
离心侧抛式藕田撒肥器设计与试验
2021-12-28 11:51张国忠刘浩蓬侯群喜
农业工程学报 2021年19期
张国忠,王 洋,刘浩蓬,季 超,侯群喜,周 勇
离心侧抛式藕田撒肥器设计与试验
张国忠1,2,王 洋1,2,刘浩蓬1,2,季 超1,2,侯群喜1,2,周 勇1,2
(1. 华中农业大学工学院,武汉 430070; 2. 农业农村部长江中下游农业装备重点实验室,武汉 430070)
针对藕田机械化施肥实际需求,该研究设计了一种离心侧抛式撒肥器。通过建立单个肥料颗粒在叶片上受力的理论模型,确定影响颗粒运动特性的主要参数为撒肥盘转速、叶片倾角和叶片偏角。以肥料喂入速率以及上述因素为影响因素,利用EDEM软件进行单因素仿真试验,结果显示以撒肥器中心为原点,沿抛撒方向,肥料在单个统计区域的分布量变化趋势为先升高后降低。定义肥料分布最多的单个统计区域与撒肥器间的距离为峰值距离,以肥料分布均匀性变异系数和峰值距离为评价指标进行正交旋转仿真试验,根据试验结果利用Design-Expert软件对撒肥器结构进行优化,求取峰值距离为10、21 m且均匀性变异系数最小的两种叶片各自对应的叶片倾角和叶片偏角分别为8.5°、17.5°和11.5°、–1.9°。以上述结构撒肥器开展仿真与实际撒肥试验。仿真结果显示:撒肥盘转速1 250 r/min、喂入速率0.316 kg/s时,肥料分布均匀性变异系数、峰值距离、作业幅宽分别为19.43%、21 m和29 m,实际试验结果分别为21.95%、18.6 m和24.5 m。以藕田追肥中常用肥料尿素、复合肥、磷肥为对象开展撒肥性能试验,结果显示,撒肥盘转速、喂入速率、肥料种类、肥料种类与转速的交互项、肥料种类与喂入速率的交互项对肥料分布均匀性变异系数影响极显著(<0.01),转速、喂入速率、种类对作业幅宽影响极显著(<0.01)。该研究结果可为藕田撒肥机械设计提供重要参考。
农业机械;离散元;藕田;侧抛式撒肥器;峰值距离
0 引 言
莲藕是中国种植面积最大、产量最高的一种水生蔬菜,具有喜肥耐肥的特性,后期需追肥2~3次[1-2],但由于其特殊的水田环境和生长后期荷叶封行,导致施肥机械无法下田作业,现阶段追肥仍以人工抛撒为主,作业效率低且均匀度差[3]。
目前常用的机械施肥方式有条施和撒施[4-6]。条施配合开沟覆土使肥料利用率较高,易于精量施肥作业,其主要用于旱地作物,不适于藕田环境[7-9]。与条施机械相比,离心式撒肥器具有结构简单、作业幅宽大,应用广泛的特点[10-12]。国外Villette等建立运动模型研究了肥料颗粒被抛出撒肥盘时的径向与切向速度之比[13]。Fulton等以变量撒肥机为对象开展撒肥试验,考察了不同施肥量下的均匀性变化情况并分析了相应的函数关系[14]。Dintwa等对肥料颗粒在圆盘上的运动进行了分析,推导出单颗肥料粒在平面和锥形撒肥盘上的基本运动方程[15]。Olieslagers等建立了施肥量变化对肥料分布影响的数学模型,并利用该模型对不同施肥量作业的肥料分布状况进行了预测[16]。Coetzee等利用离散元模型研究了圆盘转速、落肥口位置及喂入速率等因素对肥料分布的影响,实际验证结果表明仿真模型具有较好的预测效果[17]。总体来看,离心撒肥机主要用于旱地撒施,国外对其研究早、时间长,目前其相关制造技术已较为成熟[18-19]。
近年来国内对离心式撒肥机的研究逐渐增多。吕金庆等设计了一种叶片可延伸的撒肥盘,分析了肥料颗粒在撒肥盘上的运动学特性并开展了相关试验[20]。胡永光等设计了一种适用于茶树窄行距的偏置式撒肥盘并分析了行走速度、偏置角度等因素对撒肥盘性能的影响[21]。刘彩玲等采用EDEM仿真方法分析了撒肥盘转速、喂入位置、喂入速率对撒肥性能的影响,并对撒肥机作业参数进行了优化[22]。施印炎等设计了一种匀肥罩式地表变量撒肥机,研究了排肥流量、圆盘转速、机具行进速度对分布变异系数和施肥量相对误差的影响[23]。为研究离心圆盘式撒肥机撒肥均匀性,杨利伟等对基于作物实时传感器的变量作业撒肥机协同调整方案进行了研究[24]。
目前离心式撒肥机均采用拖拉机或高地隙底盘挂接撒肥装置,田间作业时将肥料颗粒向后抛撒至呈一定圆心角的环形区域[11],但藕田追肥时,离心式撒肥机不下田,沿田埂以与机具移动垂直的方向侧向抛撒肥料。针对上述问题,本文设计了一种离心侧抛式藕田撒肥器,通过对肥料颗粒进行运动学分析,确定影响肥料分布规律的主要因素,同时利用EDEM离散元软件进行撒肥仿真试验,根据试验结果优化撒肥盘结构和运动参数,并进行台架试验验证,以期为藕田施肥机械设计提供参考。
1 离心侧抛式藕田撒肥器结构与工作原理
本文研制的撒肥器主要由螺旋排肥器、侧抛式撒肥盘、导流罩、肥箱、机架等组成,如图1所示。
肥料由螺旋排肥器排出,经盖板上的喂入口进入导流罩内部并下落至撒肥盘,在撒肥盘叶片作用下,肥料随叶片回转,同时受离心力与科氏力作用,向叶片边缘与上方运动,最终肥料颗粒在叶片边缘不同高度位置上以不同旋转速度落向导流罩,并沿导流罩按照一定方向抛出。
2 关键部件设计
2.1 侧抛式撒肥机构
侧抛式撒肥机构主要由撒肥圆盘与撒肥叶片组成,当撒肥盘旋转时,肥料颗粒随叶片边缘旋转半径增加,抛出速度呈增大趋势,并最终呈面状分布在作业区域,叶片形状对肥料侧抛分布状态具有直接影响。
由图2可知,该撒肥机构撒肥叶片主要结构参数为最大旋转直径、最小旋转直径以及叶片倾角。最大旋转直径越大,则作业幅宽越大,整体结构也会增大,肥料运动至叶片边缘所需时间增加,不利于控制肥料整体运动状态;最小旋转直径越大,则与之间的差值越小,使肥料在作业区域内的分散程度降低,不利于肥料均匀分布,且过小将导致肥料在近处堆积。叶片倾角则对肥料抛送速度及位置产生影响。目前相关研究中,撒肥盘旋转直径在250~560 mm,本文设计选取最大旋转直径为460 mm;参考现有小型手持式撒肥器的尺寸,取值为190 mm,且最小旋转直径与撒肥盘直径相等,叶片倾角结合理论分析与试验选取[24-25]。
2.2 导流罩
为有效控制肥料分布区域,设计了如图3所示的导流罩,其内表面与叶片边缘曲线贴合以起导流作用,支座为圆柱形,与撒肥盘限位配合,提高机构运转稳定性。
导流罩形状对肥料分布产生直接影响。结合撒肥叶片结构和仿真效果设置其底板倾斜角度为20°,两侧挡板间角度为15°,以减小肥料颗粒碰撞到挡板上的速度损失[26]。
2.3 螺旋排肥器
为调控单位时间内的撒肥量,本文使用螺旋排肥器为撒肥机构进行定量供肥[25]。螺旋排肥器直径决定其单位时间的排肥能力,根据藕田追肥作业中的实际施肥量与本机作业目标,在撒肥器移动速度为0.42 m/s、作业幅宽20 m、750 kg/hm2的条件下,根据式(1)计算所需最大排肥量0为0.625 kg/s,利用公式(2)计算此时螺旋排肥器所需直径为117 mm,取整为120 mm。
式中为每公顷施肥量,kg/hm2;为作业幅宽,m;机为机具行走速度,m/s。
式中为实际排肥量,t/h;进行相关参数的选取:为排肥器螺旋叶片直径与螺距之比,取0.8[27];为物料特性综合特性系数,取30[27];为排肥器倾斜系数,由于为水平放置,故取1[27];为前期实际测得恒盛牌大颗粒尿素的堆积密度,为0.945 t/m3;为填充系数,取0.45。
3 肥料颗粒运动规律分析
传统撒肥机行走方向与撒肥方向同向,作业时向机具后方撒出肥料,肥料覆盖区为环形,利用前后撒肥区域重复覆盖以提高肥料分布均匀程度,如图4a所示。离心侧抛式撒肥机沿田埂前进,向侧向撒肥,即肥料抛撒方向与前进方向垂直,且施肥要求为离撒肥机侧向不同距离处均有适量均匀肥料分布,如图4b所示。由此可见,离心侧抛式撒肥与传统方式存在明显不同,为提高侧抛时肥料分布的均匀程度,需研究撒肥器结构参数对肥料颗粒运动及分布特点的影响规律。
以圆盘中心为原点建立空间直角坐标系,垂直方向为轴,撒肥盘径向为轴,面与圆盘面重合,如图5所示。
为使被抛出的肥料具有连续的速度变化区间,本机构中将撒肥叶片边缘初步设置为半径410 mm、圆心角20°的圆周线以对应不同的旋转半径,其斜率逐渐过渡变化,可提高肥料分布均匀程度。同时为促使肥料沿叶片向上运动,使其在竖直方向的叶片表面分布均匀,在竖直方向与叶片表面间设置叶片倾角,经空间坐标变换,叶片边缘曲线方程如式(3)所示。

肥料颗粒在叶片上的受力情况如图5所示。
在叶片表面做加速运动的肥料颗粒,沿、轴方向的受力为
式中F、F、F分别为肥料颗粒在、轴方向的合力;a、a、a分别为肥料颗粒在轴方向的加速度;式(4)中各力的方向如图5所示,其值分别为
式中为肥料颗粒在轴的坐标;为重力加速度;为肥料与叶片间的摩擦系数。
叶片对颗粒的支持力沿各轴向的分力为
肥料颗粒受叶片对其的摩擦力沿三轴方向的分力为
联立式(5)~(7)带入式(4),求出肥料颗粒在坐标系下的运动方程,如式(8)所示。
其中
由式(8)~(9)可知,肥料颗粒沿各轴向的加速度相互影响,其在叶片上的运动轨迹取决于圆盘转速、叶片倾角和偏角。
4 EDEM离散元仿真优化试验
肥料颗粒在离心侧抛式撒肥器中受颗粒力学系统和多体动力学系统组成的复杂系统的共同作用,用传统的研究方法很难直观得到肥料颗粒在离心侧抛式撒肥器作用下的抛撒情况,因此,采用EDEM离散元软件进行单因素试验和二次回归正交旋转组合试验,分析肥料颗粒在不同撒肥器参数下抛撒范围和速度分布的变化情况,为撒肥器的优化提供依据。
4.1 仿真模型设定
将与肥料直接接触的撒肥盘与导流罩、肥料承接板三维模型导入EDEM软件,肥料承接板尺寸为32 m×20 m;叶片与导流板材质为ABS工程塑料,肥料颗粒与其之间的接触为Hertz-Mindlin无滑动接触模型;将肥料颗粒与承接板之间的接触设置为Hertz-Mindlin with模型,以减小肥料颗粒在承接板上的滑移。
4.2 仿真参数设定
以尿素为研究对象,参考文献[23-25]设置仿真参数为:颗粒直径4 mm,密度1 575 kg/m3,泊松比0.4,弹性模量28 MPa;ABS工程材料密度1 060 kg/m3,泊松比0.394,弹性模量2.1 GPa;颗粒与颗粒间弹性恢复系数0.35,静摩擦系数0.3,动摩擦系数0.26;颗粒与工程塑料间恢复系数0.586,静摩擦系数0.43,动摩擦系数0.01。
4.3 仿真试验设计
参考美国ASAE S341.2圆盘式撒肥器静态试验方法[22,26-28]0,在土壤承接区域内设置20行32列统计区域,网格单元1 m×1 m,并将撒肥方向定义为纵向,机具移动方向定义为横向。参考相关文献可知[20,22-23],肥料分布不均主要在纵向,故以该方向的肥料分布均匀性变异系数为撒肥均匀性指标,仿真试验后将每列网格内的肥料质量叠加形成1行32列即32个统计网格,根据32个统计区内的肥量颗粒质量判断作业幅宽并计算肥料分布均匀性变异系数,如图6所示。
肥料纵向分布均匀性变异系数计算公式为
4.4 单因素仿真试验
为研究肥料在作业方向的分布特点与单个因素对肥料分布的影响规律,首先进行单因素仿真试验,改变所要考察的单个因素的值,并使其余因素在各自取值范围的中间值附近保持不变。定义肥料分布最多的单列统计区域与撒肥盘的距离为峰值距离,该区域分布的肥料量为肥料分布峰值。
4.4.1 撒肥盘转速对肥料分布的影响
试验条件为叶片倾角10°,叶片偏角−5°,喂入速率0.475 kg/s,为防止转速过低导致撒肥效果较差[22,24],结合所用直流电机转速范围,选取撒肥盘转速的变化区间为900~1 300 r/min,增量为100 r/min,测得肥料在纵向上的分布如图7a所示,可知,低转速下肥料分布较集中,峰值较大;随转速增加,峰值降低、峰值距离增加、肥料分布范围增大,肥料分布均匀性变异系数减小。分析其原因为:当撒肥盘转速增大,撒肥叶片边缘上任意点间的速度差值将增大,使脱离叶片的肥料颗粒间的速度差值增大,最终导致肥料在分布区域的集中程度降低。
4.4.2 叶片倾角对肥料分布的影响
试验条件为转速1 100 r/min,叶片偏角−5°,喂入速率0.475 kg/s,由于叶片倾角过大不利于肥料沿径向移动,过小则不利于肥料沿纵向移动,故使其在5°~15°内变化、增量为2.5°[22-23]。由图7b可知,在上述范围内,峰值距离与叶片倾角呈正比,峰值则逐渐降低、且变化趋势渐缓,肥料分布均匀性变异系数先减小后增大;故可利用该因素调整峰值距离。
4.4.3 叶片偏角对肥料分布的影响
试验条件为转速1 100 r/min,叶片倾角10°,喂入速率0.475 kg/s,参考文献[21],使叶片偏角在−20°~20°内变化、增量为10°。肥料分布状态如下图7c所示。由图可知,叶片偏角由−20°逐渐增大到20°的过程中,肥料分布峰值先减小后增大,峰值距离变化量较小;观察仿真过程发现,叶片偏角对肥料在叶片上的飞出位置与飞出速度有较大影响,当其值较小时,肥料颗粒整体飞出速度较低,导致其落地点距离撒肥盘较近;当叶片偏角过大时,将使部分肥料颗粒不能及时离开叶片而被挡板弹回。
4.4.4 施肥量对肥料分布的影响
试验条件为转速1 100 r/min,叶片倾角10°,叶片偏角−5°,根据实际施肥需求计算,喂入速率在0.158~0.791 kg/s范围内变化、增量为0.158 kg/s[22]。肥料在纵向上的分布状态如图7d所示,可知,当其他因素不变时,喂入速率对峰值距离无明显影响,但对峰值大小有直接影响。
4.5 旋转正交组合试验
为优化撒肥器性能,研究上述因素及其交互项对指标准确的影响程度,以有效作业幅宽内的肥料分布均匀性变异系数和峰值距离为试验指标进行二次旋转正交组合试验[29-30]。参照ASAE S341.2的定义[28],将肥料分布量为峰值撒肥量1/2的单个统计区域与撒肥器的距离作为有效作业幅宽,如图8所示。
4.5.1 二次旋转正交组合试验设计
依据前述单因素试验确定各因素水平,并采用四因素五水平旋转正交组合试验进行结果优化,取试验臂长=2,各水平编码如表1所示;试验方案与结果如表2所示。

表1 因素水平编码表
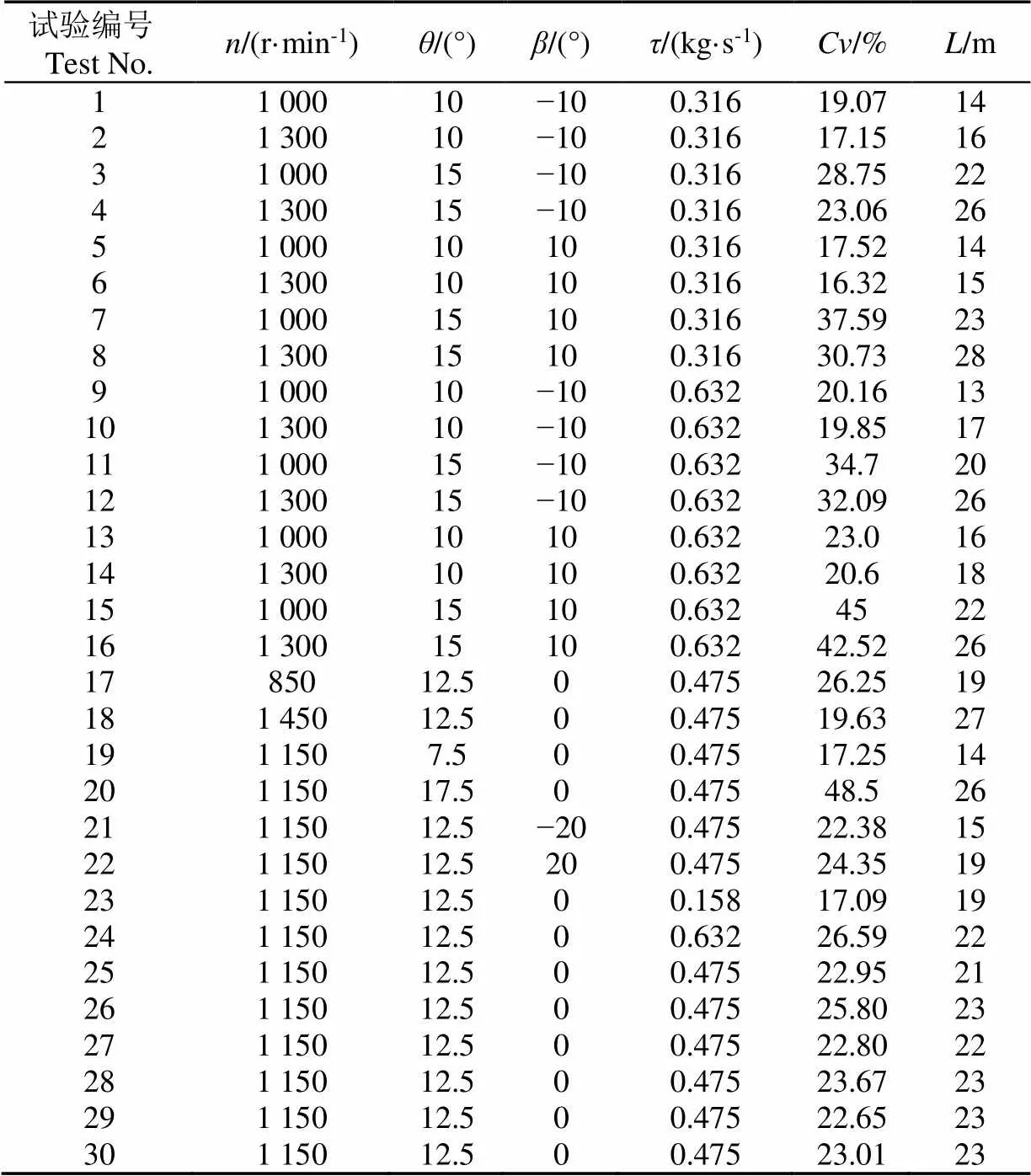
表2 试验方案及结果
注:表示肥料分布均匀性变异系数,%;表示峰值距离,m。
Note:is variation coefficient of fertilizer distribution uniformity,%;is peak distance, m.
4.5.2试验结果分析
利用Design-Expert8.0.6软件对表中试验结果进行多元回归拟合分析,并逐步去除对试验指标影响不显著的因素,方差分析如表3、表4所示,肥料分布均匀性变异系数和峰值距离的失拟项分别为0.183 0和0.199 7,均不显著。
肥料分布均匀性变异系数与各因素的回归方程为
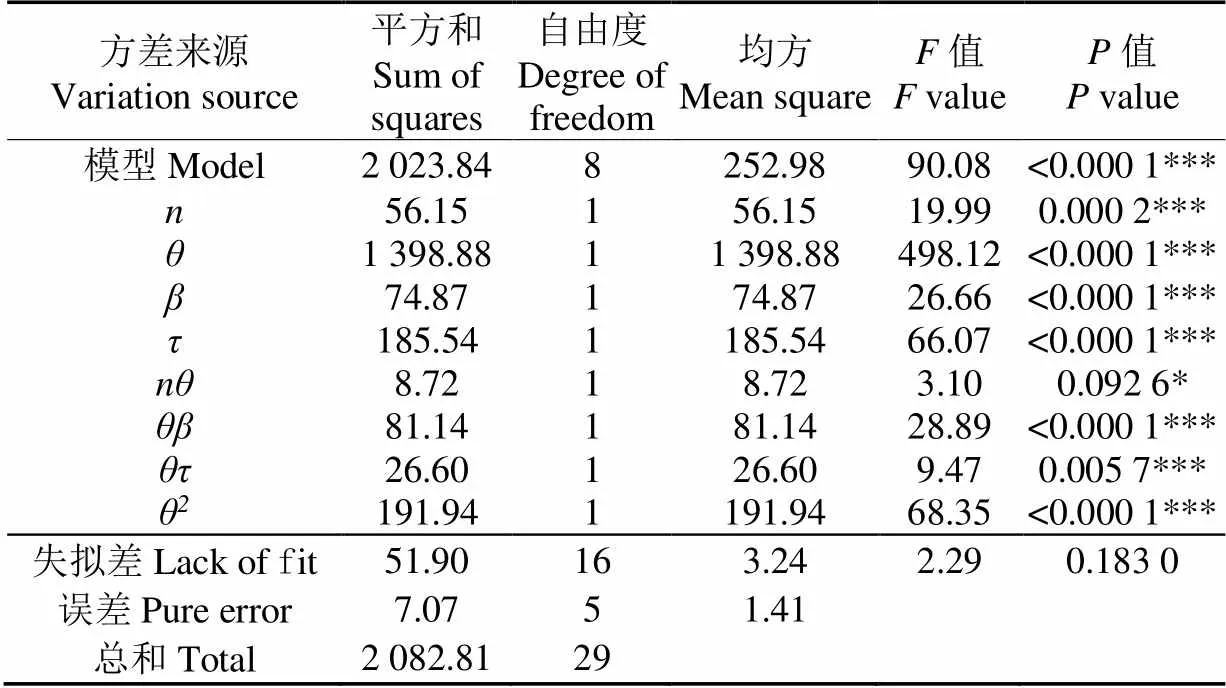
表3 肥料分布均匀性变异系数方差分析
注:***表示极显著(<0.01),**表示显著(0.01<<0.05),*表示较显著(0.05<<0.1)。
Note: *** means extremely significant (<0.01), ** means significant (0.01<<0.05), * means more significant (0.05<<0.1).

表4 峰值距离方差分析
峰值位置与各因素的回归方程为
4.5.3 响应曲面分析
利用Design expert软件对方差分析表中交互作用显著的项进行响应面分析,如图9所示。
叶片偏角0°、喂入速率0.475 kg/s时,叶片倾角与肥盘转速对肥料分布均匀性变异系数与峰值距离的响应曲面如图9a、9d所示。当转速一定时,叶片倾角与分布均匀性变异系数、峰值距离呈正比;叶片倾角一定时,转速与分布均匀性变异系数呈反比,与峰值距离呈正比,且转速对变异系数的影响程度随着叶片倾角减小而降低。
转速1 150 r/min、喂入速率0.475 kg/s时,叶片倾角与叶片偏角的响应曲面如图9b所示。当叶片偏角<0°时,随着叶片倾角增大,肥料分布均匀性变异系数先下降后上升;当叶片偏角>0°时,叶片倾角的值与变异系数呈正比;当叶片倾角<12.5°时,变异系数随着叶片偏角下降而升高;当叶片倾角>12.5°时,变异系数随着叶片偏角下降而减小;叶片倾角在12.5°附近时,对变异系数无明显影响。
转速1 150 r/min、叶片偏角0°时,喂入速率与叶片倾角对肥料分布均匀性变异系数与峰值距离的响应曲面如图9c、9e所示。当喂入速率一定时,叶片倾角与肥料分布均匀性变异系数、峰值距离呈正比,且喂入速率越大,叶片倾角对峰值距离的影响越小;当叶片倾角一定时,喂入速率与变异系数呈正比,且喂入速率对变异系数的影响随叶片倾角的减小而降低;叶片倾角在7.5°~12.5°时,峰值距离与喂入速率的关系呈正比,当叶片倾角在12.5°~17.5°时,峰值距离与喂入速率的关系呈反比。
由上述试验可知,肥料分布峰值较高不利于肥料均匀分布,故拟利用单一撒肥盘安装多角度参数叶片,使每种叶片抛撒出的肥料形成不同的峰值距离,并最终叠加在撒肥区域以降低该区域的肥料分布峰值,提高肥料分布均匀性。
4.5.4 参数优化
根据上述回归方程、响应曲面分析结果可知,肥料分布均匀性变异系数与喂入速率呈正比、与转速呈反比,综合考虑作业效率与撒肥效果,在1 250 r/min、0.316 kg/s的条件下,以表1中叶片倾角、叶片偏角的取值范围为约束条件,利用上述回归模型分别求峰值距离=10 m、=21 m时的最小变异系数,结果为:当峰值距离为=10 m时,叶片倾角、叶片偏角的值取8.5°、17.5°可获得最小的肥料分布均匀性变异系数,其值为13.85%;当峰值位置为=21 m时,叶片倾角、叶片偏角的值取11.5°、–1.9°可获得最小的肥料分布均匀性变异系数,其值为17.95%。
将叶片倾角、叶片偏角分别为8.5°、17.5°的叶片安装于撒肥圆盘组成仿真模型进行仿真验证,肥料分布均匀性变异系数为16.32%,有效作业幅宽为27 m;将叶片倾角、叶片偏角分别为11.5°、–1.9°的叶片安装于撒肥圆盘组成仿真模型进行仿真验证,肥料分布均匀性变异系数为21.75%,有效作业幅宽为30 m。
将以上2种叶片间隔组合布置于撒肥盘组成仿真模型进行仿真试验,肥料分布均匀性变异系数为19.43%,峰值距离为21 m,有效作业幅宽为29 m;肥料分布曲线如图10所示。
5 撒肥器性能试验
为了验证所设计的撒肥器的作业性能,分别搭建试验台和加工样机进行作业性能试验,试验场景如图11所示。
5.1 台架作业试验
将叶片倾角、叶片偏角分别为8.5°、17.5°和11.5°、−1.9°的2组叶片对称安装于撒肥盘,搭建台架进行实际撒肥试验,试验时间为2020年12月25日,试验地点为华中农业大学工学院试驾场地,试验当天晴朗无风。所用肥料分别为恒盛牌大颗粒尿素、桂湖牌复合肥、吉顺牌粒状过磷酸钙,其主要物理特性如表5所示。参考文献[24],按每两列仿真统计区对应一列收集盒的方式,共摆放16列10行,实际收集区域与仿真试验统计区相同。
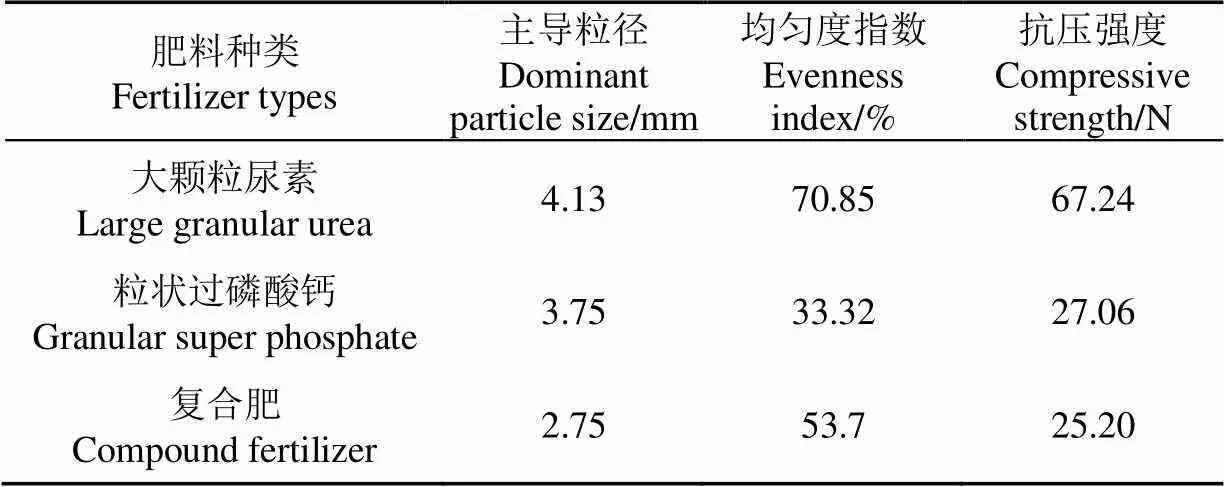
表5 肥料物理特性
注:均匀度指数是肥料颗粒粒径的均匀度,其数值越大,表示颗粒均匀性越好。
Note: uniformity index is the uniformity of fertilizer particle size, the greater its value, the better the uniformity between particles.
5.1.1 单类肥料试验
在相同喂入速率与撒肥盘转速下,以主导粒径为4 mm的大颗粒尿素为对象开展验证试验,如图11a所示。撒肥时间与仿真试验相同,重复测量3次。结果显示肥料分布均匀性变异系数分别为23.35%、22.45%、20.05%,峰值距离分别为20、18、18 m,有效作业幅宽分别为24、24、26 m,上述各指标的均值为21.95%、18.6 m、24.5 m,与仿真结果的误差分别为12.95%、11.42%、15.51%。分析产生上述误差的主要原因是由于结构、作业参数存在测量误差,且实际撒肥过程中存在空气阻力的影响。
5.1.2 不同肥料的作业性能试验
由于不同肥料种类的粒径和力学参数差异较大,为研究相同作业参数下的不同肥料的实际撒施性能效果,以藕田追肥中常用上述3种肥料为对象,以撒肥盘转速与喂入速率为因素进行全因素试验[31]。试验因素及水平编码如表6所示,试验方案、试验指标与试验结果如表7所示。

表6 不同肥料的作业性能试验因素
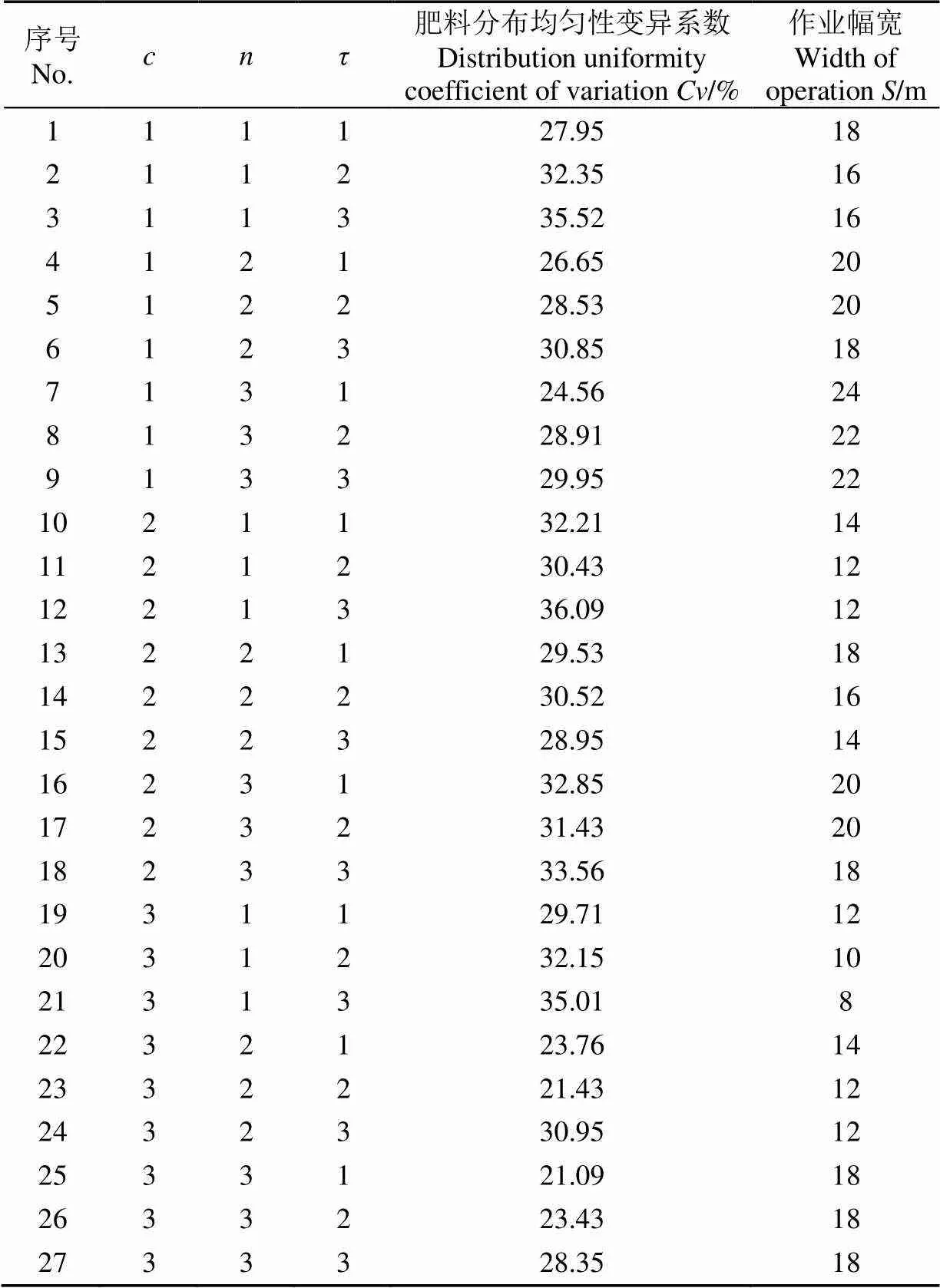
表7 台架试验方案及结果
5.1.3 试验结果分析
由表7可知,随撒肥盘转速增大,3种肥料的作业幅宽均呈现逐渐上升的趋势,且大颗粒尿素与复合肥的肥料分布均匀性变异系数随撒肥盘转速增大逐渐下降,但过磷酸钙的变异系数变化趋势则为先下降后上升;结合表5分析造成该趋势的原因为过磷酸钙强度较差且粒径较大,导致其在与撒肥叶片的碰撞中易破碎成尺寸不等的碎块,使颗粒间的均匀性差异进一步增大,最终导致肥料分布均匀性变异系数增大。故应根据肥料的种类选择适合的作业参数。
由表8、表9可知,撒肥盘转速、喂入速率对大颗粒尿素的肥料分布均匀性变异系数与作业幅宽影响极显著;撒肥盘转速的二次项对过磷酸钙的肥料分布均匀性变异系数影响较显著,撒肥盘转速、喂入速率对其影响极显著;撒肥盘转速、喂入速率对复合肥的肥料分布均匀性变异系数影响显著,撒肥盘转速对其作业幅宽影响极显著,喂入速率对其作业幅宽影响较显著。
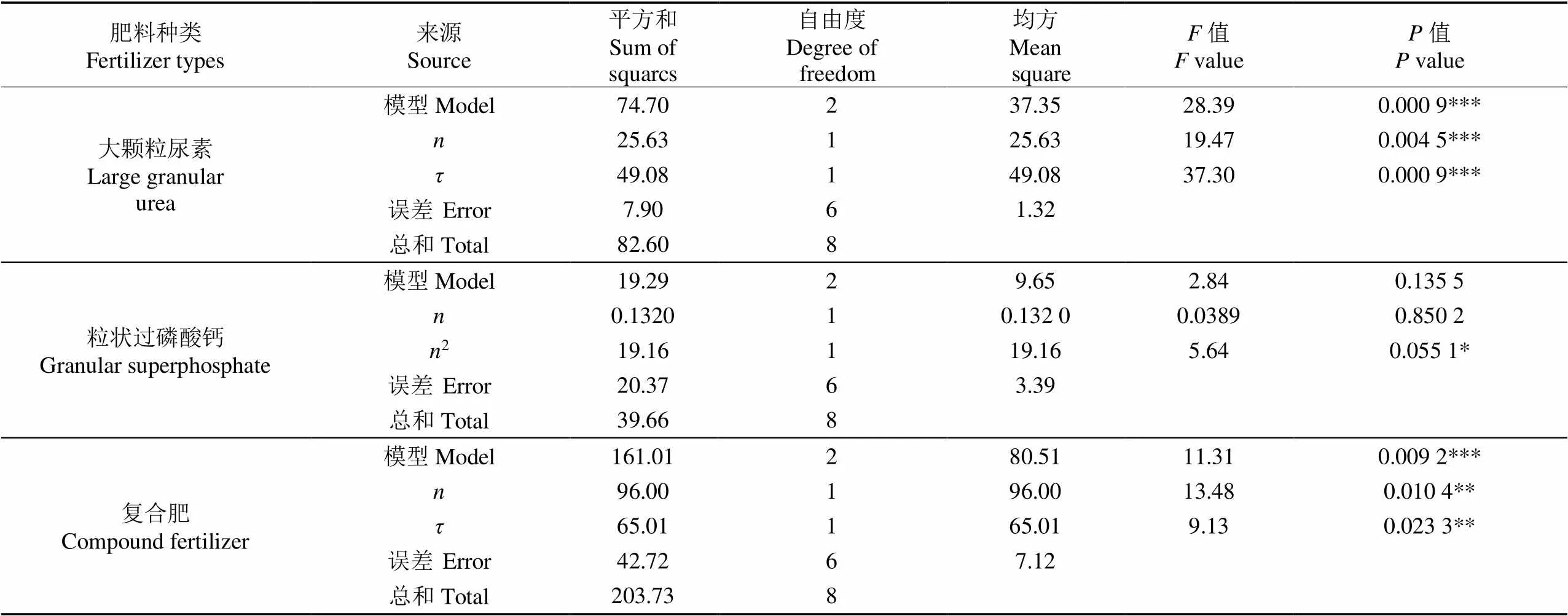
表8 变异系数方差分析
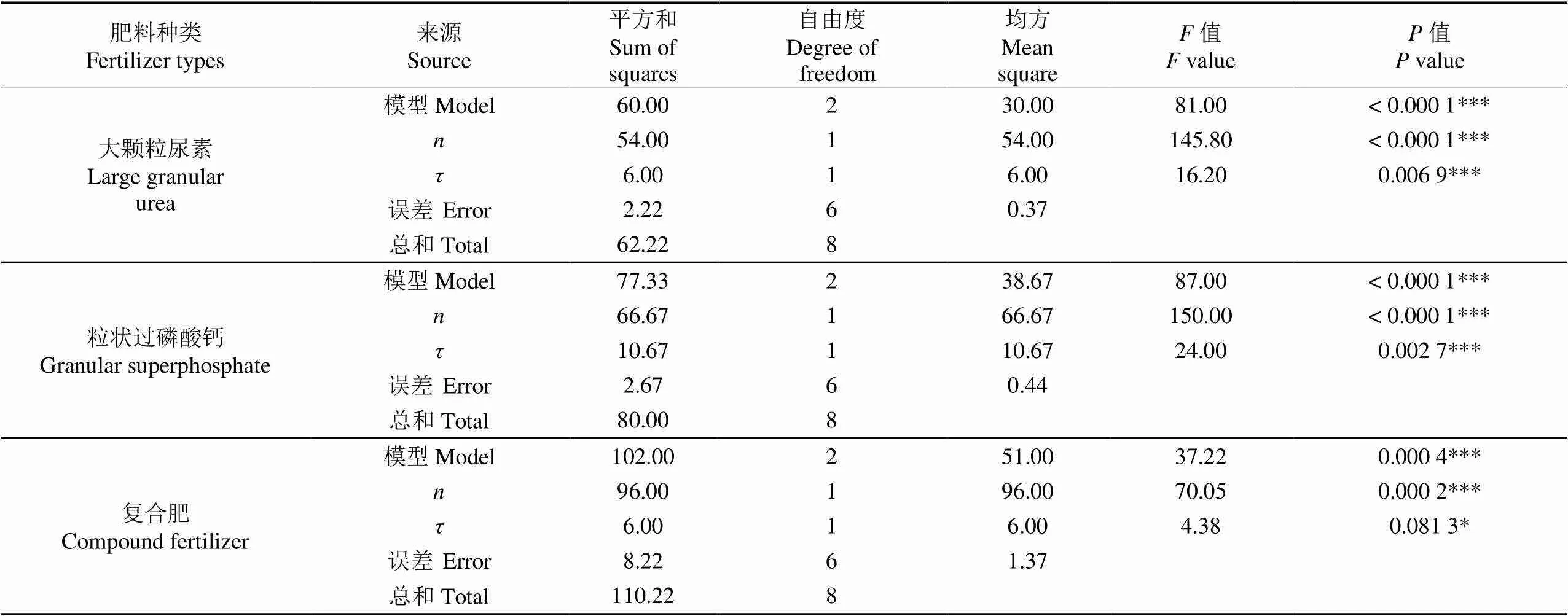
表9 作业幅宽方差分析
5.2 整机测试
调整收集盒摆放方式为6行21列、行间距与列间距均为1.2 m,以提高统计结果的准确程度。如图11b所示,将优化后排肥器安装于自走式履带底盘上,以一定速度匀速行进,模拟藕田施肥作业情况,此时施肥盘离地高度为1.5 m。试验时,在距离收集区域前、后3 m处开始与停止撒肥,每次试验后称取各收集盒内的肥料质量,均匀性变异系数计算方法与前述相同。
依据前期试验结果,为探究机具速度对试验指标的影响,开展四因素三水平正交试验,试验安排如表10所示;试验方案及结果如表11所示。
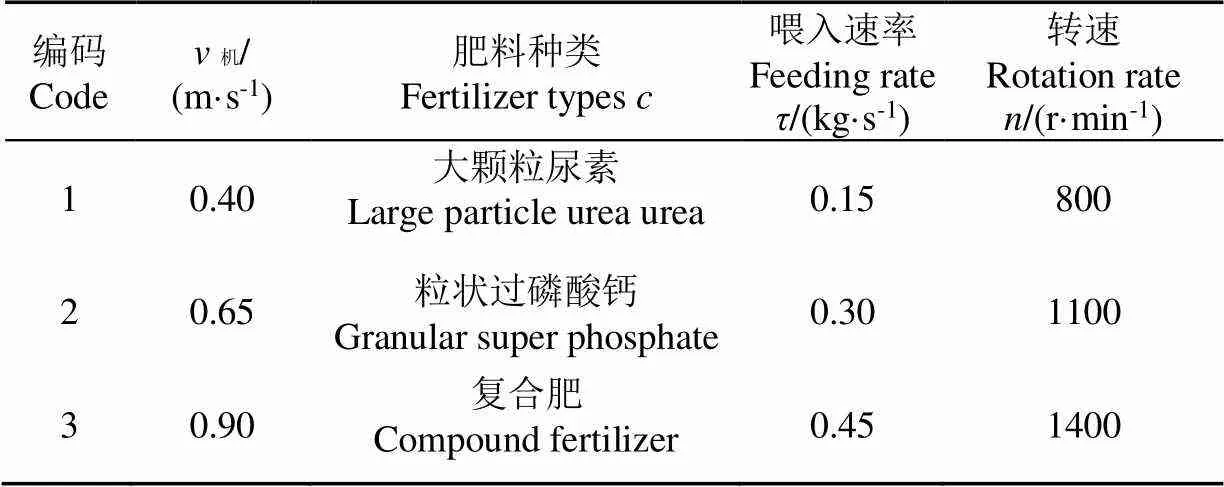
表10 因素水平编码表
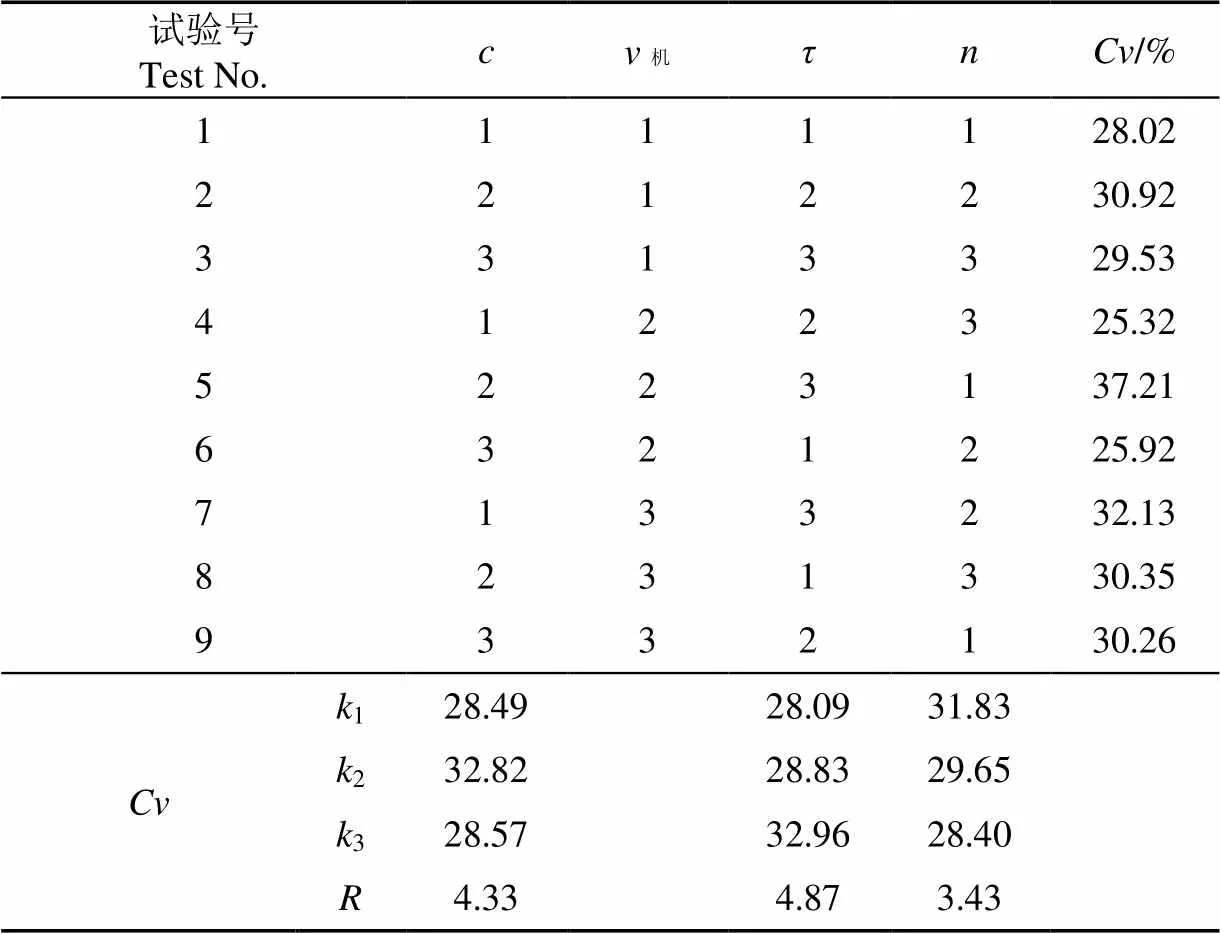
表11 整机试验方案及结果
由表11可知,在机具行进过程中,上述因素对肥料分布均匀性变异系数的影响程度从高到低依次为喂入速率、肥料种类、撒肥盘转速、机具行走速度。
6 结 论
1)本文设计了一种离心侧抛式藕田撒肥器,对单个肥料颗粒在其叶片上的运动学特性进行分析,确定了影响其受力状态的主要因素。单因素仿真试验结果显示肥料在撒肥纵向上的分布规律均为先升高后降低,且均存在撒肥量峰值。
2)进行二次旋转正交组合试验。利用Design expert软件对正交旋转组合试验结果进行了方差分析和响应面分析,结果表明转速、叶片倾角、叶片偏角、叶片倾角与喂入速率的交互项、叶片倾角与叶片偏角的交互项、叶片倾角的二次项对均匀度变异系数影响极显著(<0.01),转速、叶片倾角及其二次项、喂入速率的二次项对峰值距离影响极显著(<0.01)。
3)利用回归方程求取撒肥量峰值距离分别为10、21 m,对应的变异系数最小时的优化后叶片倾角、叶片偏角分别为8.5°、17.5°和11.5°、−1.9°,将上述参数叶片对称安装与撒肥盘并进行仿真优化试验,结果表明其变异系数为19.43%,撒肥量峰值距离为21 m,有效作业幅宽为29 m;台架验证试验表明,上述各指标的均值为21.95%、18.6、24.5 m,与仿真结果的误差分别为12.95%、11.42%、15.51%,满足藕田撒肥要求。
4)分别以藕田常用的3种肥料对该撒肥器进行了撒肥试验,试验结果显示大颗粒尿素与复合肥对撒肥器转速的适应范围较大,撒肥盘高速旋转下其作业幅宽增加、均匀性变异系数降低,施肥效果较好;过磷酸钙在撒肥器高转速下的破碎率较高,均匀性变异系数增大,故不适宜在高转速下作业,试验结果可为3种肥料作业参数的选择提供依据。
[1] 柯卫东,黄新芳,李建洪,等. 我国水生蔬菜科研与生产发展概况[J]. 长江蔬菜,2015(14):33-37.
[2] 李瑞安.莲藕栽后的管理技术[J].北京农业,2013(15):39.
[3] 廖剑,王锐,李旭,等.莲藕机械化施肥技术研究现状与展望[J].湖北农机化,2019(23):181-184.
[4] 袁文胜,金梅,吴崇友,等.国内种肥施肥机械化发展现状及思考[J].农机化研究,2011,33(12):1-5.
Yuan Wensheng, Jin Mei, Wu Chongyou, et al.Development status and prospect of seed manure fertilizing mechanization in China[J]. Journal of Agricultural Mechanization Research, 2011, 33(12): 1-5. (in Chinese with English abstract)
[5] 宋德庆,黄正明,薛忠. 我国追肥施布机械及技术研究现状与展望[J]. 农机化研究,2014,36(2):241-244.
Song Deqing, Huang Zhengming, Xue Zhong, et al.Research status and prospect of topdressing machinery and technology in China[J]. Journal of Agricultural Mechanization Research, 2014, 36(2): 241-244. (in Chinese with English abstract)
[6] 唐汉,王金武,徐常塑,等. 化肥减施增效关键技术研究进展分析[J]. 农业机械学报,2019,50(4):1-19.
Tang Han, Wang Jinwu, Xu Changsu, et al. Research progress analysis on key technology of chemical fertilizer reduction and efficiency increase[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(4): 1-19. (in Chinese with English abstract)
[7] 张宏建,徐春保,刘双喜,等.自动调节深度式果园双行开沟施肥机设计与试验[J].农业机械学报,2021,52(1): 62-72.
Zhang Hongjian, Xu Chunbao, Liu Shuangxi, et al. Design and experiment of orchard double row ditching-fertilizer machinewith automatic depth adjustmen[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(1): 62-72. (in Chinese with English abstract)
[8] 董俊汶,汪洋,赵进,等.条施机定量施肥控制系统设计[J]. 西南师范大学学报:自然科学版,2019,44(4):93-99.
Dong Junwen, Wang Yang, Zhao Jin, et al. On design of control system with quantitative fertilization for band applicator[J]. Journal of Southwest China Normal University: Natural Science Edition, 2019, 44(4): 93-99. (in Chinese with English abstract)
[9] 孙兴祚,刘潇,王忠军,等.新疆果园有机肥条施机设计与试验[J].中国农机化学报,2018,39(6):48-51,76.
Sun Xingzuo, Liu Xiao, Wang Zhongjun, et al. Design and experiment of organic fertilizer banding machine in Xinjiang's orchard[J]. Journal of Chinese Agricultural Mechanization, 2018, 39(6): 48-51, 76. (in Chinese with English abstract)
[10] 芦新春,陈书法,杨进,等.宽幅高效离心式双圆盘撒肥机设计与试验[J].农机化研究,2015,37(8):100-103.
Lu Xinchun, Chen Shufa, Yang Jin, et al. Design and experiment on double-disc spreader with wide breadth and highly efficiency[J]. Journal of Agricultural Mechanization Research, 2015, 37(8): 100-103.(in Chinese with English abstract)
[11] 董向前,宋建农,张军奎,等.锥盘式颗粒肥撒施机构抛撒性能分析与试验[J].农业工程学报,2013,29(19):33-40.
Dong Xiangqian, Song Jiannong, Zhang Junkui, et al.Working performance and experiment on granular fertilizer spreader with cone disk[J].Transactions of the Chinese Scoiety of Agricultural Engineering (Transactions of the CSAE), 2013, 29(19): 33-40. (in Chinese with English abstract)
[12] 张睿,王秀,马伟,等. 变量施肥抛撒机撒肥机构研究[J]. 农机化研究,2013,35(11):153-155,163.
Zhang Rui, Wang Xiu, Ma Wei, et al.Design and experiment on spreading mechanism of variable rate fertilizer spreader[J]. Journal of Agricultural Mechanization Research, 2013, 35(11): 153-155, 163. (in Chinese with English abstract)
[13] Villette S, Cointault F, Piron E, et al. Centrifugal spreading: An analytical model for the motion of fertiliser particles on a spinning disc[J]. Biosystems Engineering, 2005, 92(2): 157-164.
[14] Fulton J P, Shearer S A, Higgins S F, et al. Performance assessment and model development of a variable-rate, spinner-disc fertilizer applicator[J]. Transactions of the ASAE, 2001, 44(5): 1071-1081.
[15] Dintwa E, Liedekerke P V, Olieslagers R, et al. Model for simulation of particle flow on a centrifugal fertiliser spreader[J]. Biosystems Engineering, 2004, 87(4): 407-415.
[16] Olieslagers R, Ramo H, Baerdemaeker J D.Calculation of fertilizer distribution patterns from a spinning disc spreader by means of a simulation model[J].Journal of Agricultural Engineering Research, 1996, 63(2): 137-152.
[17] Coetzee C J, Lombard S G. Discrete element method modelling of a centrifugal fertiliser spreader[J]. Biosystems Engineering, 2011, 109(4): 308-325.
[18] 王飞.国外撒肥机发展概况[J].农业工程,2016,6(2):31-34,42.
Wang Fei. Development situation about spreader at abroad[J].Agricultural Engineering, 2016, 6(2): 31-34, 42. (in Chinese with English abstract)
[19] 白由路.国内外施肥机械的发展概况及需求分析[J].中国土壤与肥料,2016(3):1-4.
Bai Youlu.Development situation and demand analysis of fertilizer application machinery at home and abroad[J].Soil and Fertilizer Sciences in China, 2016(3): 1-4. (in Chinese with English abstract)
[20] 吕金庆,尚琴琴,杨颖,等.锥盘式撒肥装置的性能分析与试验[J].农业工程学报,2016,32(11):16-24.
Lü Jinqing, Shang Qinqin, Yang Ying, et al.Performance analysis and experiment on granular fertilizer spreader with swing disk[J].Transactions of the Chinese Scoiety of Agricultural Engineering (Transactions of the CSAE), 2016, 32(11): 16-24. (in Chinese with English abstract)
[21] 胡永光,杨叶成,肖宏儒,等.茶园施肥机离心撒肥过程仿真与参数优化[J].农业机械学报,2016,47(5):77-82.
Hu Yongguang, Yang Yecheng, Xiao Hongru, et al.Simulation and parameter optimization of centrifugal fertilizer spreader for tea plants[J].Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(5): 77-82. (in Chinese with English abstract)
[22] 刘彩玲,黎艳妮,宋建农,等.基于EDEM的离心甩盘撒肥器性能分析与试验[J].农业工程学报,2017,33(14):32-39.
Liu Cailing, Li Yanni, Song Jiannong, et al.Experiment on fertilizer spreader with centrifugal swing disk based on EDEM[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(14): 32-39. (in Chinese with English abstract)
[23] 施印炎,陈满,汪小旵,等.离心匀肥罩式水稻地表变量撒肥机设计与试验[J].农业机械学报,2018,49(3):86-93,113.
Shi Yinyan, Chen Man, Wang Xiaochan, et al. Design and experiment of variable-rate fertilizer spreader with centrifugal distribution cover for rice paddy surface fertilization[J]. Transactions of the Chinese Society for Agricultural Machinery 2018, 49(3): 86-93, 113. (in Chinese with English abstract)
[24] 杨立伟,陈龙胜,张俊逸,等.离心圆盘式撒肥机撒肥均匀性试验[J].农业机械学报,2019,50(S1):108-114.
Yang Liwei, Chen Longsheng, Zhang Junyi, et al. Test and analysis of uniformity of centrifugal disc spreading[J].Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(S1): 108-114. (in Chinese with English abstract)
[25] 董晓威. 垂直螺旋式水稻侧深施肥机理与装置参数研究[D]. 大庆:黑龙江八一农垦大学,2019.
Dong Xiaowei. Mechanism and Parameters of Vertical spiral Rice deep-side Fertilizing Device[D]. Daqing: Heilongjiang Bayi Agricultural University, 2019. (in Chinese with English abstract)
[26] Jones J R, Hayden L G, Yule I J.A statistical comparison of international fertiliser spreader test methods-confidence in bout width calculations[J].Powder Technology. 2008, 184(3): 337-351.
[27] Geneva (Switzerland) International Organization for Standardization’s scientific contributions. Equipment for distributing fertilizers-test methods-Part 2: Fertilizer distributors in lines. ISO 5690-2-1984[S]. 1984.
[28] American Society of Agricultural and Biological Engineers Procedure for measuring distribution uniform and calibrating granular broadcast spreaders: ISO ASAE S341.2[S]. 2006.
[29] 徐向宏,何明珠.试验设计与Design-Expert、SPSS应用[M]. 北京:科学出版社,2010.
[30] 任露泉.回归设计及其优化[M].北京:科学出版社,2009.
[31] 秦朝民,刘君辉.离心式撒肥机撒肥部件研究设计[J].农机化研究,2006(10):100-102.
Qin Chaomin, Liu Junhui. Study and design on spreading mechanism of centrifugal fertilizer spinner[J]. Journal of Agricultural Mechanization Research, 2006(10): 100-102. (in Chinese with English abstract)
Design and experiments of the centrifugal side throwing fertilizer spreader for lotus root fields
Zhang Guozhong1,2, Wang Yang1,2, Liu Haopeng1,2, Ji Chao1,2, Hou Qunxi1,2, Zhou Yong1,2
(1.430070,; 2.430070,)
Mechanized fertilization has widely been one of the most important steps for the high yield of crops. In this study, a centrifugal side throwing fertilizer spreader was designed for the lotus root field. Firstly, atheoretical model was established for the force of a single fertilizer particle on the blade. The main parameters were then determined for the particle motion, such as the rotating speed of the fertilizer tray, the blade inclination angle, and the blade deflection angle. Secondly, EDEM discrete element simulation software was utilized to optimize the performance of the spreader. A single factor test was carried out, where the fertilizer feed rate and the above factors were taken as the influencing factors. The results showed that the fertilizer increased first and then decreased in a single statistical area when taking the center of the spreader as the origin along the throwing direction. Specifically, the quality of fertilizer with the most distribution in a single statistical region was called the peak value, and the distance between this region and the fertilizer spreader was called the peak distance, to accurately quantify the distribution index of fertilizer. The rotating speed of the fertilizer tray and the blade inclination angle posed a significant impact on the peak value and peak distance of fertilizer distribution, whereas, the blade deflection angle and feed rate on the peak value. An orthogonal rotation simulation test was carried out with the uniformity variation coefficient and peak distance as the evaluation indexes. It was found that there was an extremely significant influence on the uniformity variation coefficient (<0.01), including the rotating speed of fertilizer tray, the blade inclination angle, the blade deflection angle, the interaction between them, the interaction term between the inclination angle of blade and feeding rate, as well as the quadratic term of blade inclination angle. There was an extremely significant effect on the peak distance (<0.01), including the rotating speed of fertilizer tray, the blade inclination angle, and the quadratic term, the quadratic term of feeding rate. Design-Expert software was utilized to optimize the structure of the spreader. The blade structure parameters were then calculated to minimize the uniformity variation coefficient, when the peak distance was 10 and 21 m, the blade inclination, and deflection angle were 8.5° and 17.5°, 11.5° and -1.9°, respectively. Subsequently, the simulation and actual fertilizer application were carried out to evaluate the performance of the fertilizer spreader with the optimal structural parameters. The simulation results show that the uniformity variation coefficient, peak distance, and working width were 19.43%, 21 m, and 29 m, respectively, when the rotating speed of the fertilizer tray was 1 250 r/min, and the feeding rate was 0.316 kg/s. By contrast, the specific parameters in an actual contrast test were 21.95%, 18.6 m, and 24.5 m, respectively, where the errors with the simulation were 12.95%, 11.42%, and 15.51%, respectively. A performance test of fertilizer spreader was carried out with large particle urea, compound fertilizer, and phosphorus fertilizer commonly used in lotus root field topdressing. The results showed that the operation effect of large particle urea was better at 1 300 r/min, feeding rate of 0.15 kg/s, and operation width of 24 m. At this time, the uniformity variation coefficient was 24.56%. The analysis of variance showed that the rotating speed of fertilizer tray, feeding rate, fertilizer type, and the interaction term between fertilizer type and feeding rate presented an extremely significant impact on the coefficient of variation (<0.01). The rotating speed of fertilizer tray, feeding rate, and type presented an extremely significant impact on the operation width (<0.01). The finding can provide an important reference for the design of fertilizer spreading machinery in the lotus root field.
agricultural machinery; discrete element; lotus root field; side throwing fertilizer spreader; peak distance
张国忠,王洋,刘浩蓬,等. 离心侧抛式藕田撒肥器设计与试验[J]. 农业工程学报,2021,37(19):37-47.doi:10.11975/j.issn.1002-6819.2021.19.005 http://www.tcsae.org
Zhang Guozhong, Wang Yang, Liu Haopeng, et al. Design and experiments of the centrifugal side throwing fertilizer spreader for lotus root fields[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(19): 37-47. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2021.19.005 http://www.tcsae.org
2021-03-10
2021-08-22
国家特色蔬菜产业技术体系专项资助项目(CARS-24-D-02),湖北省高等学校优秀中青年科技创新团队计划项目(T201934)
张国忠,教授,博士生导师,研究方向为现代农业装备设计与测控。Email:zhanggz@mail.hzau.edu.cn
10.11975/j.issn.1002-6819.2021.19.005
S224.21
A
1002-6819(2021)-19-0037-11
猜你喜欢
中国畜牧杂志(2022年10期)2022-10-12
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
民用飞机设计与研究(2020年4期)2021-01-21
现代计算机(2020年12期)2020-06-08
新课程·中学(2019年7期)2019-09-17
电子制作(2019年9期)2019-05-30
物理教学探讨(2018年1期)2018-02-13
速读·中旬(2015年10期)2015-10-21
中学生数理化·高考版(2008年2期)2008-11-01
