
关于工业机械手概念设计关键技术的分析
2021-12-30 07:07:16赵竹强
橡塑技术与装备 2021年24期
赵竹强
(山东百特电机电器有限公司,山东 烟台 265718)
0 前言
工业机械手属于机械技术与电子技术融合的产物,其被广泛应用于高新产业之中,发挥着极为重要的作用,能够大幅提升生产效率与产品质量,实现工业生产的标准化管理。因此,工业机械手的设计成为解决工业生产的关键,在实际的产品设计中必须要掌握关键技术,切实提升设计的专业性、技术性和功能性,使其应用的适用性得到提升。同时,工业机械手作为技术融合的产物,覆盖了机械设计、气动设计及电控设计,因此是一门持续发展的尖端科技,其概念设计关键技术将成为重要的拓展渠道,值得重点关注和深入研究。
1 工业机械手及概念设计
1.1 工业机械手
目前来看,工业机械手得到了广泛的青睐和应用,其作为一种传统机械技术与现代电子技术的融合,具有较高的科技含量,主要用于生产密集型产品之中,并且随着产品制造要求的不断变化,其将逐步面向智能化发展格局,帮助企业实现生产的自动化和管理的智能化,以现代先进生产技术替代传统的人力操作,为工业领域的可持续创新发展提供驱动[1]。具体而言,工业机械手灵感源于人体上肢的运动和功能特征,其动作主要由信息参数的输入实现控制,管理中比较简单便捷,可在复杂的环境下实现标准化操作。由此,使工业机械手的应用领域逐步扩大,同时也对其设计工作也提出了更高要求。
1.2 概念设计
该理念于1984年由帕利和拜茨(Palh&Beitz)在其所著的《工程设计》中被提出,经过数十年的研究、创新和发展,对于概念设计的界定也更为清晰,即:在确定任务后,通过抽象化,拟定功能结构,寻求适当的作用原理及其组合等,确定出基本求解路径,得出求解方案。总体而言,概念设计旨在依据产品生命周期中各阶段要求,实施产品功能的分解、创造及实现等,从而生成最佳的设计方案,完成产品生产的可行性求解,构建完善的产品及系统设计方案。事实上,概念设计的核心在于设计发散与创新的过程,在设计中不断直面问题求解,竭力满足技术目标、经济目标和应用目标,实现设计方案的优选,体现出较强的艺术性、综合性、创造性及经验性等特征。
2 工业机械手概念设计的关键技术
伴随工业技术的发展,依托工业机械手概念设计的要求,主要涉及系统化设计、结构模块化设计、产品特征知识设计、智能化设计等关键技术[2]。并且,各种概念设计之间并非完全孤立的,而是在不同的阶段产生联系,全面保障产品的设计质量,使之具备更高的应用价值。
2.1 系统化设计
系统化设计是工业机械手设计的基础,也是实现其功能的核心部分,系统化设计的特点是利用设计视为若干设计要素所构成的完整系统,且各设计要素之间具有独立性,能够实现要素间的广泛联系和体现明确的层次性,当所有要素结合后便可实现具体的操作任务。
2.2 结构模块化设计
所谓结构模块化设计是先进的设计方法,即在定义设计任务后对其实施分解,充分考虑各任务之间对产品的功能,针对各部分之间的协调问题求解,如此便可以在规范阶段消除设计中存在的矛盾,实现生产能力、费用支出的早期预测,确保在开发设计中具备可调整性,以此提升产品设计的效率与可靠性,全面实现产品设计成本的控制。
2.3 产品特征知识设计
其特点是基于计算机对语言描述的识别能力,获取产品的特征及设计领域的专业知识及经验,对应地建立知识库及推理机制,再结合该领域现有的知识实现辅助推理,以更好地实现设计方案的验证与判断,优化工业机械手的整体设计方案。
2.4 智能化设计
智能化设计主要基于设计方法学理论,依托现代科技与软件技术,如三维图形软件、智能化设计软件、虚拟现实技术等技术,以及应用多媒体、超媒体等实施产品开发设计、产品构思表达及产品结构描述,以实现对产品设计的智能化,使工业机械手能够更适应现实生产及未来发展需求。
3 工业机械手概念设计的应用分析
3.1 结构设计
基于工业机械手设计的基本方法,其结构一般采取模仿工人搬运的方式,对工业机械手的动态功能实施设计,通常由底座、大臂、小臂和爪子等主要部分构成,具体形态如图1所示。
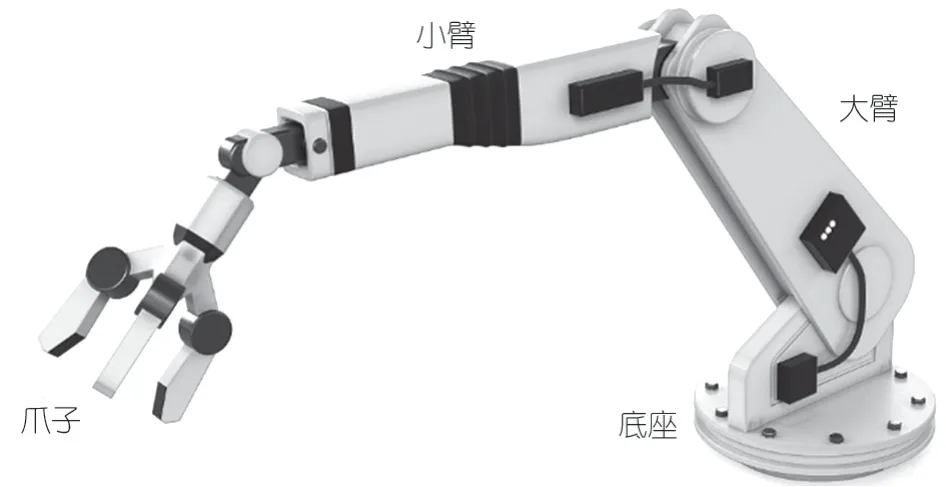
图1 工业机械手结构
从工业机械手的结构看,底座属于其基础部件,一般发挥着其余各部件的承载作用,如执行机械及驱动系统等,都由底座实现支撑及连接。大臂则通常直接与底座相连接,同样是承载重力的主要结构之与,其功能是带动机械手爪抓取产品,再依据操作预定轨迹运动,完成产品的位移或者安装工作。小臂则是连接爪子和大臂的部件,以调整抓取姿势及方位功能为主。爪子采取回转型夹持式结构设计,由于其结构相对简单,具有制造简便、摩擦力小及动作灵活等特点。
在工业机械手的整体设计思路上,一般采取多个自由度设计,并基于PLC系统来实现控制气压换向阀,使气压系统执行机械生成不同的动作,进而实现其上下摆动、抓放动作及旋转功能。具体工作方式如下:
(1)大臂主要依赖于内部的气压缸推动,以保证大臂能够完成各种动作。
(2)小臂的作用机制与大臂类似,同样是利用内部气压缸的推动,实现对爪子的控制,以完成相应的抓取动作。
(3)机械爪则是依赖小臂所传导的控制力,实现对物体的夹放作业。
(4)在完成动作后,大臂在气压缸的作用下,完成快速的归位。
(5)底座则是完成支撑及旋转作用,确保工业机械手可以指向不同的方向。
(6)大臂在气压缸的作用下两次重复动作,循环上述机制。
3.2 气压驱动系统设计
工业机械手设计需要依据其功能特点来实现,尤其是执行机构需要利用气压系统作为驱动,完成张开、夹持等动作,并且需要利用系统的协调控制,使底座旋转、大小臂伸缩实现协调或者同步,在操作的过程中要求平稳缓慢,空载时要求快速运动,这些均需要利用PLC控制系统完成控制,其结构如图2所示。

图2 工业机械手气压驱动系统
结合其系统工作原理,其主要构成分为气压发生装置、控制元件、执行元件及辅助元件等构成。其中,气压发生装置即利用远动机所输出的机构能转换为空气压力,以空气压缩机为主,使工业机械手气压缸具备相应的压力值,并作用于工业机械手;控制元件主要是对压缩空气的压力 、流量及流向实现控制,以确保执行元件能够依据相应的输出力及参数设计正常运行,通常由压力阀、流量阀、方向阀等协同完成;执行元件则主要是能量转换装置,如气缸、马达等元件;辅助元件由是帮助执行的相关元件或装置,包括过滤器、干燥器、空气过滤器、消声器、油雾器等构成。比如,当气压驱动系统启动时,由C、B等部分完成协同伸臂动作,在抓取物品时则结合A进行,在抓取完成后再反向动作提升物品,再由D进行方向旋转,在放置物品时则按照相反的方向操作控制。
3.3 PLC控制系统设计
PLC控制系统属于当下主要的工业机械手控制系统,其能够依赖于各类控制技术,完成对工业机械手操作的全面控制,使之能够满足工业生产条件。一般而言,PLC控制系统可以具备如下控制能力,即顺序控制、运动控制、过程控制、数据控制及通信控制。而从PLC控制系统的结构来看,主要由中央处理单元(CPU)、存储器、输入/输出模块、电源模块、接口模块、通信接口、编程器及其他等部分构成[3]。
根据工业机械手的控制要求,在设计中必须要做好各部位的控制协同设计,以工业机械手的生产操作需要,对各类设计参数加以调整优化,以达到最佳的控制效果,确保工业机械手启动后能够流畅地由起始动作延续至结束动作,具体控制流程如图3所示。
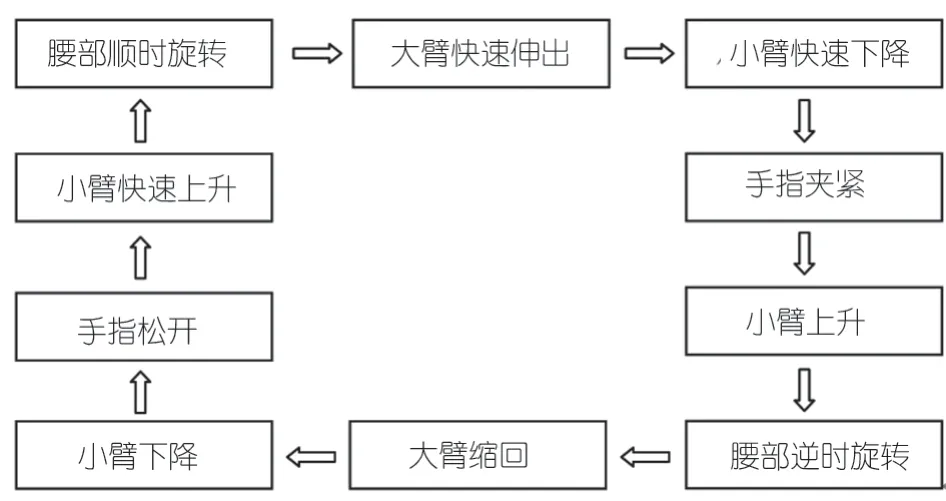
图3 工业机械手操作流程
4 结语
综上所述,伴随工业科技的迅速发展,对工业机械设备的设计要求愈发提高。因此,在工业机械手的设计中,必须要针对其应用的实际情况,在概念设计中解决好生产矛盾和问题,选取最佳的设计方案,从而保证工业机械手最大限度发挥作用。同时,从具体的设计来看,必须要以结构设计、气压驱动系统设计及PLC控制系统设计,通过主要功能的完善和设计优化,使其能够具备更大的拓展空间,实现适用范围大、定位精度高、产品刚度好及控制灵活等特点,满足未来工业生产的需要。
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:12
建材发展导向(2022年20期)2022-11-03 01:07:04
环境技术(2021年4期)2021-09-11 08:26:06
建材发展导向(2021年7期)2021-07-16 07:08:06
文艺生活(艺术中国)(2018年11期)2019-01-03 08:42:18
载人航天(2016年4期)2016-12-01 06:56:21
通信电源技术(2016年1期)2016-04-16 04:57:29
工业设计(2016年11期)2016-04-16 02:44:16
机电信息(2015年3期)2015-02-27 15:54:53
综合智慧能源(2014年1期)2014-09-10 07:07:40
