
基于姿态传感器和发光点的手持示教器设计*
2021-12-29 00:58:24潘海鸿杜晓枫杨竑宇陈旭红梁旭斌
组合机床与自动化加工技术 2021年12期
潘海鸿,杜晓枫,杨竑宇,陈旭红,梁旭斌
(广西大学机械工程学院,南宁 530004)
0 引言
在制造业自动化、智慧化的大力发展下,工业机器人在焊接、码垛、搬运中得到广泛的应用[1]。在机器人执行新的生产之前,都需要对机器人进行示教[2],示教方式通常分为在线示教和离线示教。在线示教由人工引导机器人末端实现示教,示教过程繁琐[3-4];离线示教需要构建工件和机器人精确的三维模型和两者之间相对位置关系,相对位置出现偏差时会极大地影响机器人的复现精度[5];这两种示教方式在调试和测试阶段花费大量时间,严重影响工作效率。
为提高机器人的示教效率,科研工作者开展了许多对示教工具的研发工作。Zhang X等[6]使用人手作为示教工具,通过双目视觉识别手的位置,实现机器人的手部运动跟踪,但是该方法无法识别手的方向,因此无法实现姿态的示教。为解决姿态角的示教问题,应再恩等[7]设计一种贴有标志点的示教工具,通过示教跟踪实现任意轨迹的示教。倪自强等[8]通过双目视觉系统识别和提取特定的示教工具末端位姿实现示教。这两种示教工具的姿态信息需要通过特征点解算,且特征点的识别易受环境光影响。Lin H等[9]设计一种使用发光Mark点(主体结构为三个发光点)的示教笔作为示教工具,通过双目示教识别发光Mark点信息,将示教笔的笔尖位姿信息转换成机器人的位姿信息实现示教,降低环境光对发光Mark点的影响。
为解决现有示教工具姿态角需要解算的问题和降低环境光对特征点的影响,本文设计基于双目视觉系统的具有姿态传感器和发光点的手持示教器。手持示教器通过姿态传感器和发光点实现示教,引入姿态传感器,可以直接测量手持示教器的姿态角;引入单个发光点,通过双目视觉可以测量得到手持示教器的位置,双目视觉仅需要识别和匹配图像中的一个发光高亮点,不仅可降低环境光对特征点识别的影响而且还可以降低图像处理难度。
1 双目视觉下的手持示教器坐标变换
1.1 位姿变换原理

(1)
(2)

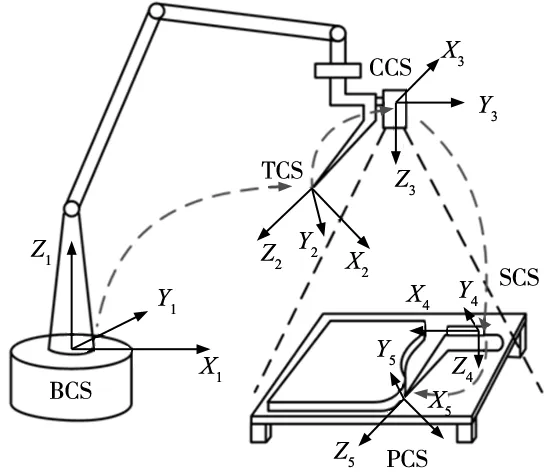
(a) 示教原理
(b) 位姿变换原理图1 双目视觉下的手持示教器坐标变换
1.2 建立手持示教器与双目视觉坐标系关系

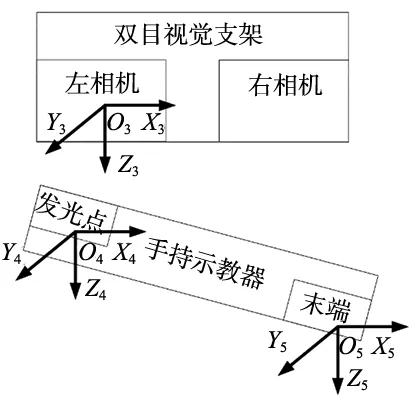
图2 双目视觉下的手持示教器坐标系
(3)
式中,θ1、θ2、θ3分别为发光点坐标系绕双目视觉坐标系X、Y、Z轴旋转角度。
(4)
(5)


(6)
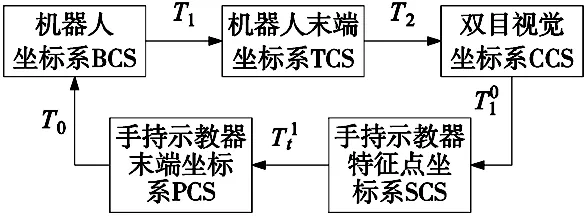
通过式(1)和式(6)可以将手持示教器末端坐标系转换到机器人坐标系。使用手持示教器对示教点进行示教,计算得到该点在机器人坐标系下的位置和示教角度,从而引导机器人末端实现复现。
2 手持示教器结构及标定
2.1 手持示教器的结构

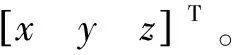
1.传感器 2.发光点 3.可更换的末端 4.外壳图3 手持示教器结构
2.2 标定手持示教器发光点和末端点的相对位置
(7)
3 实验验证
3.1 实验平台
为了测试手持示教器的示教精度,搭建手持示教器精度实验平台。平台包括手持示教器、双目视觉、测试平台(包括标定板和其下面的验证板)、机器人和PC机。手持示教器精度测试平台图4为实验平台实物图,表1为平台参数。
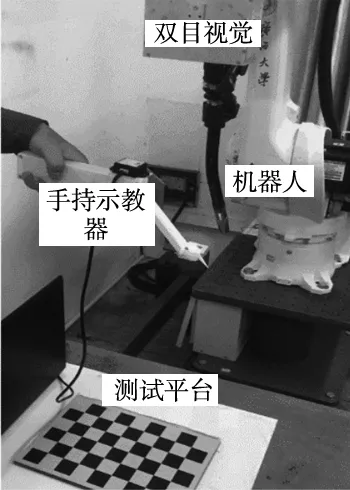
图4 手持示教器实验平台

表1 手持示教器测试平台参数
3.2 手持示教器发光点和末端点的相对位置
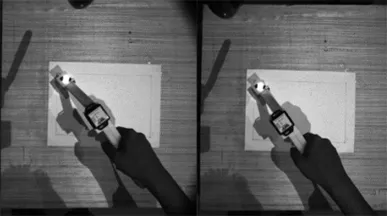
(a) 高曝光时间

(b) 低曝光时间图5 双目视觉下的发光点
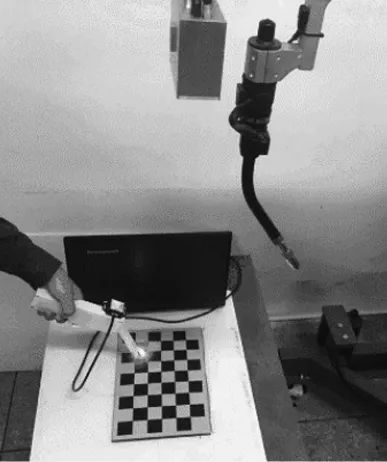
图6 手持示教器发光点和末端点的相对位置标定实验
3.3 实验设计
为验证手持示教器的示教功能和测量示教复现精度,设计两组实验。
第1组:设计示教复现位置精度实验,测量复现位置精度,评估使用手持示教器示教的精度。
第2组:轨迹复现实验。将示教的点规划成直线和圆弧轨迹,并使用红色中性笔画出复现轨迹,与原轨迹相比测量复现位置误差。
(1)示教复现位置精度实验

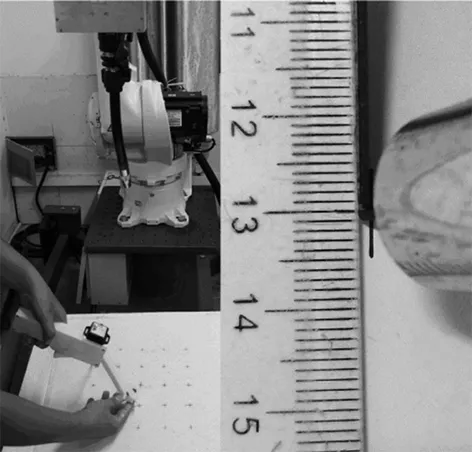
(a) 示教实验 (b) 测量误差图7 示教位置复现实验
(2)根据示教点复现轨迹实验
将书写笔固定在机器人末端,使用手持示教器示教后机器人复现轨迹,带动笔在白纸上留下轨迹,与示教轨迹相比验证精度。该实验包括以下几步:①选定4个不在一条直线上的点,使用手持示教器示教,形成4段直线示教轨迹,机器人带动笔在白纸上留下这4段直线轨迹。②选定3个不在一条直线上的点,使用手持示教器示教,根据三点圆弧示教法形成一段圆弧轨迹,机器人带动笔在白纸上留下圆弧轨迹。
4 实验结果和分析
4.1 手持示教器平移向量标定结果
(8)
4.2 复现实验结果和分析
(1)位置复现精度结果和分析

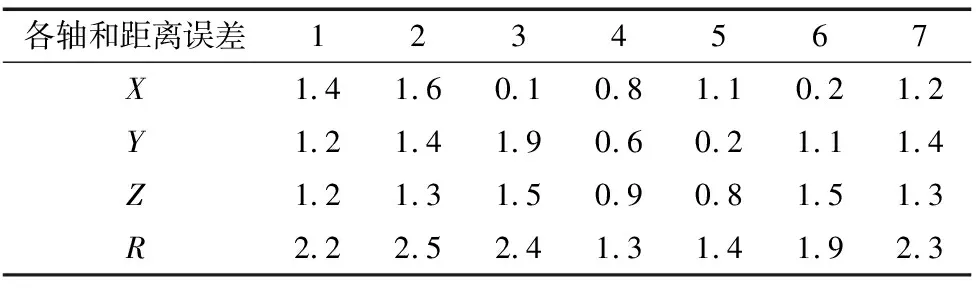
表2 示教复现实验测试点误差 (mm)
由表2可知,误差最大为点3的Z轴方向上的1.9 mm,最小为点3的X轴方向上的0.1 mm示教点2的距离误差最大为2.5 mm。实验的误差来源包括机器人标定误差、相机标定误差、手眼标定误差、手持示教器发光点位置测量误差、姿态传感器角度测量误差,人手的抖动或偏移给手持示教器发光点位置测量和姿态传感器角度测量带来较大的误差。
(2)根据示教点复现轨迹
在示教复现位置精度实验的基础上示教4个点,形成4段封闭的线段;示教3个点形成一段圆弧。机器人末端绑定一只笔,复现直线和圆弧轨迹。图8a为圆弧轨迹复现实验结果,图8b为直线轨迹复现实验结果,图中十字交叉点为示教点,黑色轨迹为示教轨迹,红色轨迹为示教复现轨迹。使用直尺测量示教误差,测量实际轨迹和示教轨迹的误差最大约为2 mm。
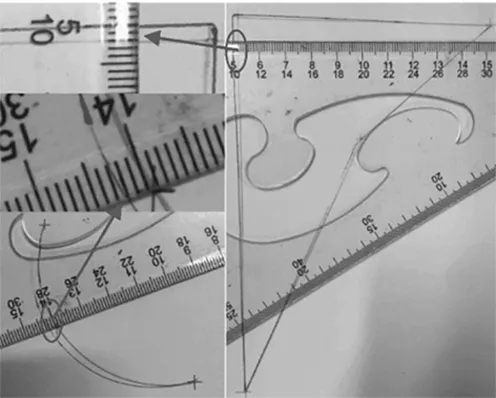
(a) 圆弧轨迹误差 (b) 直线轨迹误差图8 轨迹复现实验
5 结论
针对目前示教效率低的难题,设计一种基于双目视觉(姿态传感器)的手持示教器,搭建手持示教器精度测试平台,获得研究结论为:
(1)设计安装有姿态传感器和发光点的手持示教器,示教点的姿态信息可以直接通过姿态传感器测量,避免了姿态角的解算,减小了计算量。
(2)双目视觉环境下的手持示教器特征点仅为一个发光点,可降低双目视觉的图像识别、匹配难度和环境光对特征点识别的影响。
(3)在双目视觉下确定手持示教器末端坐标系和机器人坐标系的变换矩阵;在搭建的实验平台上验证通过该手持示教器示教的有效性。复现结果表明机器人能够精确复现手持示教器的示教点,并能通过示教点完成直线和圆弧的轨迹。
猜你喜欢
学生天地(2020年3期)2020-08-25 09:04:16
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
电子制作(2019年20期)2019-12-04 03:51:38
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
现代装饰(2018年5期)2018-05-26 09:09:39
中国三峡(2017年2期)2017-06-09 08:15:29
现代计算机(2016年11期)2016-02-28 18:35:20
机械与电子(2014年2期)2014-02-28 02:07:46
