
基于无人机的航测影像数据异常检查方法研究
2021-12-27 02:31:58姜立芳
经纬天地 2021年5期
姜立芳
(山东省地质矿产勘查开发局第四地质大队,山东 潍坊 261000)
0.引言
随着航拍摄影技术的迅速发展,无人机航测技术能够获取地面目标物体的二维空间信息,以及描述目标物体属性的一维光谱信息,主要用于地质监控、工程巡检、城市交通、环境探测等。无人机低空航测影像数据具有较高光谱分辨率,包含的地物信息丰富,而影像数据异常检测是航测影像处理的重要环节,在航测影像数据中提取出异常信息,为航测目标的检测提供感兴趣区域这一初步识别结果。因此,研究航测影像数据异常检查方法,检查航测影像数据中具有光谱差异的异常信息,具有重要意义[1]。
现阶段,航测影像数据异常检查相关研究已取得较大进展,通过异常检查算法,去除影像数据中的大部分背景信息,分析检查数据与背景数据的光谱差异,结合先验知识区域信息,获得异常数据和背景数据的统计信息。文献[2]采用基于背景纯化的航测影像异常检查方法,利用膨胀操作,得到消除异常点后的遥感影像数据背景信息,但该方法仅参考了扩展数学形态学理念,未完全消除异常点的负面效果,异常检查虚警率较高。文献[3]采用基于背景判别与邻域补偿的航测影像异常检查方法,通过背景差异性判别,筛选航测影像数据局部背景像元,增强背景数据与异常数据的可分性,但该方法异常算子探测过程较为复杂,异常检查虚警概率较高。文献[4]采用基于多窗口融合判别子空间的航测影像异常检查方法,通过正交子空间投影,聚类异常信息,但该方法窗口内数据融合程度不够,异常检查虚警率同样较高。
针对以上问题,在以上理论的基础上,提出基于无人机的航测影像数据异常检查方法,预处理无人机航测影像,降低数据维数,逐行提取异常像素点,降低异常检查虚警概率。
1.基于无人机的航测影像数据异常检查方法设计
1.1 基于无人机预处理航测影像数据
利用无人机获取航测影像数据,对航测影像进行匀光匀色、几何校正等。通过无人机倾斜摄影,采集航测影像数据,在无人机上安装工业照相机,设置航测技术参数。航高计算公式如公式(1)所示:

式(1)中,a为照相机焦距,c为影像的像元尺寸,A为影像的地面分辨率,其中地面分辨率由测图比例尺决定。根据测区范围大小,确定无人机航线航向、飞行距离,航测基线长度D、间隔宽度G计算公式如公式(2)所示:

式(2)中,L1、L2分别为影像的像幅长、宽;p1、p2分别为航向、旁向重叠度,其中p1、p2的取值分别满足60%~80%、15%~60%。
无人机航拍结束后,对航拍的影像数据进行编号,记录每一张航测照片曝光点的时间、姿态角、经纬度等信息,剔除无用数据后,使用文本编辑器的COORD GM工具,把大地坐标转换为平面坐标。旋转像片方向,使其与照相机参数保持一致,对像片进行匀光匀色处理,使用Inpho软件的Ortjho Vista模块,减小航测影像热斑效应,去除水域反射效应,降低单张航测影像的透镜渐晕效果,平衡亮度和颜色。采用几何配准的方法,几何校正影像数据,在影像序列中选取一幅图像,将其作为基准数据,选择基准数据中的控制点集,采用三次多项式配准算法,配准控制点集与其他影像,筛选出配准误差在3个像素以上的像素点,采用近距离重赋值方法,选取空间距离最近的像素点样本值,对几何误差较大的点进行重赋值,控制配准误差在3个像素以内。采用绝对辐射的方式,根据定标系数,计算辐射定标方程,校正航测影像数据辐射值至大气反射率。辐射定标方程表达式如公式(3)所示:

式(3)中,λ为影像波段号;L(λ)为辐射定标后,航测影像数据的辐亮度值;E(λ)为无人机航拍时,照相机接收到的像元值;F(λ)为辐射定标增益值;B(λ)为辐射定标偏置值。通过公式(3),修改影像数据辐射范围,消除照相机传感器因性能原因带来的误差。至此完成基于无人机的航测影像预处理。
1.2 降维航测影像数据
结合准则函数和决策融合,降低预处理后的航测影像维数。使用低通模板,对航测影像进行噪声滤除,频域滤波影像数据,获得航测影像的噪声协方差阵,角化处理后得到影像数据正交矩阵,再对其进行线性变换,得到航测影像协方差阵,降序排列影像数据本征向量,表达式如公式(4)所示:

式(4)中,f为影像本征向量降序排列的对角矩阵;D为航测影像噪声协方差阵;K为本征向量的正交矩阵;U1为噪声协方差阵至正交矩阵的变换矩阵;V为航测影像协方差阵;U2为正交矩阵至影像协方差阵的变换矩阵。通过公式(4),令对角矩阵f的第一分量集中大量目标数据,分离影像目标信号与噪声信号,使滤波后的数据聚类在有限特征集,且本征向量中的各个元素没有关联。
航测影像中的噪声点分离完毕后,对数据进行降维处理。采取准则函数,去除包含目标数据少的波段,将准则函数划分为信息量最大原则、类别可分性原则两类。针对信息量最大原则,计算航测数据每个像元的熵值,熵值越大,判定像元包含信息量越多,再计算每个像元的方差,方差越大,判定波段之间的相关性越强,即不同波段之间存在大量冗余的目标数据,根据熵值和方差,筛选信息量大且不相关的波段,针对类别可分性原则,统计不同波段之间的标准距离、Matusita距离,组合距离小的波段,形成波段组[5]。采用决策融合法,对波段组进行映射,选取不相关的正交向量,线性表示影像数据的目标信息,对正交向量进行正交线性变换,把彼此相关的目标信息,变换为正交且独立的数据参量。决策函数表达式如公式(5)所示:

式(5)中,Z为影像正交向量;数据向量为Z=[z1,…zd,…zn];n为航测影像数据源数量;L(Z)为数据向量的决策函数;F表示数学期望;ui、Ii分别为波段i的像素点灰度值、灰度均值;uj、Ij分别为波段j的像素点灰度值、灰度均值;Pd为第d个数据参量的权值;ed为第d个参量的决策值;q表示zd属于ed的后验概率。通过公式(5),把波段组投影到一个低维空间,高层次融合航测影像,保持航测影像原始信息高空间分辨率的同时,降低数据维数,实现数据量的压缩。至此完成航测影像数据的降维。
1.3 检查航测影像数据异常像元
应用稀疏系数修正函数,检查低维影像数据的异常像元。采用因果滑动窗口,遍历航测影像数据,设航测影像第m个像元元素为Xm,因果滑动窗口的长度为b,滑动窗口具体实施过程(如图1所示):
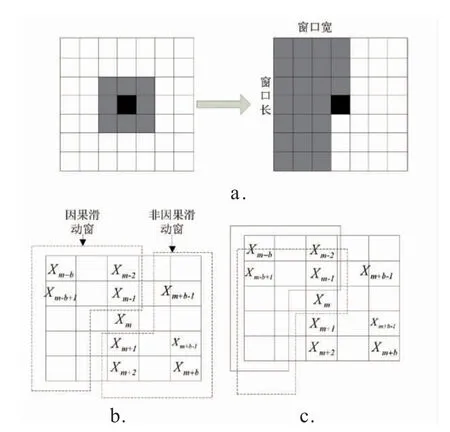
图1 滑动窗口逐行检查过程
图1(a)中黑色区域为待检查的影像数据像元,灰色区域为因果滑动窗口统计的背景信息,将待检查像元Xm作为窗口中心,把背景信息划分为非因果滑动窗、因果滑动窗两部分,(如图1(b)所示),沿着垂直方向滑动左半部分的因果滑动窗,使窗口中心像元由Xm移动至Xm+1,(如图1(c)所示),此时窗口内大部分影像数据未发生变化,仅移出顶行元素Xm-b,…,Xm-2,再将新一行影像数据像元元素,移入以Xm+1为中心的因果滑动窗内。沿着图1所示的推扫轨迹,以一行为间隔,不断平移因果滑动窗,使滑动窗口覆盖数据两端,直至所有航测影像数据检查结束。
采用稀疏系数修正的异常检查方法,检查窗口内影像数据的像元元素,训练影像数据信号样本,利用最优方向法,对航测影像中的背景像元信息进行字典学习,构建完备字典,在全局航测影像中,随机选择背景像素作为字典原子,确保字典能够体现航测影像数据信号的内在特征,满足字典与稀疏表示的互相关条件要求。使用深度学习堆叠自编码器,将最小化字典原子系数期望作为约束项,对航测影像的像素进行稀疏分解,计算每个像元的稀疏表示系数Q如公式(6)所示:

式(6)中,E为字典原子系数期望;I为因果滑动窗口内的像元个数;H为字典内原子个数;l1、l2分别为窗口内、窗口外的影像数据光谱波段数。利用字典惩罚函数,对字典原子进行惩罚约束,提取影像数据非线性特征,混合后得到字典的特征空间,获得稀疏表示误差,将其作为光谱数据的异常算子。稀疏系数修正函数表达如公式(7)所示:

式(7)中,J表示稀疏系数修正函数;R为窗口内中心像元的信号误差;t为信号误差阈值;M为降维后影像数据的信号维度;P为信号基向量;O为基向量系数。当J值大于字典的稀疏度阈值时,判定窗口内中心像元Xm为正常像素,当J值小于稀疏度阈值时,判定窗口内中心像元Xm为异常像素,即为影像数据中的光谱异常数据。至此完成航测影像异常像元的检查,实现基于无人机的航测影像数据异常检查方法设计。
2.实验论证
将此次设计方法与基于背景纯化的航测影像异常检查方法、基于背景判别与邻域补偿的航测影像异常检查方法、基于多窗口融合判别子空间的航测影像异常检查方法进行对比实验,比较四种方法航测影像数据异常检查虚警概率。
2.1 设计方法异常检查
选取某城市的滑坡实景作为航测对象,采集该滑坡航测数据,该滑坡由东南向西北高度递减,海拔在2500m~2900m之间,地质特征为积石山,研究区域内交通便利。设计方法为使用无人机航拍滑坡影像,选择CW-15型垂直起降固定翼无人机,配置DG4PRO五镜头照相机,包括1个正视镜头和4个环视镜头,使用挂钩连接照相机和无人机,照相机传感器尺寸为39.5mm×25mm,曝光方式为等时曝光,总像素和单镜头像素分别为2.0亿个、4100万个,设定的无人机和照相机技术参数(如表1所示):
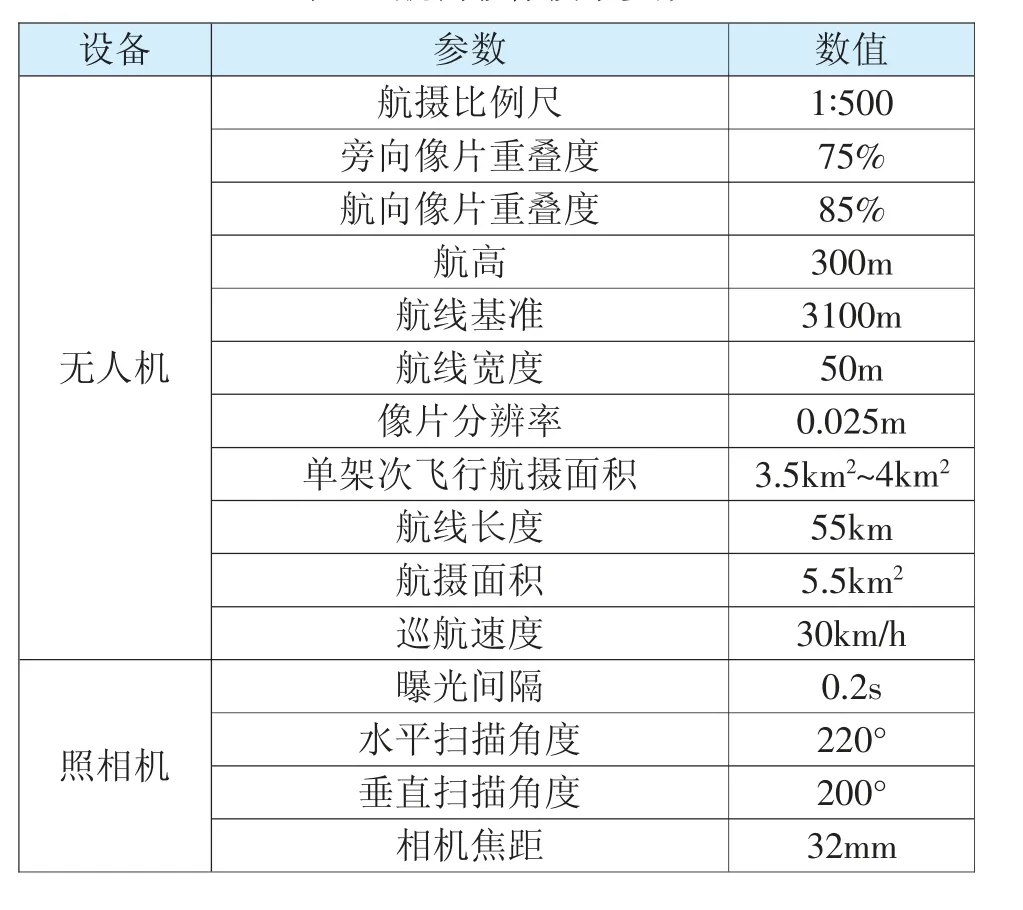
表1 航测影像技术参数
结合本文上述内容,对63746张滑坡影像数据进行预处理,处理结果(如图2所示):
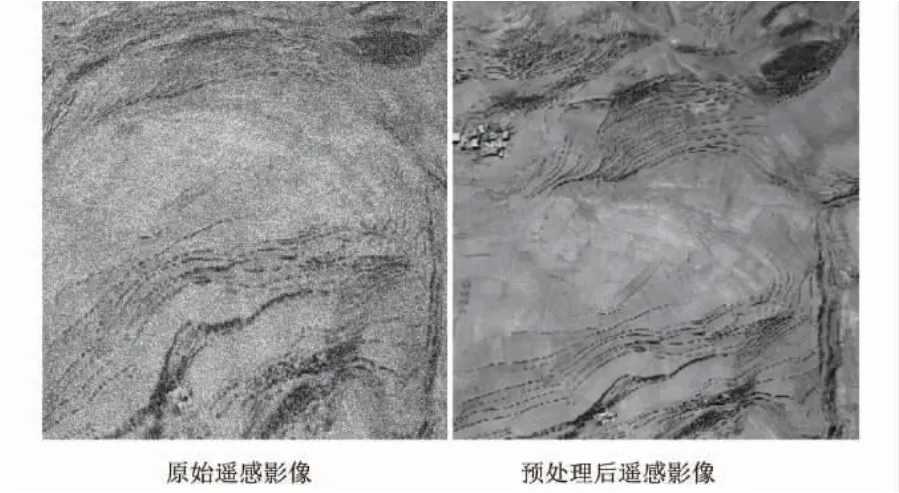
图2 滑坡影像显示
由图2可以看出:预处理后的影像去除了大量噪声点,且消除了几何畸变和辐射畸变。结合稀疏系数修正的异常检查方法,设计相关程序,实现数据异常像元都检查。结果(如图3所示):
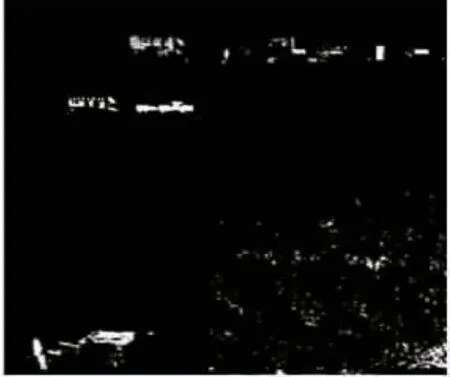
图3 航测影像异常检查结果
图3中黑色区域为正常的背景像素,白色区域为光谱存在异常的像素点,可作为航测影像中检查目标的感兴趣区域。
2.2 实验结果分析
等面积划分滑坡航测区域,对各区域进行编号,用四种方法对滑坡航测影像异常检查完毕后,比较数据异常检查的虚警率,虚警率计算如公式(8)所示:

式(8)中,S1、S2分别为检出航测影像中的正常像元个数、异常像元个数。针对滑坡区域的80维可见影像,四种方法的检出像元(如图4所示):
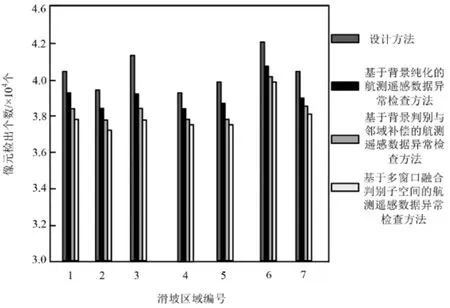
图4 80维航测数据异常检出统计结果
分别划分四种方法检出像元中的正常像素点、异常像素点,代入公式(8),得到虚警率实验对比结果(如图5所示):
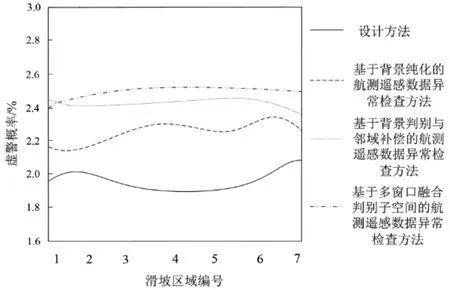
图5 80维航测数据异常检查虚警概率实验结果
由图5可知:针对80维可见航测影像,设计方法航测影像数据异常检查平均虚警概率为1.97%,基于背景纯化的航测影像异常检查方法平均虚警概率为2.25%,基于背景判别与邻域补偿的航测影像异常检查方法平均虚警概率为2.41%,基于多窗口融合判别子空间的航测影像异常检查方法平均虚警概率为2.45%。相比其他三种方法,设计方法虚警概率分别减少了2.28%、0.44%、0.48%。
针对滑坡区域的75维短波航测影像,四种方法检出像素点总数量(如图6所示):
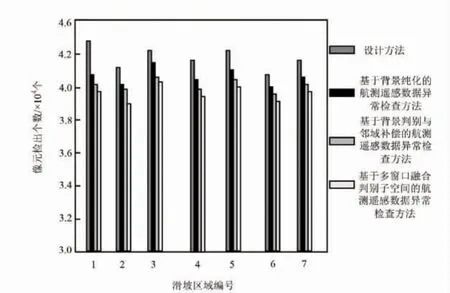
图6 75维航测数据异常检出统计结果
划分检出像元中的正常像素点数量、异常像素点数量,得到四种方法的虚警概率实验对比结果,具体(如图7所示):
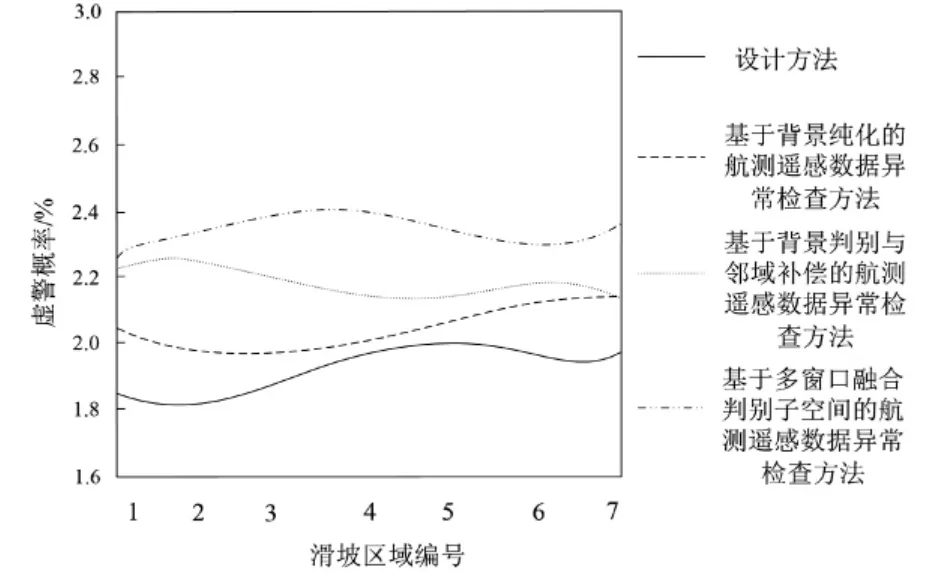
图7 75维航测数据异常检查虚警概率实验结果
由图7可知:针对75维短波影像,设计方法航测影像数据异常检查平均虚警概率为1.94%,另外三种方法平均虚警概率分别为2.07%、2.19%、2.36%,设计方法虚警概率分别减少了0.13%、0.25%、0.42%。
3.结束语
此次研究利用无人机获取航测影像,降低了航测影像数据异常检查的虚警概率,保证了异常像素点的检出准确性。但此次设计方法仍存在一定不足,在今后的研究中,会结合航测影像光谱特征,充分运用航测影像数据的空间纹理特征,考虑像元数据为同一类型的情况,进一步提高正常像素点和异常像素点的分类准确性。
猜你喜欢
家教世界(2023年28期)2023-11-14 10:13:50
家教世界(2023年25期)2023-10-09 02:11:56
兵工学报(2022年11期)2022-12-01 12:52:12
物联网技术(2019年9期)2019-11-06 06:24:49
电脑知识与技术(2018年35期)2018-02-27 13:29:44
科学与财富(2017年24期)2017-09-06 09:52:35
设备管理与维修(2017年1期)2017-04-11 03:21:42
自动化学报(2017年11期)2017-04-04 02:52:44
创新作文(小学版)(2016年19期)2016-08-22 05:54:08
读者(2016年14期)2016-06-29 17:25:50
