.4 rad/s附近达到最大,横浪时响应最大;带托管架之后,横摇响应幅值降低约6%。
(3)载况3和载况4的横摇响应幅值有2处峰值:第1个峰值出现在0.1 rad/s附近,横浪时响应最大,其原因主要是在起重机带载的情况下,整船初稳心高由预起重状态的8.0 m左右下降至1.5 m左右,大幅降低整船的横摇固有频率,托管架结构对该频率位置的横摇响应幅值抑制作用明显,可达50%;第2个峰值出现在0.5 rad/s附近,且尾浪(0°浪向)、斜浪(30°和120°浪向)和迎浪(180°浪向)时响应比横浪更大,该横摇响应峰值对应的波浪频率和浪向与第(1)条所述垂荡运动响应峰值结果一致,分析原因主要是船体带有1个大月池开口,在浪向沿船长方向存在分量的情况下,波浪频率与月池内部水体的垂向活塞运动产生共振,该月池开口的非对称布置(位于船体右舷)使整船产生横摇运动,而且托管架结构对该频率位置的横摇响应幅值抑制作用同样明显,可达30%。
(4)各载况下的纵摇响应幅值均在波浪频率为0.5 rad/s附近达到最大,尾浪和迎浪时响应最大;带托管架后,纵摇响应幅值明显增加。
2.2.2 托管架对铺管船运动特性影响
考虑表2所述波浪条件,结合第2.2.1节,对各浪向下的垂荡、横摇和纵摇进行短期响应统计[10-11],得到各载况下本船对应不同波浪条件的运动响应最可能极值Rmax。统计结果如图6所示。
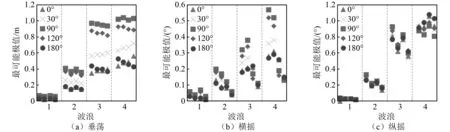
注:每个波浪下从左至右依次为载况1~载况4图6 运动响应最可能极值
由图6可知,输入波高为1.5 m的波浪4的响应结果明显大于其余3个波高为2.0 m的波浪。分析原因,主要是当波浪激励频率在0.50 rad/s附近时,各载况下的垂荡、横摇和纵摇运动均出现峰值(见图3~图5),波浪4的谱峰频率(0.57 rad/s)正好落在该峰值区间内。
将输入海况为波浪4时对应各载况的响应结果绘制成曲线,如图7所示。

图7 波浪4运动响应最可能极值
由图7可知:
(1)垂荡的危险浪向为横浪,这与RAO曲线趋势相符合。且在该浪向下,各载况的垂荡响应极值差异很小,这说明在给定海况下有无托管架对整船的垂荡没有影响。
(2)对于无钩载预起重状态,横摇的危险浪向为横浪;对于有钩载的起重状态,危险浪向为尾浪:这均与RAO曲线峰值趋势一致。且带托管架状态的横摇响应极值均小于未带托管架状态,说明托管架带来的拖曳阻尼对横摇运动的影响大于托管架带来的波浪激励载荷对横摇运动的影响。
(3)纵摇的危险浪向是迎浪,这与RAO曲线趋势相符合。对于预起重状态,托管架在一定程度上放大了纵摇运动,但是该影响弱于由钩载引起重心升高对纵摇运动的影响,且对于带钩载的起重状态,托管架对纵摇运动还起到一定程度的抑制作用。
3 结 论
在考虑主船体、托管架、起重机及其货载作为单个刚体系统的前提下,研究某起重铺管船运动幅频响应因子和极值响应,对比多种海况下托管架与起重机联合工作状态的水动力性能,结果表明:
(1)对于铺管船预起重状态及带钩载的起重状态,垂荡、横摇和纵摇运动响应RAO峰值频率均在0.4 ~ 0.6 rad/s,横浪对垂荡的影响最显著。
(2)对于带钩载的起重状态,本船的大月池开孔使在尾浪、斜浪和迎浪下的船体横摇幅度大于横浪下的船体横摇幅度。
(3)在给定载况下,本船所带托管架对垂荡影响很小,对横摇有明显的抑制作用,对纵摇的影响随装载状态及浪向的变化而不同,但是以最终带钩载后的起重状态来说,其作用整体而言是积极的。
(4)一般来说,与铺管作业相比,起重作业海况的波高要求更低,考虑到本船所带托管架对整船运动的相对积极作用,从水动力性能的角度来看,该起重铺管船尾部托管架与起重机同时联合工作的可能性是存在的。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
学苑创造·A版(2022年4期)2022-06-18
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
数学物理学报(2021年2期)2021-06-09
当代陕西(2020年24期)2020-02-01
小哥白尼(趣味科学)(2018年12期)2018-12-18
数学物理学报(2016年6期)2016-04-16
焊接(2015年9期)2015-07-18
海军医学杂志(2015年2期)2015-02-27