航天测控雷达标准开放系统架构研究
2021-12-25 05:15黄璐王洋金胜王玥
航天标准化 2021年3期
黄璐 王洋 金胜 王玥
(北京跟踪与通信技术研究所,北京,100094)
1 引言
航天测控雷达担负着飞行器飞行过程中的运动轨迹参数(位置、速度等)、目标特性参数等的获取任务,可为评定飞行器的技术性能和精度、改进设计提供数据,为指挥系统提供监视、显示信息,为应用系统提供有关数据等。传统航天测控雷达因承担的任务不同而导致技术状态差异较大,建设方式多为单台套研制,一般都采用封闭/半封闭的体系架构,系统功能和装备架构紧耦合,具有 “一事一雷达”、 “一套一方案”、 “各型各保障”、 “出厂定终身”等特点,因此改造升级实施难、拓展提高潜力小、维修保障工作繁杂。
雷达标准开放式系统架构的概念最早由美国麻省理工学院的林肯实验室(Lincoln Laboratory)提出,包括雷达系统的开放系统架构(ROSA,Radar Open System Architecture)和雷达信息处理系统的实时开放系统架构(ROSAII,Realtime Open System Architecture)。美 军 在 雷达的研制生产中大量采用开放式体系结构的设计理念,在提高装备性能、缩短研制周期、降低研发成本的同时还具备了便于升级维护、利于军民通用等诸多益处。我国电子装备模块化工作开展较晚,目前已制定了相应标准,雷达模块化技术标准体系初步形成。但由于电子技术发展更新快,现有模块难以在新研制产品中推广使用,导致大部分雷达模块标准只在编制单位内部使用,未能在行业推广。2015年起,国内各雷达研制单位开展了软件化雷达技术的研究工作,涉及体系架构、试验平台、相关规范等,为软件化雷达后续工作奠定了良好的基础。
2 航天测控雷达系统标准开放硬件架构
以精密跟踪与成像测量雷达和固态有源数字阵列相控阵雷达两种典型的航天测控雷达为例,遵循功能和物理结构相对独立的设计思路,航天测控雷达硬件架构可由3大部分组成:射频前端、高速数据传输、高性能信息处理后端,具体架构如图1所示。其中,射频前端因两种雷达体制不同采用不同的硬件架构;高性能信息处理后端采用开放式一体化标准处理架构,以统一的硬件平台为基础,以标准的总线结构实现内外层数据交换,通过软件实时加载实现后端信息处理的开放和扩展。
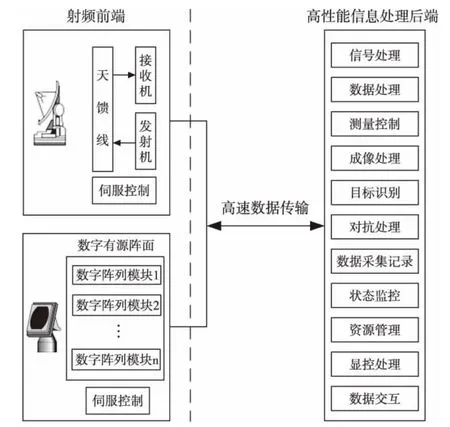
图1 航天测控雷达系统开放硬件架构组成框图
2.1 精密跟踪与成像测量雷达
按照航天测控雷达系统的功能分解设计标准开放系统架构,将精密跟踪与成像测量雷达分解为多个分系统,如图2所示。各分系统的功能和组成见表1。
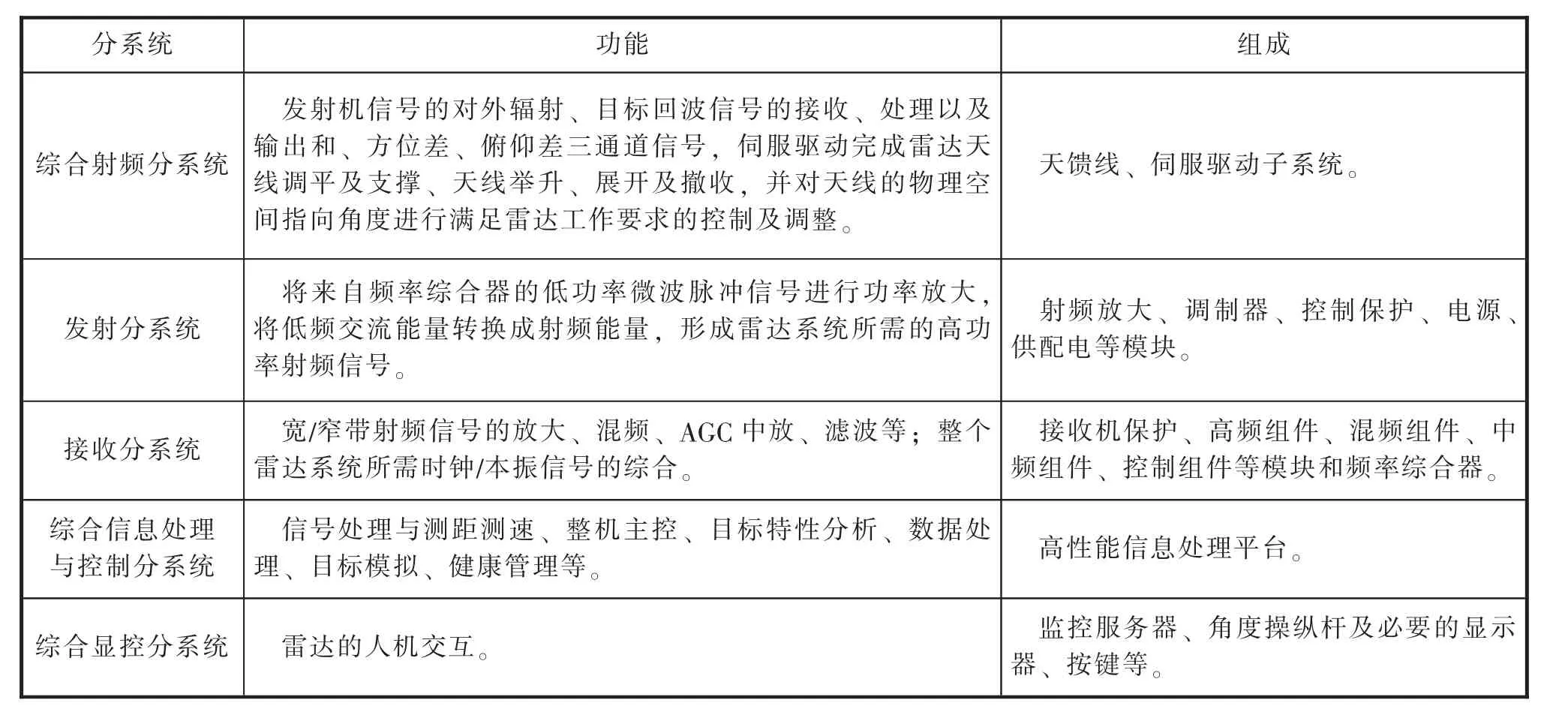
表1 精密跟踪与成像测量雷达分系统功能和组成
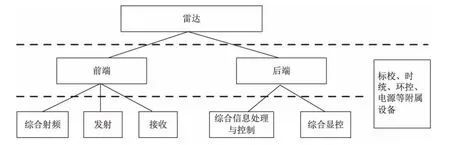
图2 精密跟踪与成像测量雷达分系统组成框图
2.2 固态有源数字阵列相控阵雷达
按照航天测控雷达系统的功能分解设计标准开放系统架构,将固态有源数字阵列相控阵雷达分解为多个分系统,如图3所示。各分系统的功能和组成见表2。
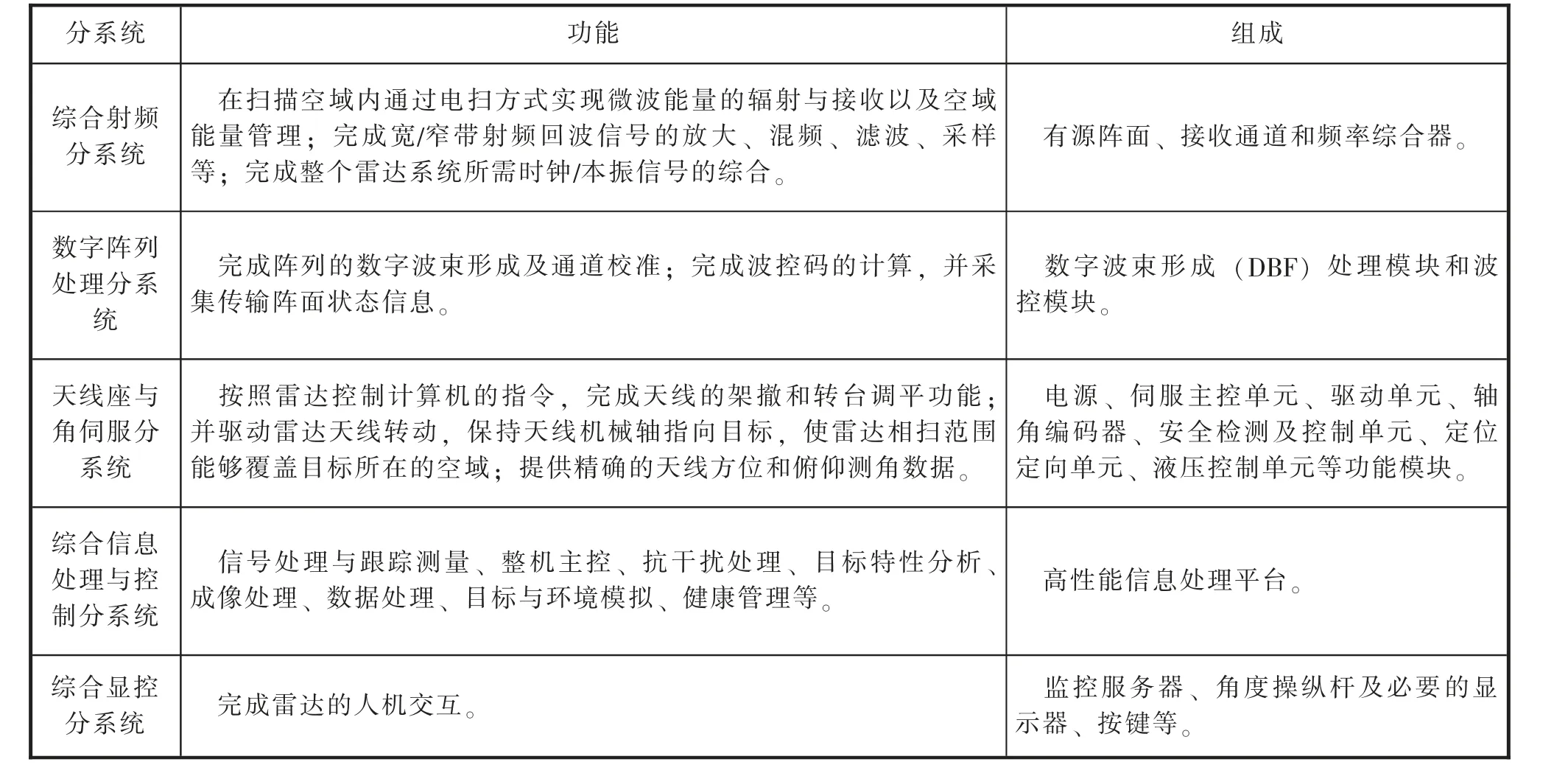
表2 固态有源数字阵列相控阵雷达分系统功能和组成

图3 固态有源数字阵列相控阵雷达分系统组成框图
2.3 高性能信息处理平台架构
高性能信息处理平台采用一体化设计,如图4所示,是为航天测控雷达后端所有数据计算、处理和业务应用提供有机集成的综合性平台,对雷达的计算资源和处理资源进行集中管理和控制,为信号处理、数据处理、测量控制、成像处理、目标识别、对抗处理、数据采集记录、状态监控、资源管理、显控处理、数据交互等功能提供统一的支撑和部署。能够连接和贯通系统中除雷达探测前端之外的所有处理过程和环节,实现系统业务处理的一体化。
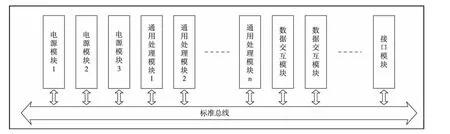
图4 高性能信息处理平台架构
高性能信息处理平台由一系列开放式、标准化模块组成,主要包含通用处理模块、数据交互模块、接口模块、电源模块。
a)通用处理模块:
完成雷达一体化综合信息处理,包括FPGA处理模块、数字信号处理器(DSP)模块、中央处理器(CPU)模块等。b)数据交互模块:
实现各模块之间的高速数据传输/交换,提供系统各处理节点间高速数据通讯链路,满足系统实时大数据量通讯要求。c)接口模块:
实现高性能信息处理平台的对外接口通信。d)电源模块:
提供系统工作所需的电源供给,可用一个或多个电源模块供电。平台采用通用模块化设计和标准主流的总线结构,将各模块间的交换式总线互连实现高速数据通讯、系统控制与资源调度、系统工作健康状态监测管理等功能,具有架构统一、模块接口标准、扩展灵活、系统裁剪方便等特点。
3 航天测控雷达系统标准开放软件架构
3.1 软件总体架构
根据航天测控雷达标准开放体系架构对雷达进行了模块化分解,并将这些模块用各种标准接口联系起来,使得相同模块可应用于不同型号雷达,以降低生产维护成本、缩短开发周期。而要真正达到这一目的,软件系统的开放性、可移植性至关重要。
由于雷达系统中存在多种编程平台,如FPGA、DSP、GPU、CPU等,而软件直接跨平台比较困难。因此,在跨平台模块化设计中,软件系统存在两种集成方式,如图5所示:①紧耦合:将模块软件与模块硬件强制绑定在一起,形成一个共同的模块,符合相应的接口规范。②松耦合:对软件进行层次划分,将与硬件结合紧密的层次构件与硬件模块绑定,在此层次之上构建跨平台通用化的软件系统。
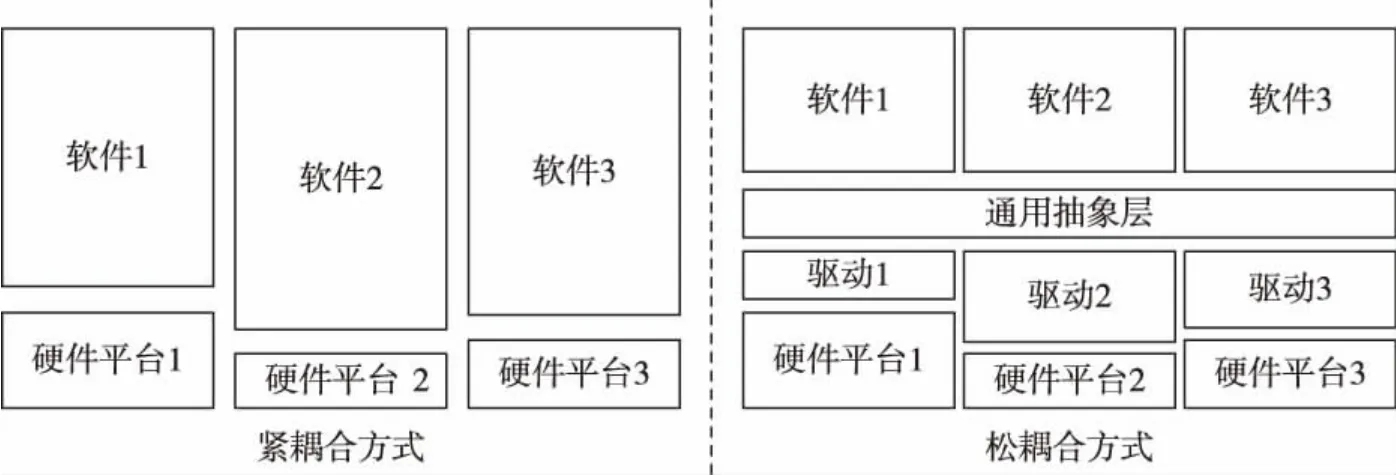
图5 跨平台软件系统设计的两种方式
这两种方式均符合航天测控雷达标准开放体系架构对模块化和标准化的要求。考虑到雷达后端处理的流程和方法较为通用,且后端处理是雷达开发与维护的重点,因此其软件的可移植性和可重用性至关重要。但紧耦合方式没有进行跨平台的软件代码重用,要将相同功能的软件移植到不同的硬件平台上比较困难,移植所需的开发周期长。松耦合方式在软件可移植性、可重用性上收益比较大,因此开放式雷达的软件系统必须以软硬件的松耦合方式为主。
松耦合的软件体系结构需要尽可能降低功能模块与硬件平台的耦合关系,需要在功能模块与硬件平台之间构建多层抽象架构,从而解除功能模块对硬件平台的直接依赖。标准开放式软件体系结构包含5层,如图6所示。

图6 标准开放软件体系结构
a)物理资源层:
负责板级驱动和内存管理,提供屏蔽计算机硬件平台和通信差异的操作系统、设备驱动、通信等功能,由硬件模块厂家配套提供。b)支撑软件层:
包括实时操作系统、数据库、编译器、调试环境、软件模拟环境、软件工具链等。支撑软件层为系统应用提供可用性强、效率高的集编译、调试、开发、仿真、运行于一体的底层环境。c)中间件层:
通过对底层硬件资源和运行管理层接口进行封装,屏蔽了底层硬件、软件细节差异,为系统应用层和运行管理层提供统一的接口。d)软件框架层:
软件框架基于标准规范实现软硬件管理接口服务,通过中间件实现硬件的配置、管理、互联及通信,实现功能、算法软件组件动态配置、管理,支持用户开发独立于硬件的算法应用组件。e)应用层:
包括基于平台标准和规范开发的通用组件和专用组件。其中,覆盖各领域、各专业的通用组件为所有应用提供基础的应用服务,如CFAR(恒虚警率,Constant False-Alarm Rate)、跟踪滤波等;专用组件面向具体雷达产品,定制开发的组件,如信号处理、数据处理、协同调度等。3.2 软件组件
软件组件是面向航天测控雷达系统应用、颗粒度均衡、可重用、具有标准化接口、封装良好的软件实体,组件间的交互关系清晰明确,通过组件间的互联能够集成雷达软件系统。
软件组件基于平台标准和规范开发,通用组件用于通用算法开发,专用组件用于系统功能实现,实现算法与系统应用的隔离。通过组件间的交互或集成实现雷达系统软件开发,实现雷达系统的所有功能。只要基于平台标准和规范开发,新的软件组件开发后,利用软件框架的管理层可以将其嵌入雷达系统软件中,达到系统开放性目标。通过软件框架的软件部署服务和重构配置服务,实现各功能组件动态重构,从而实现雷达系统的多功能。
为保证软件组件间的独立性、可移植性,必须避免紧耦合情况;组件运行参数可采用配置文件系统,通过专门的参数(频率、带宽、波形、扫描模式、工作模式等)配置文件,使得软件组件易于移植到不同的型号的雷达系统中去,且使得用户执行任务更加便捷;通过系统软件总线的软件部署服务和重构配置服务,可实现各功能组件动态重构,从而易于实现雷达系统的多功能和开放性。
与精密跟踪与成像测量雷达相比,固态有源数字阵列相控阵雷达软件功能更全面,因此以固态有源数字阵列相控阵雷达为例来构建软件功能框架。
将航天测控雷达系统软件根据作用和功能划分为网络通讯、坐标变换、插值外推等通用软件和数据处理和分析、数据交互、综合显示、综合信息处理与控制、阵面控制、雷达控制、BIT与自动化测试、接收与频率源、伺服控制、模拟器等专用软件,如图7所示。通过通用软件组件和各类专用软件组件实现雷达分系统和整个雷达系统的功能。上述软件组件可支持“二次开发”或“模块化替代”,只要接口定义符合系统软件总线接口标准,可在应用层面实现软件的组件化二次开发。

图7 雷达软件组件组成框图
本文研究建立的航天测控雷达标准开放系统架构,可实现航天测控雷达功能软件化、处理数字化,有利于加快技术更新、缩短研制周期、降低维护费用、便于系统功能扩展,从而在航天测控雷达全寿命期内有效保持和适时提升综合效能。下一步将重点研究基于通用信息处理平台的软、硬件标准与技术规范,实现雷达后端处理标准化与通用化,使不同型号雷达均采用通用的技术规范,并满足航天测控雷达间功能单元可互换,最终达到优化保障、精简型谱的目的。
猜你喜欢
中国信息化(2022年4期)2022-05-06
计算机与网络(2021年8期)2021-06-20
电子乐园·中旬刊(2021年6期)2021-05-16
发明与创新·中学生(2021年4期)2021-04-20
艺术科技(2016年9期)2016-11-18
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
现代电子技术(2009年6期)2009-05-31