太阳能光伏发电系统低频振荡控制技术研究
2022-01-05 08:25:04郑发松
能源与环保 2021年12期
黄 鹤,郑发松
(国家电投贵州金元金元股份有限公司,贵州 贵阳 550000)
社会的发展与进步离不开能源的支持,传统的化石燃料会产生严重的环境污染问题。近年来,随着人们对于环境问题的重视,逐步开发了一系列清洁能源作为我国能源结构调整的重要基石。太阳能光伏发电是我国应用比较广泛的新能源,将其接入到传统的电力系统中,可以在一定程度上减少化石燃料的燃烧[1-4]。但是受到资源分布和性能的影响,传统电力系统在接入太阳能光伏发电系统时,会受到太阳照射等不可抗力的影响,导致太阳能光伏发电系统中存在低频振荡,影响整体供电的稳定性。在发电系统的实际运行过程中,产生的这种低频振荡会造成跳闸或机组失步解列,对于电网的安全稳定运行存在着非常大的影响。因此,对太阳能光伏发电系统的低频振荡进行控制,是目前研究的重要问题。
一些学者和专家在低频振荡控制中做出了一些研究,学者邓伟等通过留数法建立一个电网等值单机系统模型,将低频振荡所产生的水锤效应和系统稳定性之间的关系问题进行深入剖析;而学者王鹏则利用非线性控制算法对振荡阻尼进行控制,实现双馈感应发电机区域间低频振荡的控制。以上方法都在实际应用中取得了一定的效果,但是上述方法中的控制原理都是基于基本运行状态所设计的,没有兼顾多种运行状态下的外部干扰影响,导致不能很好地控制不同运行状态下的低频振荡,整体控制效率不理想,因此本文设计一种太阳能光伏发电系统低频振荡控制技术。
1 低频振荡控制
1.1 太阳能光伏发电系统建模
太阳能光伏发电系统中的光伏电池排列方式是建模过程的重点研究内容,经过串联或并联后可以得到光伏阵列模型[5-6]。光伏阵列即太阳能电池板,它可以将大部分太阳能以电能的形式表现出来,这种经过太阳能转化出来的电能成为整个电力系统的供电能源,用户在连接到互联网后就可以直接进行集成并网发电。将经过封装的光伏电池和功率控制器等零部件进行组合,得到的光伏发电系统模型如图1所示。
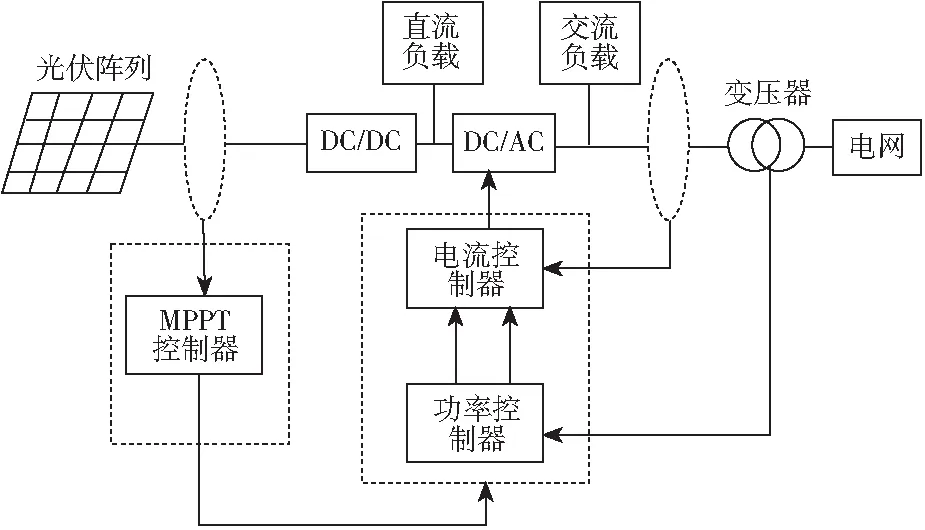
图1 太阳能发电系统模型结构Fig.1 Model structure of solar power generation system
对于图1所示的太阳能光伏发电系统来说,主要出现的低频振荡问题就是光照间歇性以及负载变化。功率不平衡导致联络线的功率出现低频振荡[7-8]。对于光伏发电系统中单台的逆变器来说,需要对光伏电池的各项参数进行计算,并进行有功参考建模。
最大功率电流的计算公式为:
(1)
式中,Im为最大功率点电流;Sref为参考光照强度;S为外部变量中的光照强度。
光伏电池的最大功率电压的计算公式为:
(2)
式中,Um为光伏发电系统中最大功率点两端的电压[9-10],光伏电池板经过汇聚之后,输出电流的计算公式为:
(3)

根据以上计算公式,可以得到太阳能光伏发电系统的模型:
(4)
式中,Ppv为光伏阵列输出功率;Pref为发电系统中逆变器的额定功率;Idc为光伏发电系统中直流侧的输入电流;SB为系统中的基准容量。
至此,完成太阳能光伏发电系统的建模。
1.2 附加阻尼控制器设计
本文的附加阻尼控制器在保证设计复杂度简化的同时,还需要在太阳能光伏发电系统运行下兼顾多种运行状态下的外部干扰影响,有效实现振荡抑制[13-14]。在阻尼器的设计过程中,可以将参数计算问题转化为目标函数的最优解求值问题[15-16]。本文设计的附加阻尼控制器的结构如图2所示。图2中,数据预处理主要包括对反馈信号进行量测和隔直,TR表示反馈信号输入时所测得的时间常数,TW表示隔直过程中的时间参数,在相位补偿过程中,涉及到的T1-T4均为相位补偿时间参数[17-18];在放大环节中,Kp表示信号的输入放大倍数,决定了在控制过程中阻尼释放的大小,限幅主要是为了防止控制过程中产生超调。光伏发电系统中的电源对于光照条件比较敏感,因此光照条件直接影响电池的输出功率[19-20]。

图2 附加阻尼控制器结构示意Fig.2 Structure diagram of additional damping controller
本文对控制器的控制参数进行优化,并输入不同状态的参数进行研究。控制器中需要优化的变量可以设置为:
xk={Kp,k,T1,k,T3,k}
(5)
在上述变量集合中,在最优搜索过程中都会对应一个优化的变量元素。也就是说,在基于参数约束限制的条件下,生成人工蚁群搜索种群,表示为:
X={x1,x2,…,xn}T
(6)
根据不同的低频振荡状态,金属控制器的输出阻尼比作为目标函数的适应度,指导蚁群算法的巡游方向,并不断迭代更新搜索最优值,实现低频的振荡控制。至此完成太阳能光伏发电系统低频振荡控制技术研究。
2 仿真算例
2.1 算例分析
本章为了验证设计的太阳能光伏发电系统低频振荡控制技术的有效性,设计算例仿真实验。在MATLAB软件下构建太阳能光伏接入经典四机两区域的发电系统,接线情况如图3所示。

图3 电力系统仿真示意Fig.3 Schematic diagram of power system simulation
图3中包含2个相似的区域系统,2个区域中依靠一条联络线连接,G1—G4为发电单元,L7、L9代表负荷,6为母线,其余为各部分的连接线。整个系统在正常工作过程中输出的有功功率为300 MW,联络线的传输功率一般为450 MW。为了保证算例模型不会受到外界的过多干扰,算例中的各个发电机均不设置PSS。
设置算例中的不同运行状态,见表1。
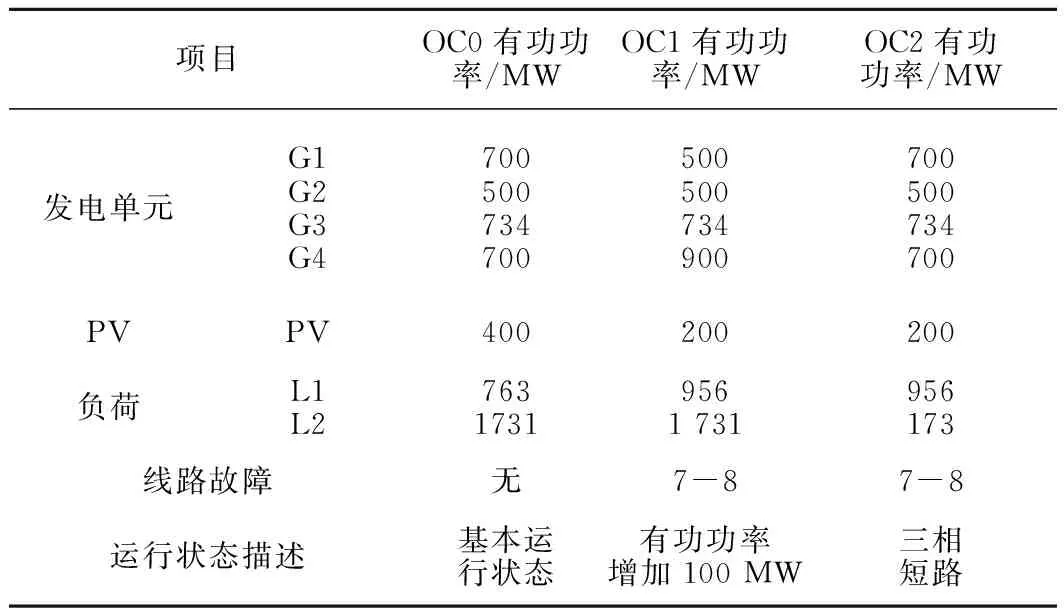
表1 系统运行状态参数Tab.1 System operation state parameters
在不同的运行模式下,为了保证仿真实验的可靠性,需要对控制技术中的控制器参数进行优化。在此过程中利用人工蚁群算法进行优化,将每只蚂蚁中所包含的待优化参数范围设定好,即X={x1,x2,…,x10}T,将步长、视野以及最大的迭代次数进行设置,至此完成实验参数的设定。为了验证本文设计的太阳能光伏发电系统低频振荡控制技术在实际应用中的优越性,对负荷突变扰动低频振荡控制结果以及光照突变扰动低频振荡控制结果进行分析。
2.2 仿真结果分析
在实验过程中,设置不同类型的扰动分析机电低频振荡的抑制效果。负荷发生突变时,联络线的有功功率曲线变化情况如图4所示。

图4 负荷与光照突变扰动低频振荡控制结果Fig.4 Control results of low frequency oscillation caused by load and illumination sudden change disturbance
以OC0为初始运行状态,并在仿真算例电力系统运行时间为1 s时将线路的有功负荷增加10%。从图4的联络线有功功率的变化情况可以看出,联络线的有功功率随时间的增加,由最开始的180 MW变为160 MW,在0~6 s,联络线的有功功率的变化还比较大;在6 s以后逐渐呈稳定下降趋势,说明本文控制方法能够更加有效且快速地抑制联络线的低频振荡,具有更小的超调量。
由于太阳能发电具有非线性波动的特性,主要是由于光照条件会受到自然天气的影响而发生突变。在加入光照突变扰动的情况下,联络线的有功功率曲线变化情况如图4(b)所示。
在运行状态为OC0时,将光照在1 s时增加10%,得到的系统联络线的单回线路有功功率曲线出现了低频振荡。在不同的处理手段下,本文方法刚开始出现了一定的波动,但是在初始控制时的超调量比较的小,且在7 s左右就趋于平稳状态,说明本文的控制方法不容易受干扰、稳定性较强。
综上所述,当太阳能光伏发电系统在负荷或光照下发生突变时,本文控制方法对系统中联络线的功率低频振荡起到一定的平稳作用,验证了控制技术的有效性。但是在实际应用中,本文控制技术在设计附加阻尼器的过程中综合考虑了多种状态的外部干扰,因此在控制过程中能减少超调,快速完成低频振荡控制。
3 结语
太阳能光伏发电最大的特点就是不存在惯性,因此电力系统中具有不确定的阻尼影响。由于光伏发电受到不可抗力的影响会存在一定间歇性,在这种具有一定储能容量的系统中设计一个附加阻尼控制器,能够有效地对低频振荡进行控制。对太阳能光伏发电系统进行建模,分析太阳能发电系统控制结构,计算出各项参数,得到太阳能光伏发电系统的模型,利用阻尼控制器作为低频振荡整体控制手段,设计附加阻尼控制器结构,利用蚁群算法得到控制器中的最优参数,实现低频振荡控制。通过仿真实验验证,本文设计的控制技术取得了良好的控制效果,并且稳定性较好。
猜你喜欢
山东交通科技(2020年2期)2020-08-13 09:24:04
铁道通信信号(2020年10期)2020-02-07 01:01:30
铁道通信信号(2020年9期)2020-02-06 09:16:04
建材发展导向(2019年13期)2019-08-24 06:37:40
电子制作(2019年7期)2019-04-25 13:16:50
照明工程学报(2016年3期)2016-06-01 12:17:56
中国学术期刊文摘(2016年2期)2016-02-13 16:01:41
新乡学院学报(2015年6期)2015-11-06 08:04:55
电网与清洁能源(2015年2期)2015-02-28 16:03:15
电测与仪表(2014年1期)2014-04-04 12:00:32