人车路综合风险场模型构建及驾驶风格评估
2021-12-31 03:52熊坚施锦浩万华森
交通运输系统工程与信息 2021年6期
熊坚,施锦浩,万华森
(昆明理工大学,交通工程学院,昆明 650504)
0 引言
人因是导致交通事故最关键因素,约超过90%的交通事故都与驾驶人行为相关,其中潜藏在驾驶人自身的不良驾驶习惯、错误的风险认知倾向、过于自信或过于谨慎的驾驶能力自我认知等主观隐性诱因均对安全驾驶带来深层次的隐患,如何帮助驾驶人正确认知自我“真实”的驾驶能力尤为关键。
因驾驶人人因属性要素具有时变、非线性动态特征,准确的驾驶技能评估、驾驶风格辨识具有一定挑战,驾驶风格分类及辨识一般通过模式识别或系统辨识等学科理论解决[1],主要研究方式为模型聚类和主观问卷分析两种。在聚类方面,通常先根据驾驶模拟或者实车试验得到车辆状态及油门刹车踏板及驾驶人生理、心理数据,再利用机器学习分类算法,例如K-Means[2]、神经网络、高斯隐马尔科夫模型(HMM)[3],或者模糊数学[4]等数学方法对模型数据进行训练从而得到驾驶人分类。而上述聚类模型主要通过不同模型组合提高分类精度,且研究对象多为独立驾驶人,缺少“人-车-路-环境”交互的驾驶人输出结果,Wang等[5]提出了行车风险场理论用于评估交通场景多要素交互下动态风险,并设计了安全预警算法,为驾驶过程中影响驾驶安全的“人-车-路-环境”要素构建了统一模型,并将风险场与电场进行类比,重构风险场力作用机制,开展跟车和汇入场景下实车试验得到驾驶人风险响应度模型,为驾驶人的状态评估提供了新的研究视角[6]。在主观问卷方面,驾驶风格量表主要有1993年Elander 等研发的DSQ(Driver Style Questionnaire)和2004年Taubman-Ben-Ari O. 等提出的MDSI (Multi-Dimensional Driving Style Inventory)[7],2014年孙龙等[8]引入MDSI的中文版测量驾驶人的驾驶情绪风格分为冒险型、愤怒型、焦虑型这3种类型,然而这些问卷没有对驾驶风格和驾驶行为作出严格区分,并且主观问卷主要评估驾驶人的驾驶意识,对实际驾驶操作能力表征较弱,属于主观心理层面,分类划分标准较为粗糙。
综上,驾驶风格评估研究的方法往往各自独立,缺少驾驶人安全意识及其对应驾驶能力的综合考量;模型多为对不同试验数据的直接聚类分析,指标选取简单,对驾驶人面对外部客观风险作反馈的深层次安全驾驶能力机理解释不足;用于风格评估的试验场景多为城市道路跟车和汇入,少有复杂紧急突发风险场景下驾驶测试以全面考量驾驶人应对风险的安全驾驶能力。
本文构建在紧急突发风险下考虑驾驶风格因子的综合风险场模型,开展驾驶模拟试验评估驾驶人驾驶能力,针对风险激励信号突变、非稳态特征引入HHT变换时频分析技术进行局部处理将风险综合作用转化为风险能量计算,评估驾驶人在面对外部客观环境风险时采取主观驾驶操作的综合风险,对得到的驾驶风险能量利用K-means聚类与公安部道路交通安全研究中心的“防御性驾驶人驾驶风格自测问卷”对比识别出驾驶危险人群,为研究驾驶人驾驶风格,帮助驾驶人真正实现安全驾驶提供新的方法。
1 综合风险场模型的构建
经典的行车风险场模型可以较好地评估车辆在“车-路”要素下的行车风险,侧重描述主车特性、外部风险特性,但模型在驾驶人的驾驶特性方面未能开展细致地讨论,驾驶人根据外部客观风险的感知、判断因不同的驾驶内在“习性”,即驾驶风格,采取不同的对策从而产生不同的驾驶风险。
1.1 基本模型结构
行车风险场统一模型主要表征人-车-路各要素对行车安全造成的风险度,根据模型核心车辆动能场[5],本文定义任意车辆i在(xi,yi)处的风险场场强Ev为

式中:D为风险场中主车与冲突物体之间的位移,计算时取标量距离(m);Vi为车辆i运动速度(km·h-1);θi为主车运动方向与D之间的夹角;d0为主车距离道路边界的距离(m);ω*为总车道宽(m);Mi为因物体属性不同而对行车产生潜在风险的等效质量,行车风险场将风险场景中所有车辆统一为等效质量,与物体实际质量mi、车辆速度vi有关,此处vi与Vi为相对概念,即他车与主车,选取随具体场景而定。等效质量不同发生碰撞时造成的严重程度不同,文献[5]通过高速公路车速及事故数标定了式(1)的相关参数,得到

Ri为道路环境影响因子,表征路面行车条件(路面材料摩擦系数μi、道路视觉能见度γi、道路坡度δi、道路曲率ηi)对驾驶安全性的影响,定义任意车辆在(xi,yi)处道路环境影响因子为

式中:φ为道路风险函数,以道路条件最好为基准,假设在该条件下的风险函数为1,其他条件下的风险函数取值根据其条件下的事故平均死亡人数和基准条件下的事故平均死亡人数的比值确定。
1.2 考虑驾驶人驾驶风格的风险场模型
整个驾驶任务中的风险,除了上述复杂交通环境的客观风险外,还跟驾驶风格属性有紧密关系。驾驶风格为驾驶人长期形成的习惯性驾驶方式,具有内在稳定性,并受驾驶人自身性格、风险认知、驾驶能力自我评价等众多因素影响,而驾驶过程风险无法抛开驾驶人的主观要素进行研究,故风险模型应考虑驾驶人的风格属性。驾驶风格研究表明,车辆加速度方差、方向盘转角值方差与驾驶人驾驶激进程度具有高相关性[9],由于车距、速度、轨迹角度等参数在客观风险模型中均有体现,主观驾驶风险量化部分则不纳入,本文定义驾驶人风格因子w为

式中:δα为一定距离驾驶人行驶加速的方差,驾驶人加速度方差较大时,表示其一定时间内频繁地加速、制动,与速度指标相比,加速度指标能够更好地反映激进、急躁的驾驶风格,体现脚部完成驾驶任务(加减速)的激进程度;δβ为方向盘转角方差,用以衡量驾驶人对方向盘的操纵行为的稳定程度,值越大表示对方向盘操纵越紊乱,体现手部完成驾驶任务的激进程度,指数部分统称为驾驶风格隶属度;a,b为待定系数。
故人车路综合风险场模型为
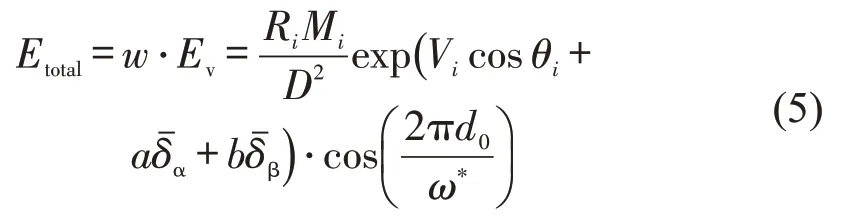
式中:Etotal为风险场场强,衡量主车在复杂交通环境中的综合风险。为便于运算,a,b待定系数取1。
1.3 驾驶风险能量计算
目前风险场模型的风险评估指标主要为Wang等[5]提出的风险势能RPE(Risk Potential Energy),但风险势能是对时间域上的积分作用,不能很好地反映在空间位置上的风险分布;风险场模型直接计算结果为场强,但不能较好地体现驾驶人驾驶过程的全时域风险,现模型计算缺乏对时-空间综合作用效果的表征,故本文引入信号处理领域时频分析技术对风险作用机制进行进一步揭示,时频分析方法可以计算信号在二维时频坐标平面上在某时刻具备的能量,解决风险场模型在多维度上的计算问题。
然而时频分析技术纷繁多样,针对不同特征的外部信号,存在对应的处理方法。相关研究表明,内含复杂交通风险场景的交通事故多以紧急、短时风险形式呈现[10],该类风险因受人、车、道路多要素协同干扰,呈现出非平稳、非线性的特征,故可将驾驶过程产生的风险视作含局部突变的风险激励信号,针对该类信号主要利用HHT (Hilbert-Huang Transform)对全域信号进行分解变换处理,计算流程如图1所示。
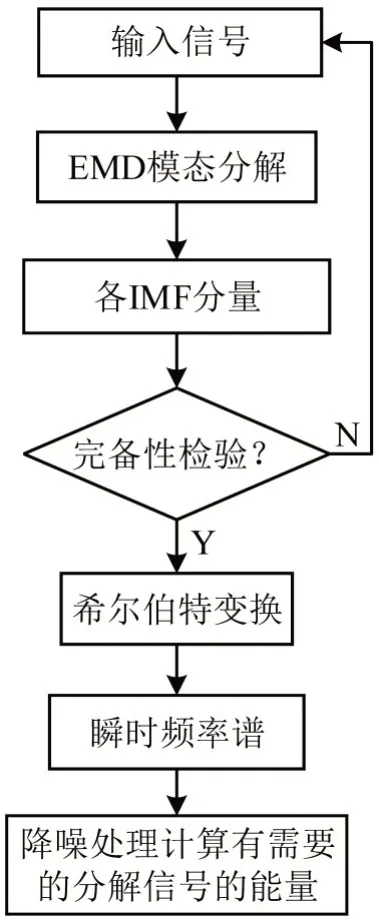
图1 风险能量计算流程图Fig.1 Risk signal energy calculation flowchart
驾驶过程中面对风险,安全驾驶能力薄弱的驾驶人或因预判不足频繁加减速,无法明显区分安全驾驶和风险驾驶阶段,状态识别较为困难,传统研究中对难以识别的状态数据往往不代入模型计算,产生一定误差。而HHT 变换核心是通过EMD(Empirical Mode Decomposition)经验模态分解,将输入信号进行分解得到反映局部信息的分量IMF(Intrinsic Mode Function),再进行Hilbert 变换,得到反映信号实际频率成分的边际谱,驾驶人面对突发风险采取的紧急避险驾驶行为,比如紧急刹车,数据高度振荡,频率表现呈现短时、高频形式,通过边际谱进行识别,从而实现风险信号和平稳信号的区分。
对分解后的信号分别计算各自信号能量,得到驾驶风险能量RPE-Sig (Risk Potential Energy-Signal),即

式中:T为平稳阶段不含局部风险信号的持续时间;T*为局部风险信号的采样持续时间;N为EMD分解后纳入计算的局部风险信号个数;hi(ω,t)为对原式数学处理得到的边际谱,ω为风险信号频率,t为采样时间。EMD要求Etotal(t)可以分解出两个具备正交性的分量,本文提出的风险场模型Ev,包含三角函数cos(x)因子,满足数学意义上的正交分解形式。
故信号能量由两部分组成:第1部分为平稳阶段无风险信号期间具备的风险能量,在驾驶过程中体现为一定时间稳定的车道保持;第2部分为局部突变信号风险能量,反映为紧急刹车、方向盘迅速转向等驾驶操作,从而将风险场综合作用大小计算转化为风险能量计算。
2 基于驾驶模拟的数据采集
当前风险场模型主要应用于车辆跟驰、换道场景,缺乏复杂交通风险场景下的应用,为评估驾驶人面对紧急突发风险的安全驾驶能力,同时检验模型在复杂交通风险场景下的适用性,鉴于驾驶模拟试验在研究紧急突发风险场景下驾驶人反馈具有安全性好、经济性强的独特优势,故招募被试开展驾驶模拟实验。
2.1 试验条件
试验以昆明理工大学自主研发的6 自由度KMRTDS 驾驶模拟系统为测试平台,该系统具有真实车驾驶舱的仿真设备,通过控制实验条件可进行道路交通系统驾驶模拟闭环试验,模拟器数据采集频率为50 Hz。
2.2 被试选取
为了分析不同驾驶人应对风险的驾驶风格倾向,招募45位驾驶人进行驾驶模拟试验,试验要求受试者24 h 内不允许饮酒,12 h 内未饮用功能性、兴奋性饮料,持有有效驾照。最终有效样本39 人(其中28 名男性,11 名女性),年龄均值26.25 岁,标准差4.977;驾龄均值为5.64年,标准差3.74;累计驾驶里程均值26.25 万km,标准差4.97,性别比例及人员数量均满足实验要求[11]。
2.3 试验场景
根据某市发生的一起行人横穿过街碰撞事故深度调查数据,利用事故视频数据和鉴定报告,设计驾驶模拟风险场景,还原事故发生现场,设计动态交通流和行人过街以提高场景逼真度。事故发生路段为平整直线段,含港湾式公交停靠站台,天气晴朗道路能见度良好,符合《城市道路工程设计规范》(CJJ37-2012)。试验路段总长D约为1 km,限速为60 km·h-1,行人横穿碰撞事故发生前约200 m存在侧向变道超车,干扰车加速离去,主车至行人横穿碰撞事故点剩余路段无干扰,场景设计如图2和图3所示。其中Vcar表示驾驶模拟实验的主车速度,Vrun表示行人横穿过街速度。
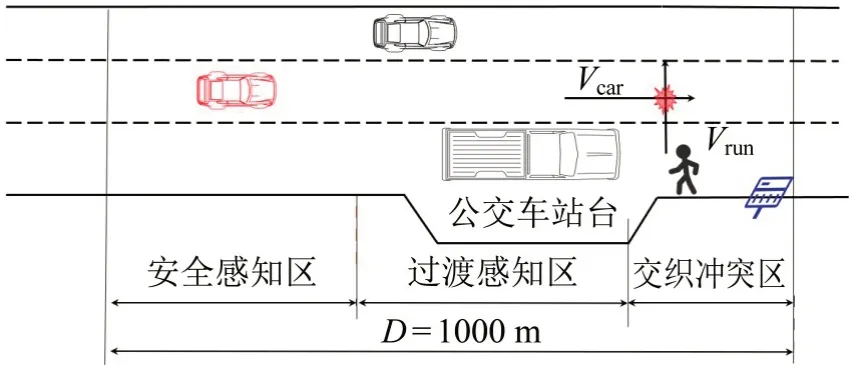
图2 试验研究路段Fig.2 Simulation experiment road section

图3 主车视角下行人横穿过街场景Fig.3 Pedestrian crossing street scene from perspective of main car
2.4 主观问卷调查
在做驾驶模拟实验的同时,利用公安部道路交通安全研究中心发布的《防御性驾驶人驾驶风格自测问卷》通过对驾驶人的安全驾驶意识评测可以得到相应的驾驶风格类型,从主观意识角度考量驾驶人风险预判、安全驾驶常识的理性掌握情况,可以为驾驶人在驾驶模拟试验中面对“真实”风险检验其综合安全驾驶能力提供对照。
2.5 试验数据有效性检验
2.5.1 区域划分
驾驶人在面对外部环境风险的应对过程分为风险感知、识别、操控这3 个阶段且受个体应急反应时长差异的影响。受该思想启发,为充分探究驾驶人在事故发生不同阶段的驾驶行为特征,对试验事故路段按主车行驶方向划分为安全感知区、过渡感知区、交织冲突区,讨论在不同细分区域上驾驶人受外部环境风险影响采取的驾驶行为反馈,具体表征数据为驾驶主车的速度、纵向加速度、方向盘转角幅度,同时也是模型计算主要数据。为了探讨划分区内各表征数据是否具有显著差异性,对其进行单因素方差(ANOVA)分析,置信度为95%,具体如表1所示。
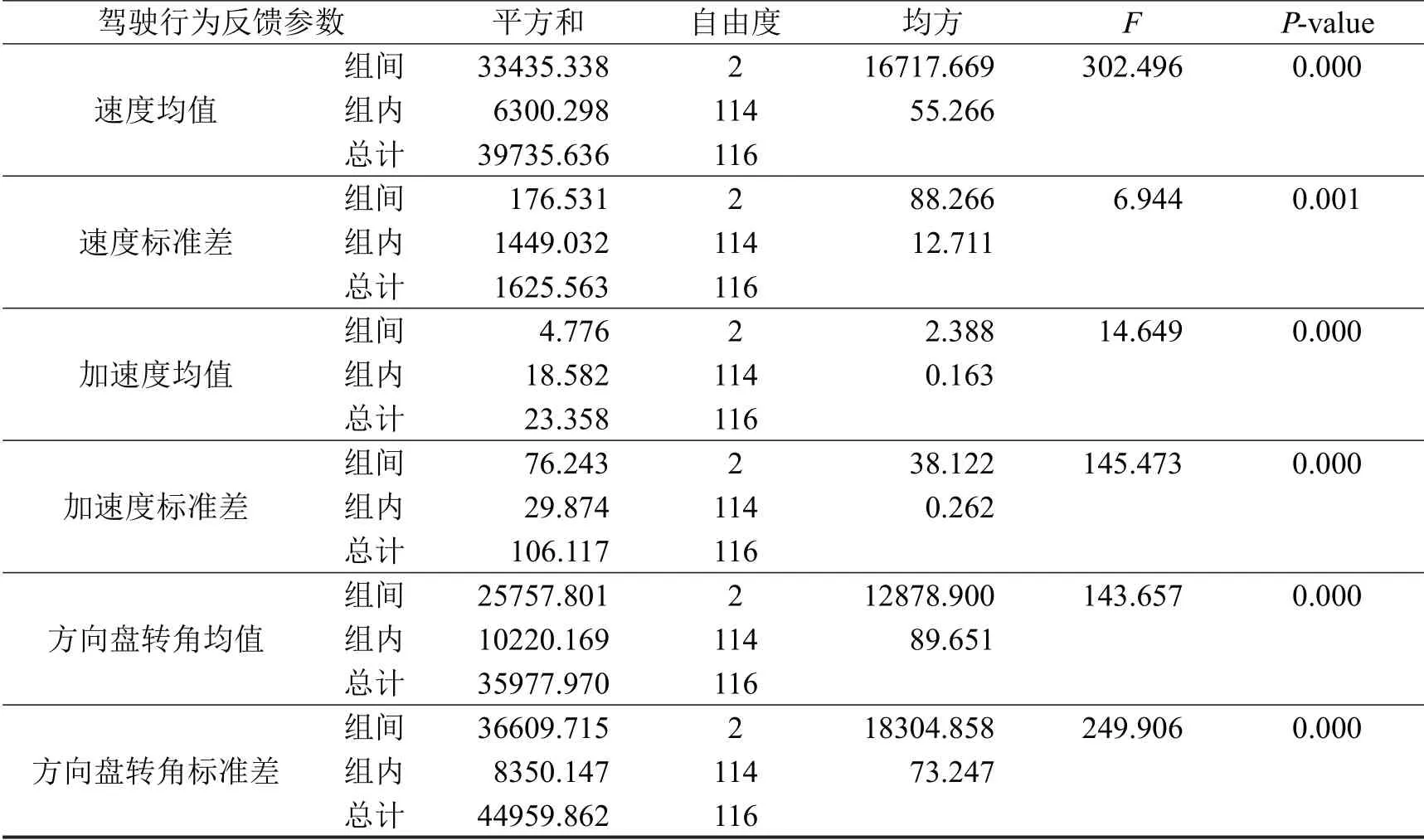
表1 方差检验结果Table 1 Results of analysis of variance(ANOVA)
从表1可以看出,39名驾驶人的各表征数据组间、组内的均方比值F值排序:速度均值>方向盘转角标准差>加速度标准差≈方向盘转角均值>加速度均值>速度标准差,说明驾驶人在各区域速度差异较大,整体平稳性较好;由于行人横穿避让和侧向来车干扰,方向盘转动频繁、转动幅度差异适中;频繁加减速明显,总体而言,各表征数据在3段划分区域存在一定差异,符合统计学规律(P<0.05),说明对研究路段的3段划分合理。
2.5.2 驾驶风格自测问卷信度和效度检验
为保证问卷结果真实可靠,对其进行信度和效度检验,由于驾驶风格自测问卷试题回答采用二分变量“是、否”进行判断,故利用SPSS25.0,采用折半信度进行检验,结果显示,格特曼折半系数等于0.858 >0.7,项总计统计里克隆巴赫Alpha 系数均大于0.8,说明该问卷具有较好的内部一致性。
效度分析即有效性分析,测量方法能够准确测出所需测量对象失误的程度,多采用因子分析方法,选择KMO 和巴特利特球形度检验,KMO 等于0.597 >0.5 ,说明样本量足够,球形度检验P=0.000 <0.05,符合球形度要求,问卷具备结构效度符合因子分析条件。
故问卷通过信度、效度检验,问卷结果可靠。
3 试验结果讨论
3.1 风险能量特性
通过人车路综合风险场模型——HHT 变换将驾驶全过程风险转化为平稳阶段,不含局部风险信号和局部突变信号组合的风险信号能量,用以表征驾驶人在驾驶过程中所遇到的综合风险。这里从空间形态分布和风险演变两方面讨论驾驶人在面对行人横穿紧急突发风险下的风险能量特性。
从空间形态分布角度,图4为主车在安全感知与过渡感知临界区风险能量空间分布,此时主车速度为50 km·h-1,风险能量与物体运动方向垂直集中分布在交通要素周围并向四周按“椭圆形”圈层辐射,文献[12]也验证了此结论,并随物体物理轮廓呈现中心值高边缘低特征。从行人与附近公交车风险交互来看,当两运动物体接近时风险能量在交界处内陷,风险能量增加,公交相比主车小汽车等效质量更大,但由于处于缓慢往站台停靠阶段,故风险能量与“安全感知区”主车风险能量相当。由此可见,模型可以较好地描绘各交通要素在空间上的风险能量分布。
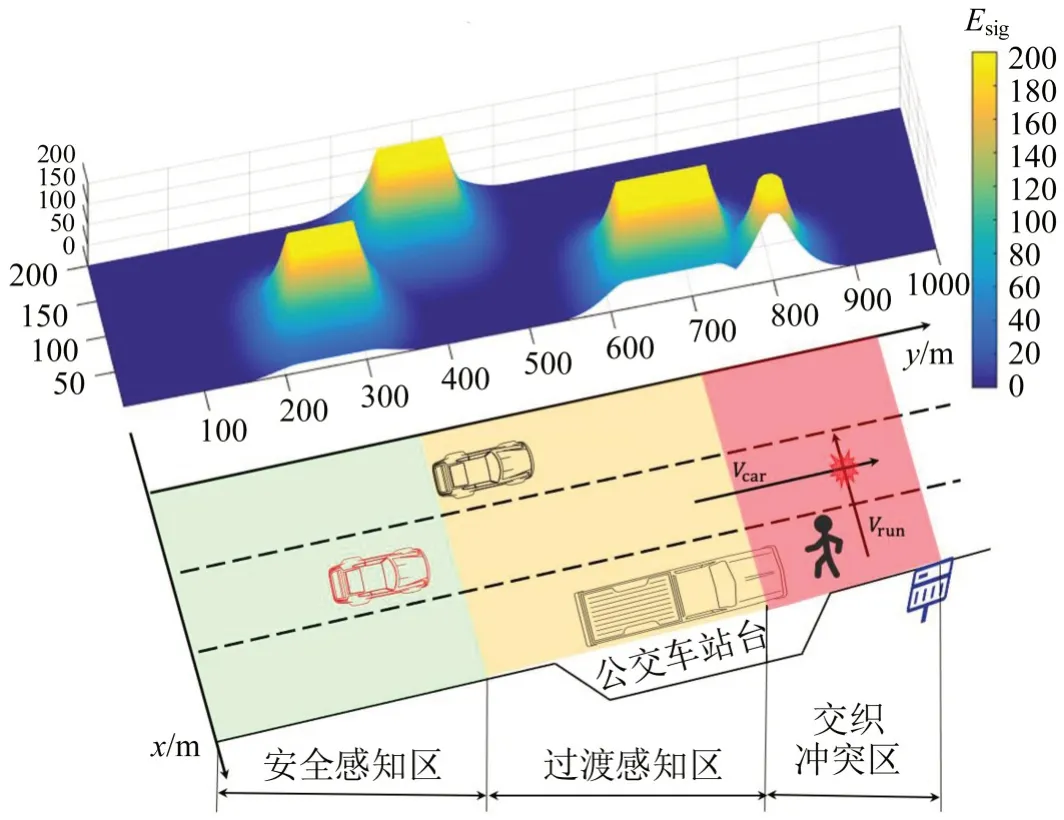
图4 风险能量空间分布图Fig.4 Integrated risk signal energy distribution
从风险演变角度,图5给出驾驶人在“交织冲突区”行人横穿场景下风险能量空间变化趋势。整体来看行人横穿紧急突发风险“爬山式”递增效应显著。主车速度在40 km·h-1左右风险能量达到峰值,人车冲突距离较远时,车速对风险能量影响作用较小,当冲突距离减小至20 m以内时,风险能量陡增,这与行人横穿事故,行人横穿意图不易识别、突发性较高,驾驶员采取紧急避险操作有关,与实际运行特性相符。同时隆起的“尖角”与本次还原事故场景侧向变道来车产生的风险吻合,模型可较好地描述风险在事故演变过程中的变化特性,验证了本文综合风险场模型的有效性。
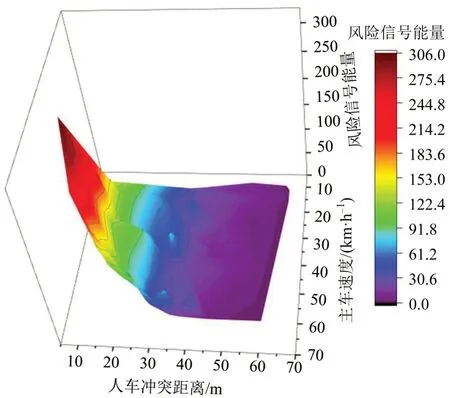
图5 风险能量空间变化图Fig.5 Integrated risk signal energy spatial change
3.2 风险能量与驾驶风格关联性验证
为了统一评价不同驾驶人在面对外部风险时作出驾驶反馈产生的综合风险,对风险能量进行归一化处理,即

式中:Esig-normalization为归一化后的累积驾驶风险能量;Esig-min、Esig-max分别为被试群体中驾驶风险能量最小值、最大值。
风险能量表示统计意义上驾驶全过程中风险的空间累加幅度,反映了概率意义上风险在时间跨度上的积累,得到39 名被试各自累积风险能量频数分布如图6(a)所示。
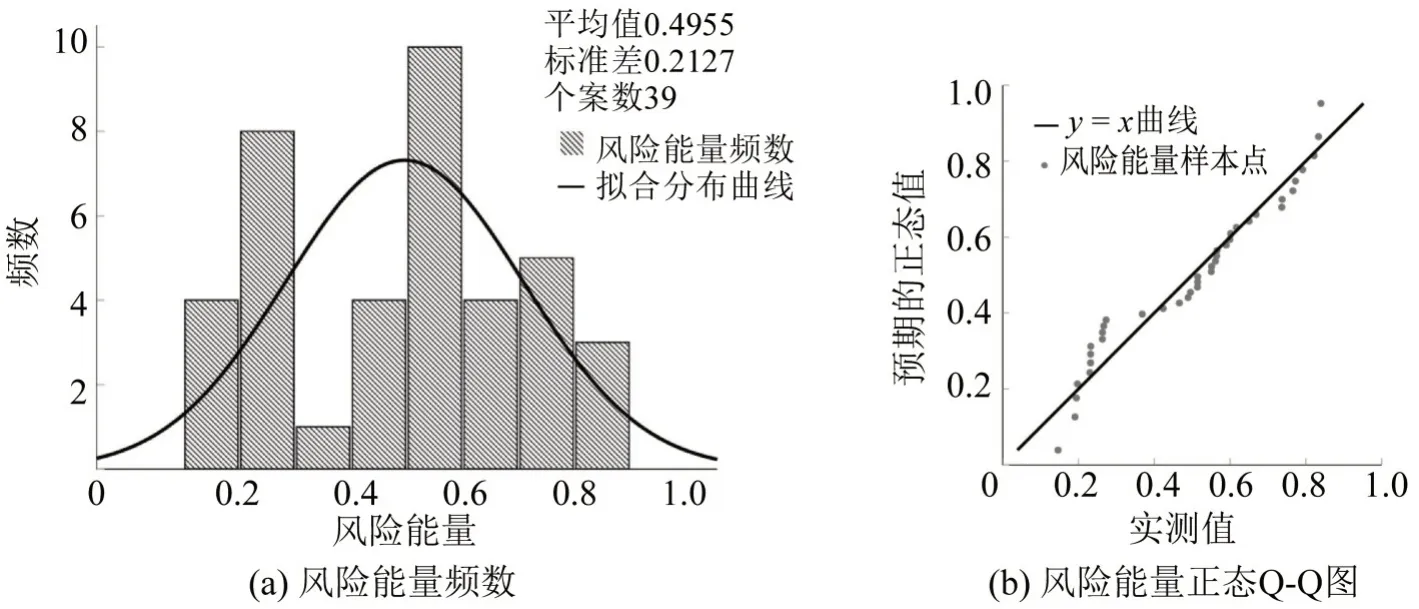
图6 风险能量频数分布Fig.6 Frequency distribution of risk signal energy
从图6(a)可以看出,驾驶人风险能量总体服从正态分布(均值为0.49,标准差为0.21),偏度(Skewness为-0.070)呈现负偏态右偏,峰度Kurtosis为-1.195,图6(b)的Q-Q 图显示数据与对角线较为重合,驾驶人风险能量计算结果符合统计学检验,说明驾驶风险能量可以衡量驾驶人面对外部客观风险采取相应驾驶行为的驾驶安全水平,累积风险能量越高,驾驶安全水平越低,表明其驾驶风格越激进危险,反之则更谨慎安全。
4 基于风险能量的驾驶风格分类
为帮助驾驶人正确认知自我“真实”安全驾驶能力,同时对主观定性驾驶风格分类问卷结果进行定量比对,在已有安全驾驶意识问卷测试的基础上,开展表征驾驶人安全驾驶水平——累积驾驶风险能量的驾驶风格分类,探究安全驾驶意识和驾驶能力之间关系。
4.1 分类算法步骤
驾驶风格作为隐藏在驾驶人体内的深层习性,其风格标签较难获取,目前研究多采用聚类算法进行识别,作为一种无监督机器学习方法,可以从无标签数据中挖掘数据内在层次结构与特征,因此很适用于驾驶风格分类。而其中K-means 聚类算法由于计算效率高,收敛速度快,在数据量较大样本进行聚类时有很好的效果,故采用K-means聚类算法对驾驶风格进行分类。其核心思想是通过迭代把数据对象划分到不同簇中,以求目标函数最小化,使得生成的簇尽可能地紧凑和独立,具体算法步骤如下。
Step 1 设待分类的驾驶人共计n人,将n个待分类的驾驶风险能量分成k个类别,每个类别为一种驾驶风格类型,聚类类别表示为

式中:Ci为第i个类别;1 ≤k≤kmax,kmax为驾驶人的驾驶风格总类别数。
Step 2 随机选取驾驶风险能量m作为聚集中心,表示为

式中:Li为聚集中心;lm,i为第i种驾驶风格群体的任意驾驶风险能量m。将所有驾驶风险能量离散点投影到二维坐标图像中,用于离散点与其相邻的离散点之间的距离计算。
Step 3 计算离散点m与其相邻的离散点之间的欧氏距离,即

式中:dm,m+1为离散点m+1 到m的欧氏距离;(xm,ym),(xm+1,ym+1)分别为相应的坐标。
Step 4 重复Step 2~Step 3,重新选择聚集中心并计算聚集中心与其相邻的离散点之间的欧式距离,直到遍历完n个离散点。
Step 5 根据欧式距离的大小判断被试驾驶人群体任意离散点与其相邻离散点的相似度,相邻的离散点之间的欧式距离小于设定的阈值,表明两者具有相同的驾驶风格类型;否则,表明两者驾驶风格不同。
4.2 分类模型评估
K-means聚类算法中簇(K值)选取成为影响算法计算结果可信度的关键因素,故进行算法有效性验证,拟选用内部有效性指标误差平方和SSE(Sum of Square Due to Error)、CH 系数(Calinski-Harabasz Index)、戴维森堡丁系数(DBI)、轮廓系数SC(Silhouette Coefficient)对K值选取进行评价。评价结果如图7和表3所示。
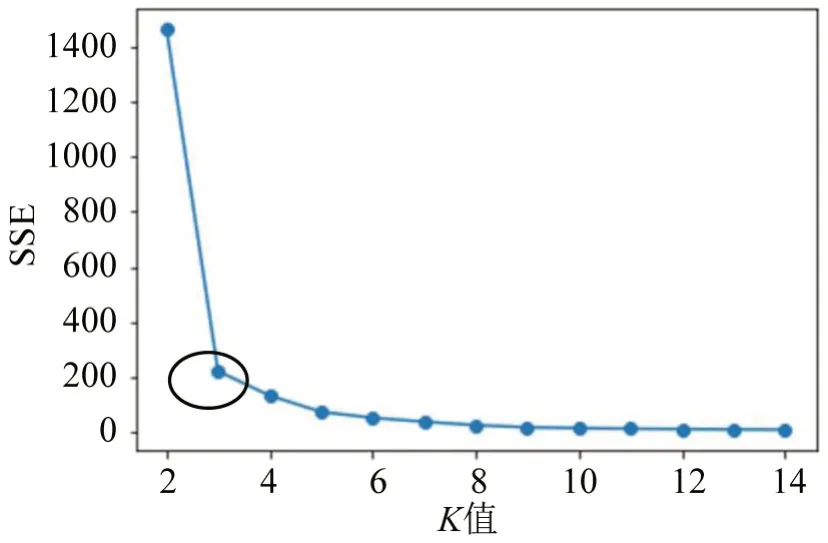
图7 SSE指标簇评价Fig.7 SSE cluster indicator
图7表示,当簇K=3 时,图像出现“肘型”图线曲率最大拐点下降率突然变缓,结合表2轮廓系数SC指标,簇K=3 时取值最大,表征此时聚类“内密外疏”效果最好,DBI 系数表示每个簇类最大相似度均值,取值越高表示该簇相似度越好。
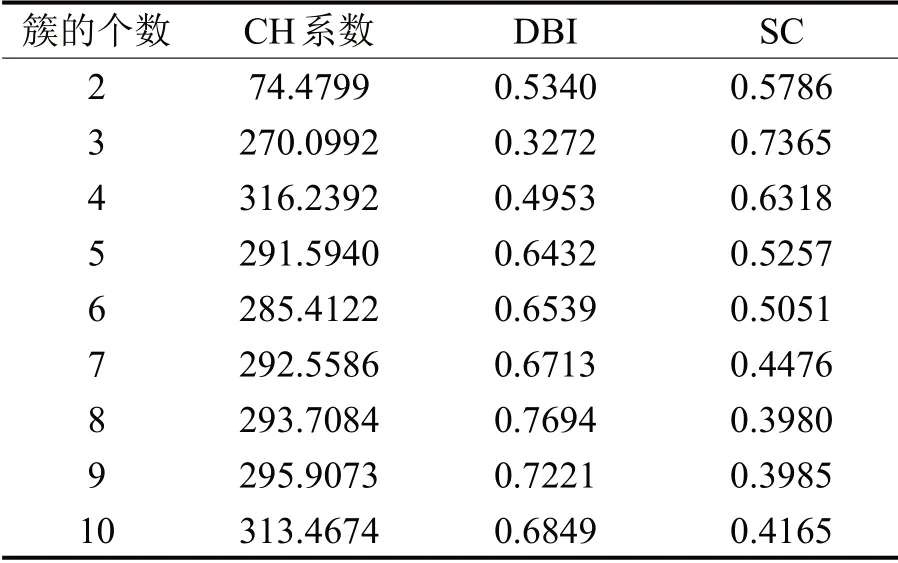
表2 不同指标下簇的聚类效果Table 2 Performance evaluation under different cluster indicators
4.3 主客观分类结果一致性分析
通过对驾驶人应对外部客观风险采取措施得到的驾驶风险能量聚类,可以得到不同驾驶风格属性的群体划分,如图8和表3所示。
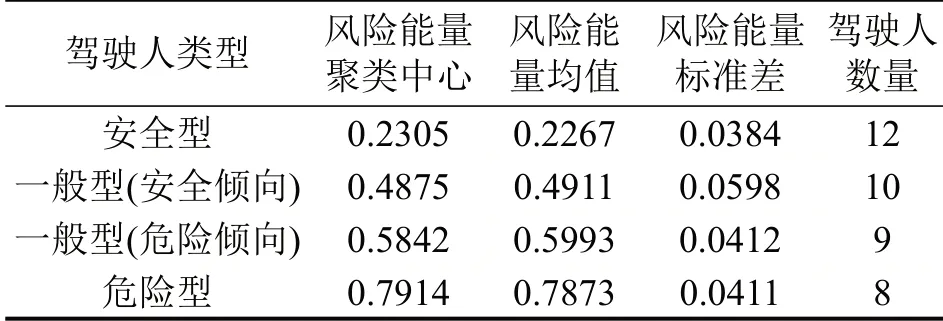
表3 驾驶人聚类结果Table 3 Results of driver clustering
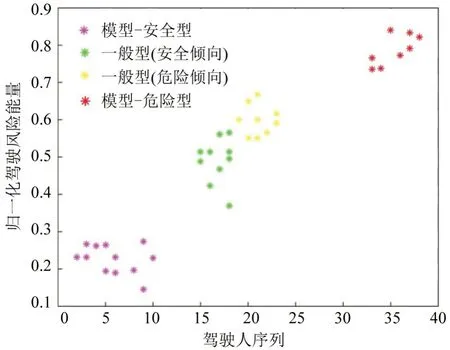
图8 39名驾驶人聚类图Fig.8 39 drivers clustering
从聚类图可以发现,驾驶类型划分为3类时较为直观,与问卷结果具有一致性,即危险型、一般型、安全型,但表征分类数据组内与组间距离差测度的CH 系数,值越大表征分类效果越好,在K=4时取最大,说明量化分类结果存在进一步划分的可能。面对行人横穿风险场景,有一定驾驶经验的驾驶人在临近公交站台会进行风险预判主动减速,故在模型中累积风险能量值会降低;而缺乏这类场景风险预判能力的驾驶人通过瞬间减速,猛打方向盘等紧急避险操作,因方向盘操作获得风险补偿,累积风险能量增加。结合驾驶人风险驾驶行为分析,故对分类结果进行调整,即问卷判定为“一般型”驾驶人群体可以进一步细分为“一般型-安全倾向”“一般型-危险倾向”两类,共得到4类驾驶风格划分的定量阈值,问卷和模型分类结果对比如表4所示。
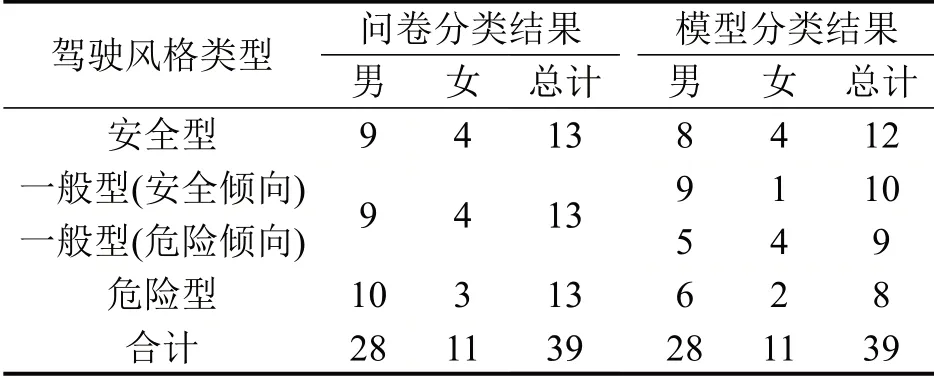
表4 问卷调查与模型计算分类结果对比Table 4 Comparison of classification results
试验前填写的问卷主要反映驾驶人的理性知识掌握情况,体现驾驶安全意识水平;驾驶模拟仿真试验考察驾驶人在面对真实事故现场还原风险场景时采取的驾驶行为,体现安全驾驶能力,通过问卷和模型计算分类一致性对比分析,如图9所示,得到“问卷安全型-模型危险型/危险倾向”“问卷危险型-模型危险型/危险倾向”等4 类危险人群应进行重点监测提醒,开展安全驾驶能力综合提升训练。

图9 驾驶人分类流动Fig.9 Driver clustering flow
“问卷安全型-模型危险型/危险倾向”,总计13名安全意识较高驾驶人,有5名安全驾驶能力存在不足,风险能量均值0.687∈[0.5993,0.7873],这类驾驶人容易出现“自我感觉”良好,麻痹大意等不良驾驶心理,误将驾驶安全意识等同于安全驾驶能力,安全意识问卷评测在环境压力较小的情况下,驾驶人能够保持高度理性,而真实驾驶环境压力较大,驾驶人遇到紧急风险在高度紧张的环境下会出现非理性行为致使“知道却做不到”的情况发生。
“问卷危险型-模型危险型/危险倾向”,总计13名安全意识较低驾驶人,有8 名安全驾驶能力较弱,风险能量均值0.791>0.7873,这类驾驶人属于“双危型”,安全驾驶综合能力急需提升,同时部分意识较低的也有较强的安全驾驶能力(3/13),发现这类驾驶人的驾驶年龄较长(平均驾龄9.5年,大于样本均值5.64)、驾驶里程较远(平均里程28 万km,大于样本均值26.25 万km),拥有较为丰富的驾驶经验,提供了较强的安全驾驶能力。
故开展“问卷自测-综合风险场风险能量计算”方法可以较好地评估驾驶人的综合安全驾驶能力,对需要开展安全驾驶能力提升的人群进行精准识别,为安全驾驶意识转化为安全驾驶能力提升提供一套可操作、可验证的评估量化方法。这也在一定程度上表明,综合风险场模型在人-车-路-环境交互的交通系统中所体现的驾驶人风格辨识较为真实。
5 结论
本文建立了考虑驾驶风格因子的综合风险场模型,利用驾驶模拟试验采集数据分析,得到的如下结论:
(1)从空间形态上看,风险能量与物体运动方向垂直集中在交通要素周围并按“椭圆形”圈层辐射,当两运动物体接近时,在物体轮廓交界处内陷,风险能量增加,沿物理轮廓呈中心高边缘低分布。从风险演变过程看,驾驶人在面对行人横穿这类突发性较强的风险,在“交织冲突区”的风险能量呈“爬山式”递增效应,当人车冲突距离减小至20 m以内,风险能量陡增,在速度为40 km·h-1达到峰值,表明模型可以较好地反映驾驶人面对紧急突发风险下的风险特性。
(2)量化改进了问卷从安全意识角度得出的人群划分,对风险能量聚类得到“安全型”“一般型-安全倾向”“一般型-危险倾向”“危险型”这4种驾驶风格类型,表明不同驾驶人的安全驾驶能力存在细致差异,两者分类结果对比发现,驾驶人存在“认知-操纵”偏差,即安全意识与驾驶能力不匹配(问卷安全型-模型危险型/危险倾向),也存在安全意识淡薄但驾驶能力强的人群(问卷危险型-模型安全型/安全倾向),这类人群有着较长的驾驶年龄和较远的驾驶里程,补偿了安全意识薄弱对驾驶能力的影响。
猜你喜欢
小学科学(学生版)(2020年1期)2020-01-19
铁道通信信号(2019年6期)2019-10-08
中华诗词(2017年4期)2017-11-10
雷达学报(2017年6期)2017-03-26
中国建筑装饰装修(2017年1期)2017-02-13
都市丽人(2015年2期)2015-03-20
创新作文·初中版(2015年1期)2015-03-11
电子设计工程(2015年6期)2015-02-27
中国火炬(2014年2期)2014-07-24
创新作文·初中版(2014年5期)2014-07-18