
基于GIS的双通道遥感地形影像高速采样系统设计
2021-12-27 02:32:06文良军
经纬天地 2021年5期
文良军
(佛山市测绘地理信息研究院,广东 佛山 528000)
0.引言
地质调查是一项具有战略意义的综合基础性工作,地形勘探是地质调查的基本工作内容之一。地形是指分布在地表上的各种形态,特别是在地表以上的固定物所表现的高低起伏的各种状态。地势不同于地貌,地貌也不同于陆地表面的各种形态,统称地形。其中,表面起伏的形式称为地势,表面起伏的形式也称为地貌[1]。为获取更为精确的地形数据,采用遥感技术对地形进行采样,研制了一套遥感地形图像采样系统。取样是将时间域或空间域中的连续量离散化的过程,通过照相方法得到目标地区的地形采样结果。
目前,国内外关于双通道遥感地形图像采集系统的研究成果比较多,主要有基于IDL的采样系统、基于FPGA技术的采样系统和基于三维建模技术的采样系统等,但对双通道遥感地形图像采集系统的研究起步较晚,相关学者在研究中也发现了一些问题,其中包括采样速度慢、采样精度不高等,因此将GIS(geographic Information System,GIS)技术引入到传统采样系统中。GIS是一种具有广泛应用前景的空间信息系统[2]。该系统是在计算机硬件、软件系统支持下,采集、存储、管理、操作、分析、展示和描述地球表面全部或部分空间地理分布数据的技术系统。利用GIS技术提高双通道遥感地形图像高速采样系统的精度和速度,从而为中国的地形勘探工作提供精确的参考数据。
1.双通道遥感地形影像高速采样硬件系统设计
双通道遥感地形影像高速采样系统中的双通道是一种能够让电脑性能增加的技术,将多个串联存储单元改进为并行存储单元,从而获得更大的带宽。然后,利用GIS技术分别从硬件、数据库和软件三个方面对遥感地形图像高速采集系统进行了优化设计。
1.1 主控芯片DSP选型
TMS320DM642是一种高性能、低功耗、高性价比的数字信号处理器。它拥有丰富的硬件资源,具有I2C、PCI、HPI、网络端口、串口等多种接口[3]。DM642特别适用于视音频处理、网络处理等,芯片的参考资料和软件支持非常丰富,其性能足以满足优化系统的设计要求,因此选择DM642作为主控盘。
1.2 遥感相机搭载设备选型
在双通道高速遥感地形图像采集系统中,无人机作为遥感相机的载体设备来实现遥感地形图像的采集,因此在无人机飞行过程中应尽量保证相机设备的稳定。遥感相机承载着无人机的机身,主要包括机身、起落架和云架,云架是承载热红外相机等传感器的平台。多旋翼无人机机身的合理性直接关系到其可靠性和图像等遥感影像产品的质量。主要结构参数主要包括主体材料、结构布置等。通过对主体材料的综合比较,确定主体材料为碳纤维[4]。为提高无人机遥感地形图像采集系统的机动性,确定无人机的布局形式为X型;为提高无人机遥感图像采集系统飞行中摄像机的稳定性,确定无人机机身桨盘布局为倾斜式;为缩小无人机遥感图像采集系统室外作业的体积,确定无人机机身折叠方式为伞式折叠。无人机平台所需的载荷约为800克,这取决于摄像机的重量和稳定的云台(云台承载着相当重量和尺寸的摄像机)。通过调查发现,无人机机体轴距为700mm,能够满足载荷要求,因此确定无人机轴距为700mm。此外,在力学方面,发动机缸体和螺旋桨之间的尺寸关系(如图1所示):
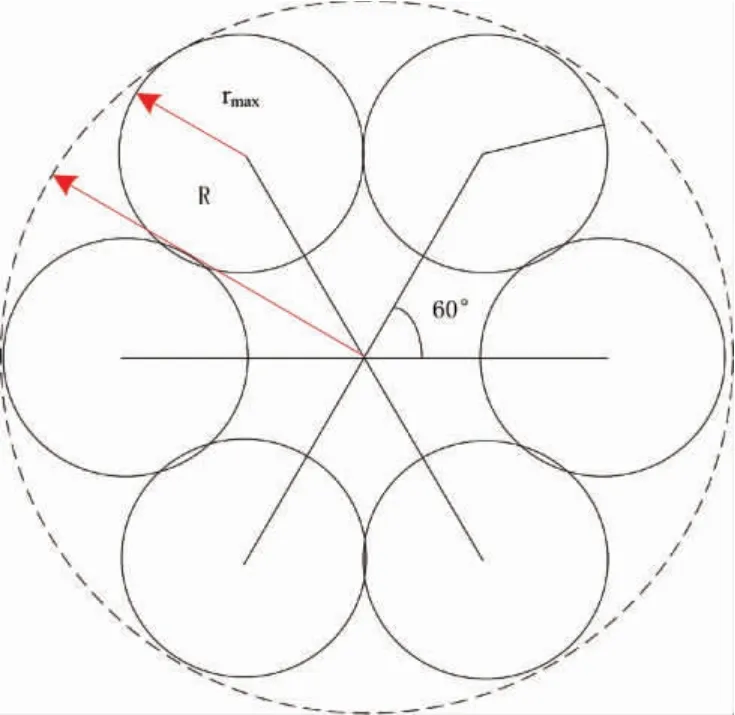
图1 机身主体与螺旋桨之间的尺寸关系图

式(1)中,采用了最大半径范围[1.05rp,1.2rp]控制无人机螺旋桨,其中rp为螺旋桨实际半径[5]。
1.3 遥感相机云台选型
在选择过程中,遥感相机支架必须满足支架结构中相机框架的尺寸。足以容纳ADC Lite相机以及相机电源系统可以驱动200g以上负载两个条件。遥感相机遥摄倾斜的基本稳定原理(如图2所示):
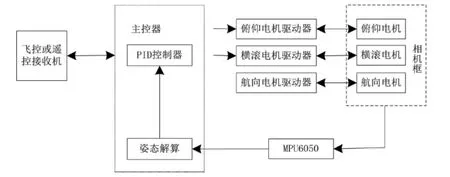
图2 遥感相机云台稳定原理图
1.4 遥感地形影像采样与处理设备
视频传感器和图像采集卡构成了遥感地形图像采集单元。系统通过电缆与CPU的图像采集接口相连,实现了地形图像的实时采集。图像采集卡的工作原理是利用高光谱成像技术实现对目标图像几何特征和光谱特征的同步采集。首先,利用成像设备在入射狭缝中对地面目标进行成像,以入射狭缝作为确定视场;然后,通过准直镜和分光组件将目标辐射按不同波长进行分离;最后,利用会聚镜对探测器进行成像。该系统由遥感相机承载设备和云平台驱动,实现了对不同位置地物遥感图像的实时成像,处理后存储在系统数据库中。ADC模块作为专用的AD芯片,具有双模拟输入和8位量化输出。采样时钟设计为20.456MHz,采样率设置足够高,以提高等信号带宽模式下遥感信号的信噪比。该芯片具有双通道功能。配置采样时钟边沿触发模式时,可完成同一采样时钟的两路输入输出,两路输出样本间隔排列合并成一路;USB芯片采用内置8051单片机的高速驱动芯片。当采样时钟频率为24MHz时,采样时钟频率为40.912MHz。另外,上位机配置系统采样、量化位数、数据存储速率等参数,可以满足不同数据源遥感影像原始数据后处理软件的要求。
1.5 双通道遥感地形影像存储器
对来自视频处理模块Bt.656格式的有效数据进行解码后,各通道的数据流将由串行信号转换为双向并行信号传输。由于解码后的视频帧需要进一步去噪,因此需要设置视频帧缓冲区,以便后续处理模块对视频数据进行处理。双通道遥感图像高速采集系统需要对采集的图像进行缓存,每个通道采集的图像大小为720×576像素。DDR2帧存储器的整体结构(如图3所示):
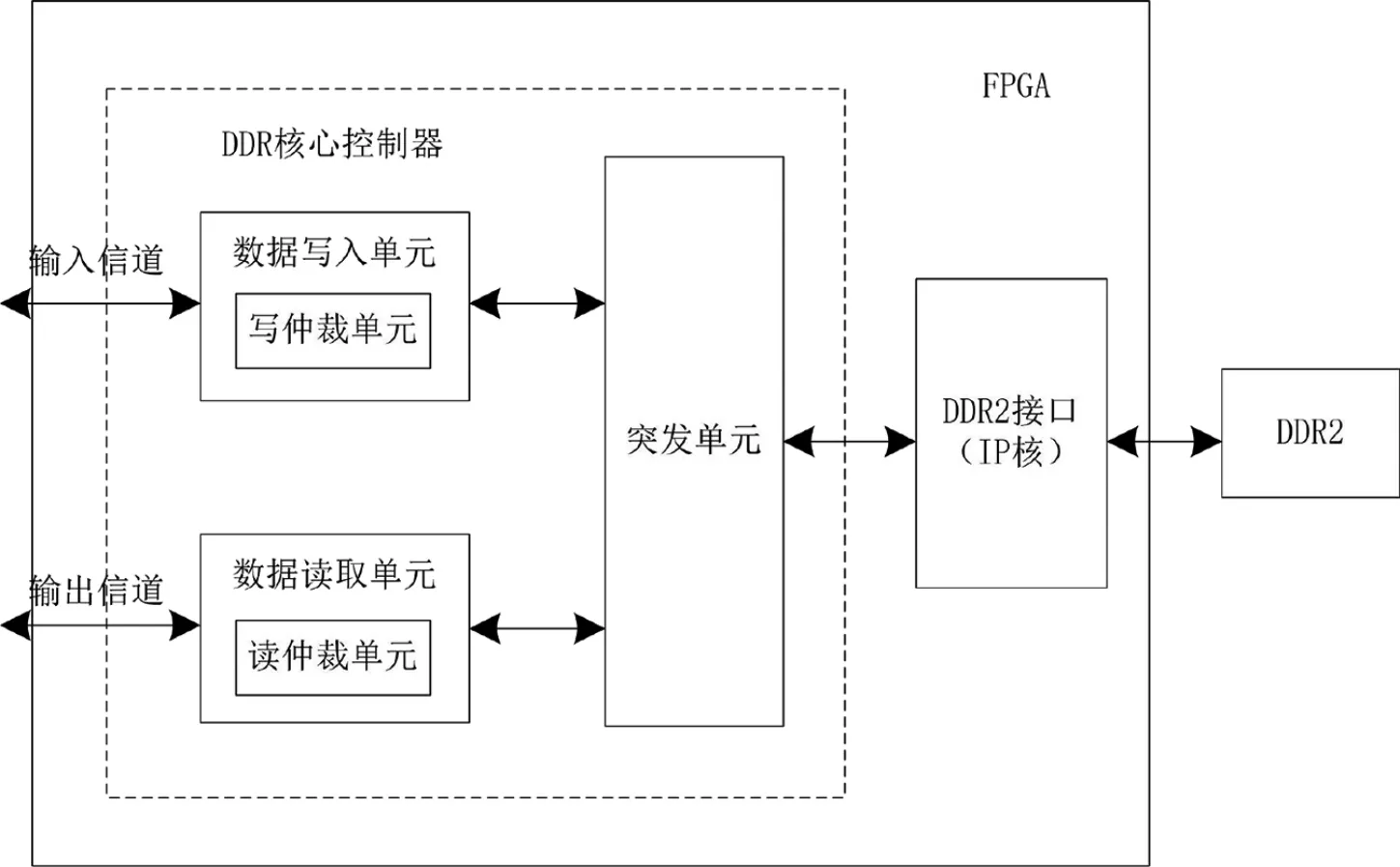
图3 存储器结构框图
存储功能主要包括数据写入单元、视频读取单元、判断读写仲裁单元,DDR2的IP核访问、DDR2实现数据读写。
1.6 硬件系统电路设计
1.6.1 遥感采集电路
为了实现对双信道的地形影像的采样间隔时间的精准控制,选用AD976A芯片作为遥感采集电路的核心设备,该设备具有16bit的转换精度和200kbps的采样率,采集信号输入范围为-10~+10 V,逐次逼近型。遥感采集电路中数字信号和电压之间的转换关系,如公式(2)所示:
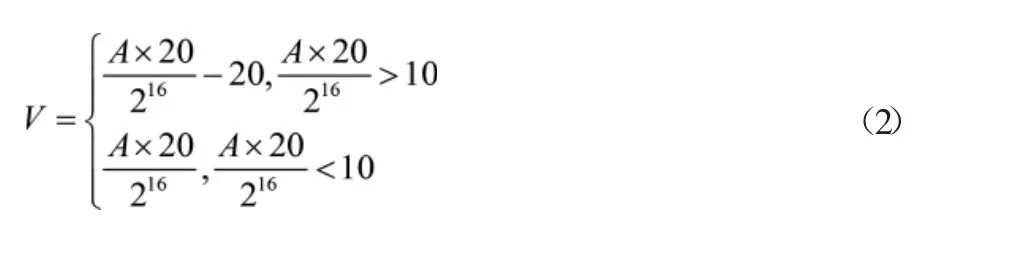
式(2)中,V为遥感采集电路的电压。
建筑工程包含了较多的数据信息,只有将不同建筑工程环节数据进行有效分析与整合,才能确保建筑工程全过程管理的实施效果。然而部分设计师在进行项目图纸设计时,经常因实地考核数据信息不准确,而对图纸设计未能进行规范性的内容标注,导致建筑工程进行全过程项目管理时,存在实际管理与图纸要求不一致的情况,进而需要重新进行相关环节审查与改进,影响到整体建设周期与水平。
1.6.2 PCI总线接口电路
PCI总线接口芯片的连接电路(如图4所示),可以快速将本地总线转换为PCI总线,由FPGA、PLX9054、FIFO和FIFO组成接口连线,并通过FPGA对接口进行时序控制。

图4 PCI总线接口电路图
2.双通道遥感地形影像高速采样系统数据库设计
在系统总体数据方案的指导下,遵循高速双通道遥感图像采集系统数据库的设计原则,为数据服务。数据库的设计应遵循规范化、数据冗余、标准化理论和数据安全的原则。从数据库结构和内容分析,根据地形信息数据采集系统的数据需求和系统管理需求,地形数据采集系统的数据库主要由两部分组成:空间数据,即栅格遥感影像数据和矢量数据;地形信息数据库用于存储采集到的地形信息数据。这些数据存储情况(如表1、表2所示):

表1 遥感地形影像数据要素存储信息表

表2 地形数据块存储结构
3.双通道遥感地形影像高速采样系统软件功能设计
3.1 GIS软件选型
选择UCMap For Android手机GIS类库组件作为GIS软件开发平台,扩展了Android平台上的GIS应用。在移动GIS中,地图是核心部分,由多个层次组成。在实现UCMap For Android时,每个层对应一个FeatureClass空间数据表FeatureClass,每个FeatureClass有两个概念:记录和字段。FeatureClass是特征的集合,其字段分为属性字段和几何字段。属性场由特征值得到,几何场由特征形状得到。一个图层上有很多元素,通常一个图层对应一个符号样式,图层上的所有元素都可以用不同的符号样式绘制,或者UCMap提供不同的渲染工具Rendero。
3.2 采样起始时间可控与采样间隔可变处理
根据目标区域的地形特征和实际需要,对端口进行扩充或缩减处理,由每个端口访问RAM的频率来确定相应端口访问的优先级顺序。按以下顺序计算优先级Y:
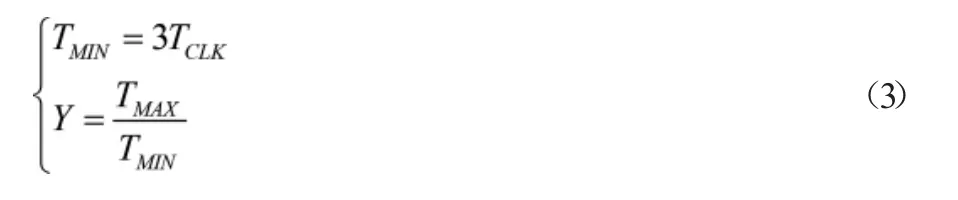
式(3)中,TCLK和TMIN分别为访问RAM的时钟周期和最短时间,而TMAX为以最高优先级数端口访问RAM时间间隔。每个信道根据接收到的注数指令确定开始收集时间。在收到开始脉冲信号和采集开始时间之后,启动控制模块进行判断,当计数器到达开始时间后,向AD芯片发送开始信号,控制采集。注数指令不仅包含了每个信道采集的开始时间,还包含了每个信道采集的间隔时间。工时模块根据不同工时模式,确定不同的采样点。向控制AD芯片采集的模块发送采样点数量,通过判断采集次数结束单周期采样循环。
3.3 双通道遥感地形影像采样结果的可视化输出
连续获取遥感地形影像和定位信息,为每张地形照片实时分配定位信息及其属性信息,属性包括固定属性和可编辑属性。系统在GIS系统下判断自动实时记录数据,可编辑属性由各采样单位根据其位置和时间,结合目标地形类型创建。为更有效地实现对大尺度分散样线的快速采集,系统需要在目标位置窗口中预先设置采样线和采样时间,并与实时显示的目标位置相结合,使其能够在距离预定样线较近的情况下进行快速采集,从而达到高效采集的目的。使用者可在GIS环境下根据需要随时调整图层顺序,配合实时动态显示位置讯号,便于快速到达。将实时双通道遥感地形图像数据存储到系统数据库中,并进行几何校正处理,通过等高线数据采集、等高线数据清理等步骤,将遥感地形图像数据导入3DS MAX软件,形成三维基础地形图。提取各类专题图像,生成符合规范的贴图文件,绘制出三维地形,生成DWF文件,即为双通道遥感地形图像采样结果。
4.系统测试
为了测试设计的基于GIS的双通道遥感地形影像高速采样系统的采样性能,特设计系统测试实验,并分别从采样速度和采样精度两个方面实现对系统运行性能的测试。开发采样系统所用的仿真工具为Modelsim,具有仿真速度快、精度高等特点。在测试硬件时可以使用QuartusII自带的SignaltapII对FPGA进行在线逻辑分析。而SignaltapII的优点就是它能把电路中所有的插针都拉出来,观察信号的变化,同时它还能把信号的采集储存在内部寄存器里。只需通过JTAG将编译后的程序做成FPGA内的寄存器,就可以直接观察到数据的变化,从而提高程序调试的效率,因此,采用Signaltap法来观察系统数据。对GIS技术的操作参数和遥感地形图像采集设备的参数进行了系统开发和调试,具体设置(如表3所示):

表3 系统测试参数设置表
另外,由于优化设计的双通道遥感地形影像高速采样系统应用了GIS技术,因此需要在实验环境中配置GIS技术的运行环境,具体的GIS运行界面(如图5所示):
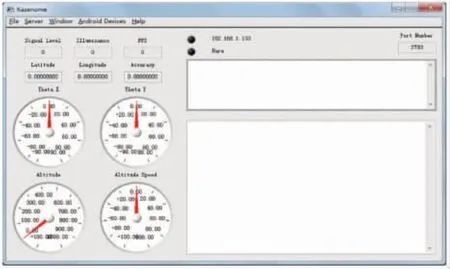
图5 GIS运行主界面
利用系统中的一系列硬件设备,收集实时遥感地形影像,其中设计系统的遥感影像收集结果(如图6所示):

图6 遥感地形影像收集结果
为了形成实验对比,除了设计的基于GIS的双通道遥感地形影像高速采样系统外,还设置了传统的遥感地形影像采样系统以及文献中[5]提出的多通道并行可程控遥感数据采集系统作为实验的两个对比系统,将三个系统以相同的方式进行编码并导入到实验环境中,通过运行得出采样结果,其中设计系统的采样输出结果(如图7所示):
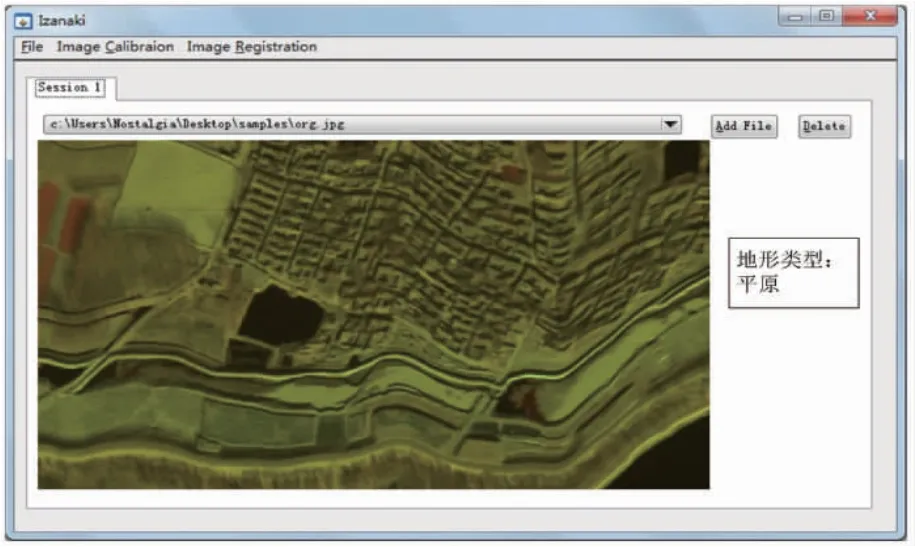
图7 遥感地形影像采样结果
设置系统的测试变量分别为采样精度和采样速度,经过三种系统结果和耗时时间的统计与比对,得出系统测试对比结果(如表4所示):
从表4中可以看出,相比于两个对比系统,设计采样系统采样结果的分辨率更高,即采样精度更高。从采样耗时方面来看,三种采样系统的平均采样耗时分别为71.0s、50.2s和23.0s,相比之下设计系统的采样速度更快。
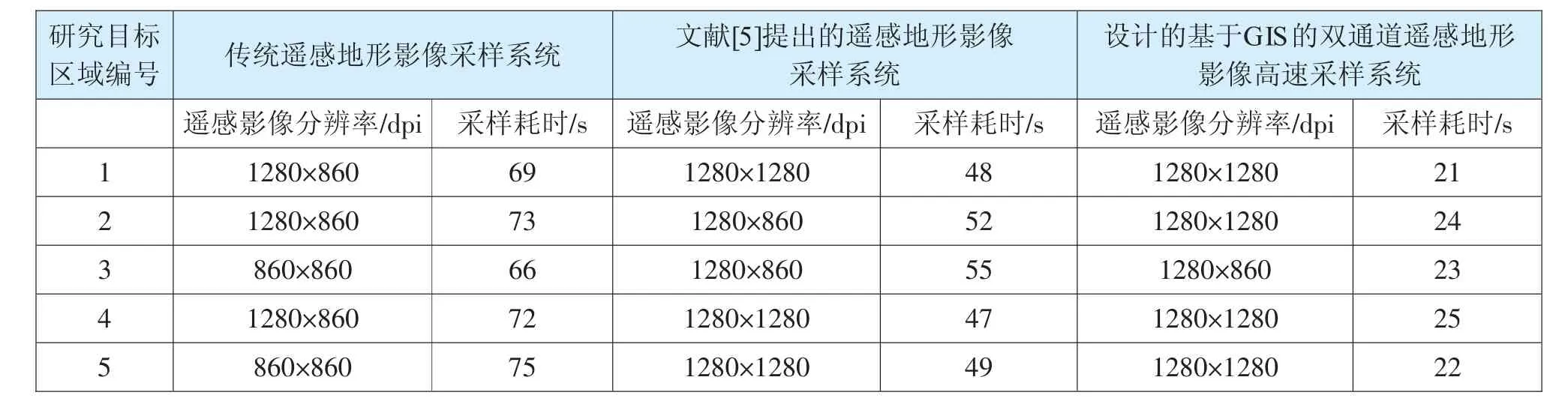
表4 系统性能测试对比结果
5.结束语
综上所述,从系统测试结果中可以看出,设计系统的采样效率具有较高的优势,在实际的地形勘探工作中具有较高的应用价值。
猜你喜欢
黑龙江大学自然科学学报(2022年4期)2022-11-17 08:08:06
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:12
昆明医科大学学报(2021年4期)2021-07-23 01:21:56
机电信息(2020年30期)2020-11-10 04:40:31
作文小学中年级(2020年6期)2020-07-24 08:33:10
科技风(2020年17期)2020-07-04 02:23:16
科学导报·科学工程与电力(2019年44期)2019-09-10 22:32:01
电子设计工程(2015年16期)2015-02-27 12:07:56
自然资源遥感(2014年3期)2014-02-27 11:56:38
教育与职业(2014年31期)2014-01-19 01:48:18
