
基于无人机影像的输电线路监测数据可视化模型
2021-12-30 03:06国网山东省电力公司泰安供电公司
电力设备管理 2021年12期
国网山东省电力公司泰安供电公司 陈 强
随着智能电网的建设推进,在接入电力系统的业务数据数量逐渐增加,对电力系统的有效管理造成了较大的安全隐患,一旦其中某个业务板块出现数据故障会严重影响电力系统的运行,造成巨大经济损失。原有电力运行监测对故障点缺少实时性,基本采用后补式处理方法,在逐渐扩大的电力规模下较为单一态势分析,无法满足现下电力系统的运行维护。可视化能将简单的符号描绘转换成具象化的集合描述,在信息处理过程中提供更便于理解和记忆的图像。在科学手段越来越成熟的发展下,利用无人机进行影像获取,能等效还原预测区域与实测信息的精准关系,在像控点数的帮助下几乎不会在平面或立体空间内造成差别影响。
在国外发达国家早已完成了无人机可视化平台的研发,具备三位一体的数据处理和制图分析功能,能将海量的复杂数据进行多方位展示。国内对无人机技术的研究起步较晚,通过资源三号卫星的发射至此开启高分辨率立体测绘的新时代,以无人机为载体的基础上,在军事和航天领域完成了多个定位目标和跟踪任务。本文在无人机影像基础上对输电线路检测数据建立可视化模型,用于大量电力数据的逻辑化图形展示,加强对数据信息的接收和表达,为电力行业的安全发展提供可靠依据。
1 基于无人机影像的输电线路监测数据可视化模型
1.1 无人机影像定位输电线路坐标
根据无人机航飞的特点,在保证其能够完成加速起飞后,对需监测的输电线路进行区域划分,使无人机发射和回收的场地不受到空间限制,以此定位能够接收数据的航拍坐标[1]。一般其发射的主要方式包括滑跑和弹射两种,在配套设施较少地段可进行滑跑,加载所需速度负载较小,能在比较简单的操作下完成安全飞行。在完成起飞任务后对需测量的地域进行坐标系划分,主要为两大类,一是用于拍摄点位描述的位置,称为像方位空间坐标,另一类是描述地面对应点位的位置,称为物方位空间坐标。像方位空间坐标由像平面坐标、空间坐标以及辅助坐标构成,通常用右侧坐标表示像点在像平面上的位置,实现像与物空间相对过渡性的统一[2]。物方位的空间坐标由摄影与地面测量坐标系组成,主要是在点位反方向平移中将监测物投影至坐标系中,实现实际测量与地面测量的过渡性转换。在定位坐标设置完成后,确定投影光束的瞬时位置以描述各类投影图像的空间姿态,需要包括三个直线元素和角元素,便于图像产生误差后及时进行校正。
1.2 畸变差校正影像匹配监测数据
受无人机低空航行的误差取像影响,在传感器发生的影像中会产生畸变,所得结果和实际监测数据无法完成匹配,需要进行相机内部的方位参数校正[3]。通过确定畸变来源分类完成不同状态的校正方式选取,基本上有系统和随机误差两种,有视频转化为数字影像的错位或影像奇数行和偶数行的错位引起。在相机主距和线路坐标(xi,yi)中定位,以共线方程为误差校正计算方式:

式中:实际产生畸变的定位变量用q 表示,主点不动剩余定位点的畸变量用p 表示,在未知动量坐标系中若影响畸变过大,可加入改正差值进行替换[4]。当影像主点无需向远离点方向移动时,表示该影像畸变误差校正完毕能够找到对应定位坐标,完成输电线路中数据的监测相匹配。
1.3 场景裁剪构建可视化模型
可视化就是在科学计算基础上对多维的数据空间完成结构输出的抽象转化,利用计算机自带的支持工具和手段使监测到的数据更直观地表达。为加强拍摄画面的渲染气氛利用场景裁剪的方法,对只出现在相机视景体中的影像和场景进行更新,保留树结构中远近加载不同数据的分辨率。在可视化过程中需对数据包围的结构进行比较,判断出现在相机视景体中的数据类型,进而删除掉不在远景可见区域的三要素[5]。对不可见区域需进行背面和视景体裁剪,相对于相机视角来讲,在沿视点出发的线路上观测到的场景面片,若面片顶点顺序为逆时针走向则视为正面,若顶点走向沿顺时针排列为背面。其次若面片中的一个侧面被遮挡需对另一面进行删除,保留裁剪过程中光影阶段的面片图像。至此在定位输电线路坐标和校正畸变误差的基础上,利用场景裁剪对线路数据进行整合,完成监测数据可视化模型的构建。
2 实验结果分析
2.1 实验准备
为验证此次设计的可视化模型具有实际监测效果,采用实验测试的方式对输电线路中即时容灾数据进行监测,选取某省多条常态运行下的输电线路,将其在实际输电过程中产生的20万组数据进行备份,其中包括6000组容灾运行异常现象。将复制好的运行状态在搭建的测试平台中进行监测,在实验开始前需对无人机进行参数选取,并将标定位置作出设定,具体参数如下:型号。大疆Pro 自带镜头;影像分辨率。宽高3:2比5742×3846、宽高4:3比4648×3486、宽高16:9比5742×3406;有效像素2000万;机械与电子快门速度。6~1/2000s、6~1/6000s;适宜工作温度40℃以下;传感器类型CMOS1英寸。
此次选取的无人机能够完成自动对焦和拍摄功能,在MATLAB 相机标定工具箱内进行输电线路的定位盘位置标定。在导入所有拍摄图像后选取影像焦点,共得到拍摄图像32张,其中8张图像被拒绝无法参与标定,在剩余24张图像中分列出8个控制坐标点,进行输电线路容灾运行的异常数据监测。
2.2 可视化监测过程
此区域输电线分布较为分散,在对测试区进行航拍飞行时仅采用一个角度无法定位全部坐标点,分别对传输至总线路的输电子站进行多角度结合控制,以保证此时实验测试的精准度。航高设置为150m 高度,输电线分辨率可以到5m,航向与旁向重读率在65%以内,通过垂直摄影和三个角度的倾斜摄影完成测试点的坐标位置布控,测量比例为1:2000,8个点位具体位置(X/Y/Z 轴)分别为:5052.21/1724.06/243.23、5055.42/1731.14/245.07、5058.16/1735.24/259.34、5062.03/1742.15/261.31、5065.54/1745.31/254.52、5054.23/1726.18/254.96、5067.42/1732.46/261.37、5072.38/1734.62/264.06。
根据控制点坐标分布走向,对布控位置进行实际区域的测量图像标记,受控制点必须保证三张以上图片的原则,此次坐标位置选定方案完全符合,不需要进行剔除和刺点。如图1所示,在多条输电线路监测图像拍摄中,设置的标定坐标系基本处于相片内,每一个相控点均可以多个相连点位组成连线。提取备份数据进行坐标点位分配,在每组坐标中安置15000组电力数据,所有容灾异常数据会均匀分布在各组数据中。
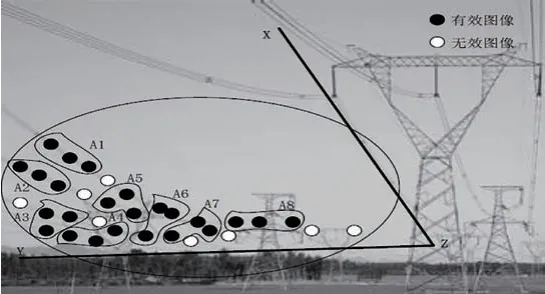
图1 输电线测试区域影像标定显示
2.3 异常数据结果分析
为进一步验证本文模型能够在容灾现象发生时全面监测异常数据,引入两组传统模型进行对比,监测时间控制在5min 以内。在各组定位坐标电力数据中异常数据为500组,分别对每组坐标进行监测,8个点位的本文模型、交互模型、DNS 网络模型分别为:500/412/438、499/415/450、500/472/459、500/426/461、499/425/454、500/433/454、500/422/434、500/470/462。据此可知,本文设计的模型在容灾现象发生时,基本全面覆盖点位坐标完成异常数据检测,两组传统模型对异常数据的监测平均为434组和451组,较本文方法少了66组和49组。综合结果来看,本文模型能在输电线路发生容灾现象时完成区域坐标点位布局,并完成基本异常数据的监测,维护输电线路的稳定运行。
综上,由于研究时间和能力有限在整个过程中存在些许不足,如在无人机航行线路较低时,对像控点的布设和测量能够形成精度指标没有提出假设和研究,无法确定在精度变化较大情况下能够在实际测量场地完成工程作业。后续会对低航线飞行期间的线路进行有效绘画,按照实际测量区域的走向进行像控点布设,选取更精准的比例尺度,对具体数据进行具体分析,加强电力数据可视化模型的深入研究。
猜你喜欢
世界科学技术-中医药现代化(2022年3期)2022-08-22
师道·教研(2022年1期)2022-03-12
海洋信息技术与应用(2020年1期)2020-06-11
中国交通信息化(2019年12期)2019-08-13
传媒评论(2019年4期)2019-07-13
摄影之友(影像视觉)(2017年10期)2017-11-07
电子制作(2017年10期)2017-04-18
河北电力技术(2016年5期)2016-12-16
中国市场(2016年45期)2016-05-17
癌变·畸变·突变(2014年2期)2014-03-01
