
基于机器视觉的军用电子元器件检测方法研究
2021-12-24 12:46荆晓莹石蕊
消费电子 2021年10期
荆晓莹 石蕊
机器视觉作为人工智能的重要分支,实现了用计算机图像处理代替人眼检测,具有感知速度快、精度高、无接触等卓越、突出的优秀特点。应用机器视觉对产品生产过程进行检测已经成为工业生产和品质控制的常用技术。军用电子元器件的检测工作中,由于元器件结构尺寸小,瑕疵点隐蔽,对检测人员的技能水平要求高,且存在着因劳动强度大而产生的视疲劳、精神松懈等人为因素的影响,导致检测工作存在疏漏隐患。为了从根源上杜绝这种人为疏漏,采用机器视觉进行自动化检测是一个理想的解决办法。基于此,本文依托已有的工业相机、图像采集设备和图像处理计算机等硬件设备,从图像处理的软件研发角度研究元器件检测方法问题。
基于机器视觉的军用电子元器件检测方法侧重于对采集到的元器件图像进行自动处理,发现其中的故障点。具体方法为:提取电子元器件图像文件,检测其中的电子元器件图像阴影;通过粒子群算法优化图像;基于CIPSO算法进行图像配准配准,发现采集图像与先验图像的差异,实现对军用电子元器件的检测。
(一)电子元器件阴影检测算法研究
提取电子元器件图像,检测其中的图像阴影,尽可能减少或消除军用电子元器件现有阴影的影响,为了还原物体的真实颜色以提高图像的质量和可见度,这个过程称为阴影去除。着色是图像重建的问题之一。阴影区域中像素的亮度和颜色会回到阴影出现前的状态,这样所有的图像在视觉上就会具有相同的亮度。理论和实践表明,要完全去除图像的阴影,使图像恢复到有阴影的状态是不可能的。需要尽可能多地利用阴影区域和阴影区域信息来改善现实中的阴影距离信息,从而对人眼所能看到的两者进行比较。创建一个简单的照明模型。假设入射光与光平行,光照亮物体并再次反射,光的方向设置为两个变量,并假设这两个变量在整个过程中是稳定的。
发现阴影在图像中的位置和范围。一般来说,它涉及到阴影,首先必须对图像中的阴影区域进行正确的检测,这是保证对阴影进行下一步处理的前提。
(二)电子元器件图像CIPSO配准设计
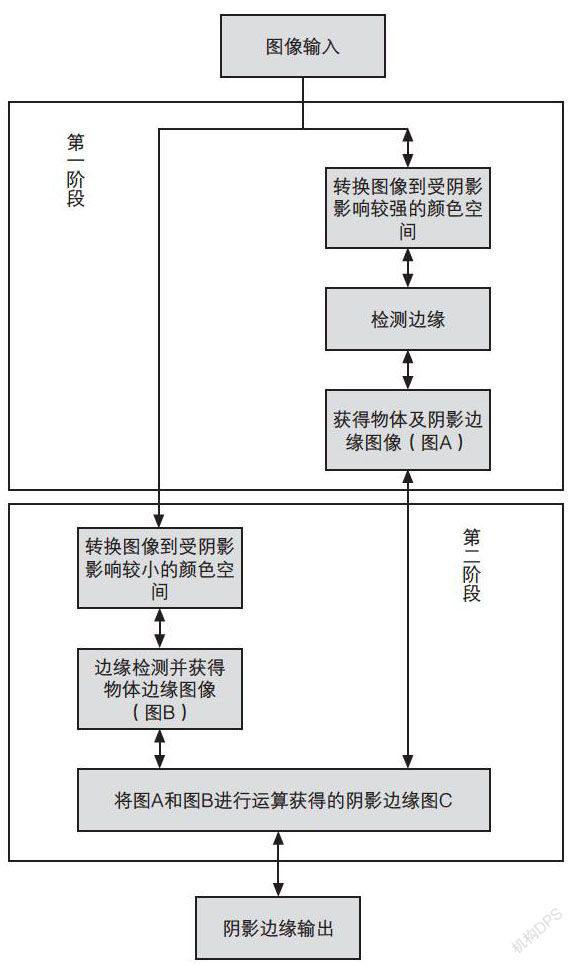
图1 基于颜色特征不变性的阴影检测算法
正确提取图像阴影后,使用粒子群优化算法发现差异点,也就是疑似故障点。为了对算法的可行性进行验证,在树立与机器视觉的军用电子元器件计算方法的基础上,将CIPSO算法应用于图像配准。
首先,准确找出算法的索引区域,也就是浮动点在图像的X和Y方向的平移量,浮动图像围绕着中心0点移动变换的角度区域。接下来初始化参数数据。
其次,根据上一步产生的随机粒子的信息,给出领域的状态知识和正常知识的初始值。根据公式计算每个粒子的适合度值,并通过Accept函数更新空间。使用效果选择更新组空间以创建新一代组。判断算法是否满足终止条件。如果满足终止条件,则搜索结束;否则,跟着上一步并继续计算,直到完成对图像全部区域的运算,完成军用电子元器件的检测。
(一)测试准备
为了验证设计的机器视觉图像处理检测方法的实效性和先进性,采用对比试验的方式进行测试。测试方法为从不同角度生成对同一个电子元器件影像的一组实验。影像不管在横轴和竖轴上,或是旋转一定量的角度,显示都会有较大的不同和差距。调一下变动的范围,其变动如下:横轴范围为[-45,+45]厘米,竖轴范围为[-30,+30]厘米,角度变动为[-20,+45]。实验中预设磨损痕迹作为测试用例。第一组的配准精细度为0.05,第二组配准精细度为0.01。以机器视觉算法中常用的IPSO方法以及本文设计方法分别进行测试,比较其测试准确度。共进行三组测试。
(二)测试结果分析
经测试,并采取均方根法剔除误差影响,测试结果见表1。

分析表1数据,本文设计方法的视觉识别数据更接近于真实情况,表明比IPSO方法更能够准确识别图像中的差异点,实现对军用电子元器件的准确检测。
机器视觉技术的研究与应用不仅解决了军用电子元器件生产效率低的问题,而且具有安全可靠、視野广、零部件选择广泛等优点。海洋导航系统机械工程技术的快速发展,是基于国内外机器视觉领域,各个研究机器视觉的专家学者所得研究成果,把已有的理论与实验相结合,研究了用于不规则产品检测的图像处理算法。虽然基于机器视觉的军用电子元器件检测方法的研究已经在实际应用中取得了成功,但仍需要不断的进步和完善,才能跟上时代的步伐。
猜你喜欢
军民两用技术与产品(2022年7期)2022-08-06
军事文摘(2020年14期)2020-12-17
中国诗歌(2019年6期)2019-11-15
下一代英才(酷炫少年)(2018年4期)2018-04-28
中国军转民(2017年11期)2018-01-31
计算机测量与控制(2017年6期)2017-07-01
中国老区建设(2016年4期)2017-01-15
小天使·一年级语数英综合(2015年10期)2015-10-14
橡胶工业(2015年7期)2015-08-29
