
基于并行1DCNN的滚动轴承故障诊断研究*
2021-12-24 08:15单雪垠李双喜张志华姚思雨
机电工程 2021年12期
刘 伟,单雪垠,李双喜*,张志华,姚思雨
(1.北京化工大学 机电工程学院,北京 100029;2.石河子大学 机械电气工程学院,新疆 石河子 832003)
0 引 言
滚动轴承是现代机械设备,尤其是旋转机械中常用的零部件,其通常工作在高温、高压和高速旋转的恶劣环境中,所以极易发生故障。据有关部门的统计,在工业领域,由滚动轴承失效引起的机械设备故障占比达41%[1]。
采用故障诊断技术,不仅可以对机械设备的运行状态进行实时监测,还可以对故障的部位和损伤程度进行识别,提高机械设备的可靠性和稳定性。因此,开发以滚动轴承为研究对象的故障诊断技术,对于提高整个机械系统的安全性意义重大。
随着现代机械设备逐渐向复杂化和智能化方向发展,针对滚动轴承运行状态的监测也进入了“大数据”时代。为了取得较好的诊断效果,传统的故障诊断技术需要复杂的信号处理方法和专业的背景知识。而面对“大数据”时代海量的数据,这个过程通常需要大量的人力,这在一定程度上制约了传统技术的应用前景。
近年来,随着人工智能技术的迅猛发展,基于深度学习理论的故障诊断技术得到了广泛应用。该技术尤其适用于解决复杂场景中的轴承故障诊断问题[2,3]。在此背景下,许多学者已经开展了大量的研究工作。
韩涛等人[4]首先对滚动轴承振动信号进行了多小波变换(multi-wavelet transform,MWT)处理,得到了相应的多小波系数分支,在此基础上构造了特征图,建立了卷积神经网络(CNN)分类器模型,实现了对滚动轴承复合故障的智能诊断。吴春志等人[5]提出了一种基于一维CNN的齿轮箱故障诊断模型,可以直接从原始振动信号中学习特征,并完成了对齿轮箱故障的诊断。张向阳等人[6]针对滚动轴承故障激励下的机匣微弱故障特征,使用连续小波尺度谱法将一维原始信号转化为二维图像信号,并将其输入CNN网络中,对滚动轴承故障进行了识别。王海龙等人[7]结合了经验模态分解(empirical mode decomposition,EMD)与CNN方法,将滚轴承信号经EMD处理得到的模态分量,与原始振动信号一起构建了二维特征图,再将特征图输入到CNN中,取得了较好的滚动轴承诊断结果。针对滚动轴承振动信号存在噪声干扰等问题,董绍江等人[8]提出了一种抗噪多核卷积神经网络,并在网络中添加了dropout层,提高了模型的抗干扰能力。刘红军等人[9]通过格拉姆角差场,将一维时序振动信号转化为二维图像,提取出了其图像特征,并将其输入到改进的CNN模型中,再通过Adam小批量优化法对其进行了迭代训练,最后取得了理想的故障检测精度。
传统的基于CNN的轴承故障诊断技术主要使用振动信号的时域信息或者频域信息,但是都没有将二者有效地结合起来,并加以更好地利用。
基于上述原因,笔者提出一种基于并行1DCNN(一维卷积神经网络)的滚动轴承故障诊断方法。首先对滚动轴承振动信号进行处理,然后构建由两个通道组成的并行1DCNN模型,一个通道学习振动信号时域信息,另一个通道学习振动信号频域信息,由此加快信号处理速度,并减少运算量,以有效提高轴承信号中故障特征信息的利用率,增强模型的故障识别精度。
1 方法原理
1.1 卷积神经网络
卷积神经网络(CNN)是一种多层次的结构模型,由输入层、卷积层、池化层、全连接层和输出层组成[10]。
(1)输入层。作为CNN的第一层,输入层用来接收训练和预测的样本,并对输入样本的大小和格式等进行校验。
(2)卷积层。卷积层是CNN的核心[11],通过卷积运算可以有效提取输入图像数据的特征信息。
卷积层的具体运算如下:
(1)

需要说明的是,从卷积层的输入到输出是线性映射,无法逼近复杂函数。为了使卷积层具有非线性输出能力,通常引入激活函数,其作用是对卷积层的输出进行非线性映射,一般采用修正线性单元(rectified linear unit,ReLu)作为一维CNN的激活函数。
(3)池化层。池化层的作用是对网络进行下采样,降低数据的维度,从而减少CNN中需要训练的参数。网络参数过多不仅会降低训练速度,而且容易引起过拟合[12]。因此,通常在某些卷积层后添加池化层进行下采样。池化一般有3种策略,即均值池化、最大池化和最小池化。目前,CNN广泛使用的是后两种,即:
(2)
(3)
(4)全连接层。全连接层将前几层处理得到的二维特征进行拼接,得到一个一维特征,并和分类器配合使用,实现分类功能[13,14]。
(5)输出层。输出层包含分类器,其作用是对训练特征进行分类,并在训练时将与目标函数的误差反馈给CNN来迭代更新权重。
传统的1DCNN网络模型如图1所示。

图1 1DCNN网络模型
由于该模型仅使用了信号的时间域相关信息,为了能充分利用频域信息,笔者提出一种并行的1DCNN网络模型。
1.2 并行卷积神经网络
由于滚动轴承产生的振动信号为一维时序信号,因此,在此处笔者主要研究一维CNN。
并行1DCNN由两个通道组成,可以分别获取振动信号的时域信息和频域信息。提取时域信息时使用相对较小的卷积核,提取频域信息时使用相对较大的卷积核,其目的是保证在获取故障特征信息的同时,可以加快网络的训练速度。
与传统单通道CNN模型相比,由于并行1DCNN模型可以充分利用所提取的时域和频域特征信息,具有更加出色的故障诊断能力。
并行1DCNN的模型结构如图2所示。

图2 并行1DCNN网络模型
图2中,第一个卷积层针对时域信息和频域信息分别使用了小卷积核和大卷积核,之后都使用较小的卷积核;同时,在每个卷积层中都设置补零操作,目的是确保卷积层的输入和输出具有相同的维度,有利于保护信号的边缘信息。
在对轴承信号进行处理的过程中,小卷积核参数参照传统的1DCNN模型,大卷积核参数根据CNN感受野的相关公式确定。
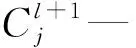
CNN的感受野示意图如图3所示。
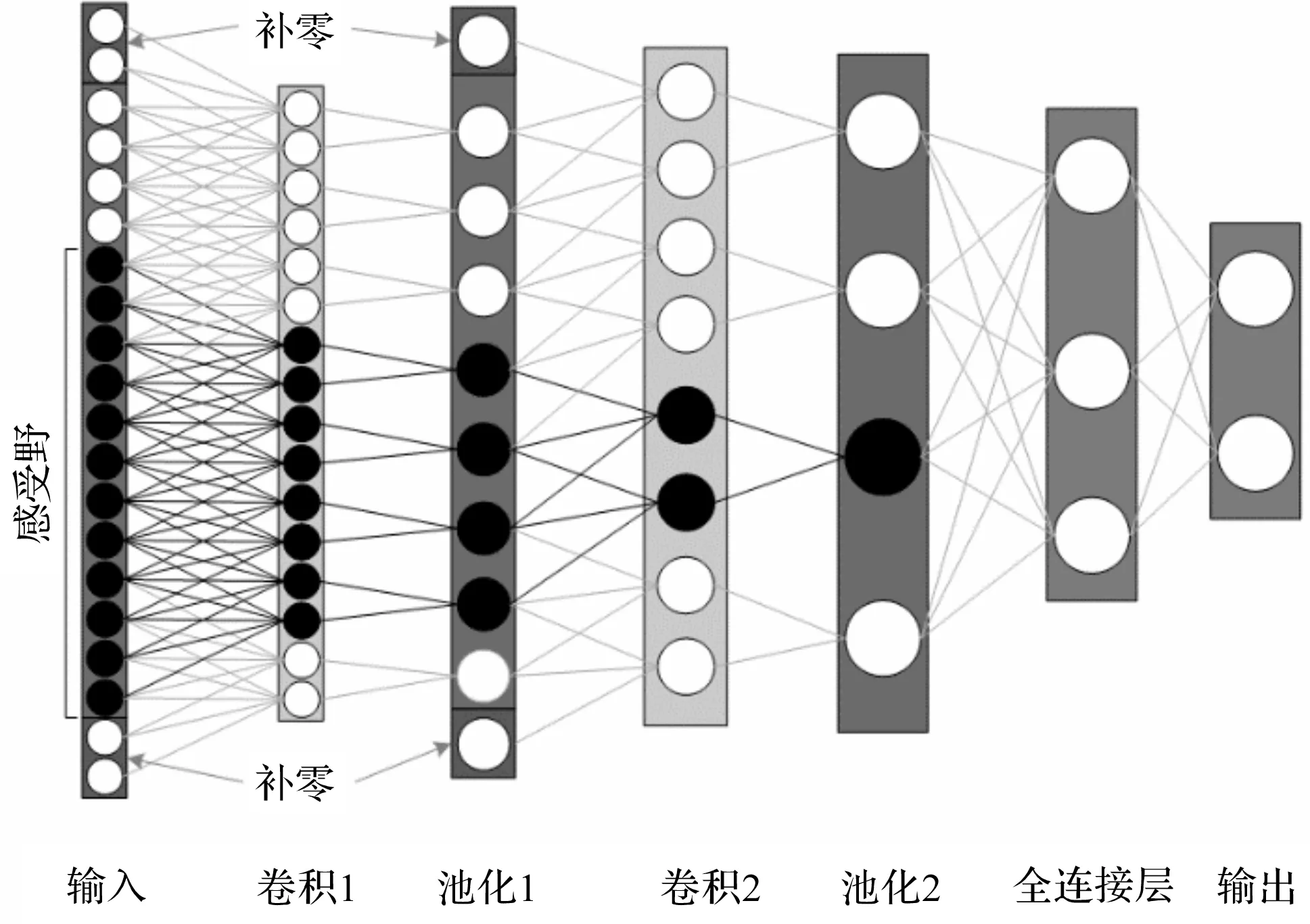
图3 感受野示意图
图3中,输入信号中的黑色神经元表示最后一个池化层的神经元在输入信号中的感受野。构建CNN的核心是确定感受野,即一个神经元在其下层网络中的感知范围[15]。由于机械振动信号具有周期性,且每一个输入信号的相位不一定相同。为了使网络学习到位移无关的特征,应确保最后一个池化层的神经元在输入信号中的感受野大小要大于一个信号周期。
设并行1DCNN中,R(0)为最后一个池化层的神经元在输入信号中的感受野,T为信号采集时一个周期的样点数,L为一维时序信号的长度,则感受野R(0)应该满足T≤R(0)≤L,其计算过程如下:
最后一个池化层的神经元在第K个池化层的感受野R(K)与在第K-1个池化层的感受野R(K-1)之间满足如下关系:
R(K-1)=S(K)(P(K)R(K)-1)+W(K)
(4)
式中:S(K)—第K个卷积层的步长;W(K)—第K个卷积核的宽度;P(K)—第K个池化层降采样点的个数。
文中,当层数K>1时,S(K)=1,W(K)=3,P(K)=2,则式(4)可简化为:
R(K-1)=2R(K)+2
(5)
当K=n时,R(n)=1,则最后一个池化层在第一个池化层的感受野为:
R(1)=2n-1×3-2
(6)
根据上述关系可以计算出最后一个池化层的神经元在输入信号上的感受野为:
R(0)=S(1)(P(1)R(1)-1)+W(1)=
2S(1)(2n-1×3-2)+W(1)-S(1)≈
S(1)(2n×3-4)
(7)
由于T≤R(0)≤L,T≤S(1)(2n×3-4)≤L,同时步长S(1)应该能够整除信号长度L。此处输入信号的长度为1 024,周期T为400,当卷积层数为5时,S(1)选定为8,卷积宽度不小于3倍步长。因此,此处第一次卷积核宽度选为24。为了同时提取滚动轴承振动信号中的时域和频域信息,并行1DCNN的另一通道使用较小的卷积核。
需要说明的是,在传统的1DCNN中通常使用全连接层。然而全连接层的缺点是训练参数较多,降低了模型的训练速度,容易导致过拟合[16,17]。为此,在并行1DCNN模型中,笔者使用全局最大池化层替换了全连接层。
另外,为了提高故障的诊断效率,笔者在并行1DCNN模型中使用了回调函数,确保当损失不再发生变化时停止训练。笔者结合了Model Checkpoint与Early Stopping回调函数,当监控目标指数在设定的轮次内不再改变,可以用EarlyStoppin终止模型训练,同时ModelCheckpoint在训练的过程中可以不断保存模型,以获得最佳模型。
2 滚动轴承故障诊断仿真
为了验证并行1DCNN模型的有效性,笔者使用美国凯斯西储大学(case western reserve university,CWRU)的轴承数据集进行仿真模拟。
CWRU实验台如图4所示。
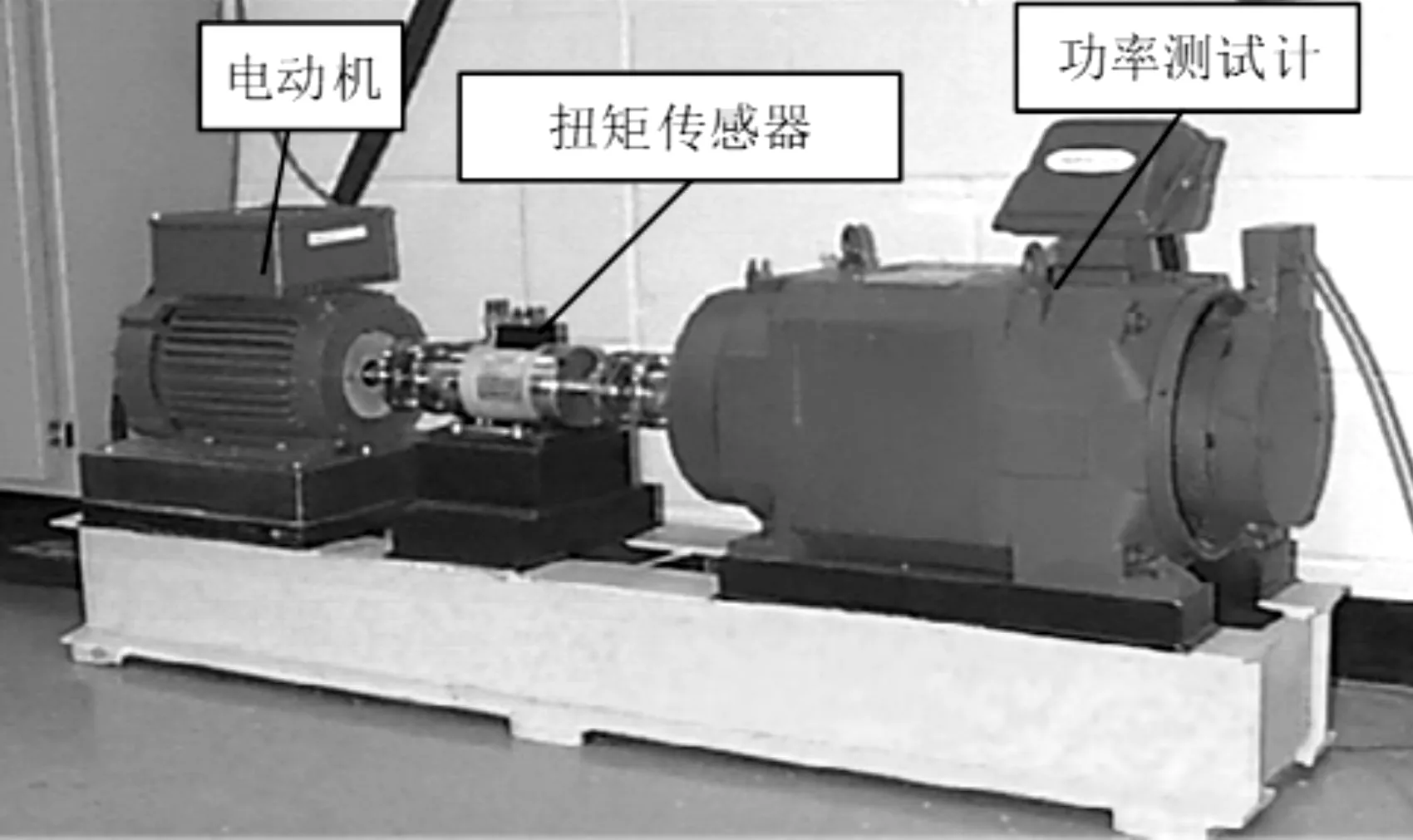
图4 CWRU实验台
在所使用的数据集中,工作台转速为1 772 r/min,一个周期内可以采集400个样点。轴承故障包括内圈、外圈和滚动体故障,每种故障对应3种不同的损伤程度,且故障尺寸分别为0.007 ft、0.014 ft、0.021 ft。
笔者分别选取3组不同损伤程度的内圈故障数据、3组不同损伤程度的外圈故障数据、3组不同损伤程度的滚动体故障数据和1组正常数据,并将上述所有数据按照56%、14%、30%的比例,划分为训练集、验证集和测试集。
数据详细使用情况如表1所示。
表1 数据集描述
为了防止因数据集样本过少,从而导致在训练过程中网络模型出现欠拟合现象[18],在实验中,笔者采用重采样方法来增加数据样本的数量[19]。
信号重采样示意图如图5所示。
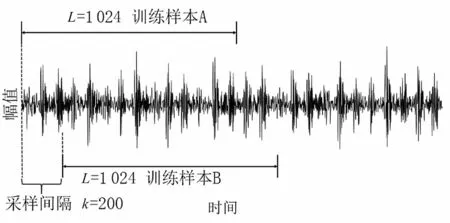
图5 信号重采样示意图
重采样是一种数据增强的方法。它通过重叠读取振动信号,来增强样本之间的相关性,使模型通过学习来增强其鲁棒性。此处选取的信号长度为1 024,采样间隔为200。
2.1 网络可视化分析
2.1.1 网络中间层可视化
中间层可视化能够展现网络模型提取轴承振动信号故障特征的过程,以便更好地理解并行1DCNN模型。笔者以内圈故障信号为例来展示并行1DCNN的中间层可视化结果。
内圈故障信号的波形图如图6所示。

图6 内圈故障信号
笔者将故障信号输入并行1DCNN模型,然后提取不同卷积层的中间输出结果,并将其做可视化处理。
轴承内圈故障信号卷积层可视化结果如图7所示。
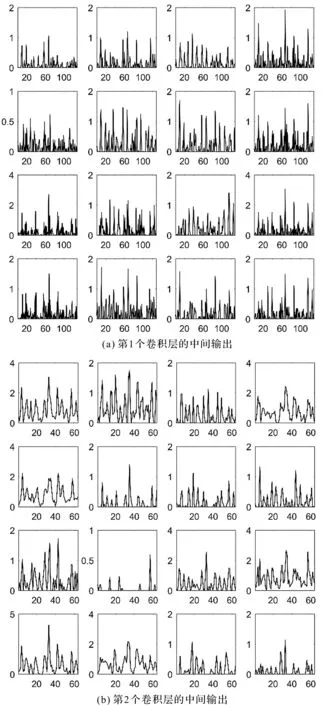

图7 内圈故障信号卷积层可视化
从图7中可以看出:当信号通过卷积层后,不同的通道可以提取不同的特征(例如,第2个卷积层的第6通道对振动信号某一区域冲击部分敏感;而第3个卷积层13通道对另一段振动信号的冲击部分敏感)。
由于不同的通道可以检测轴承不同段的冲击信号,网络模型可以通过识别信号不同区域的冲击,来学习不同故障的规律,并由此识别轴承的故障类别与故障深度。
2.1.2 t-SNE可视化
t-SNE(t-distributed stochastic neighbor embedding)是一种非线性降维技术,主要用来对高维数据进行可视化[20]。通过t-SNE降维,可以将高维数据降为二维平面散点图,通过散点图就可以直观地反映深度学习模型的故障分类情况。
并行1DCNN模型中,输入层的分类结果如图8所示。

图8 输入样本的分布
从图8中可以看出:正常数据和故障数据具有较明显的分隔;但同时不同故障类型的数据又完全叠合在一起,无法得到很好区分。
并行1DCNN模型中,输出层的分类结果如图9所示。
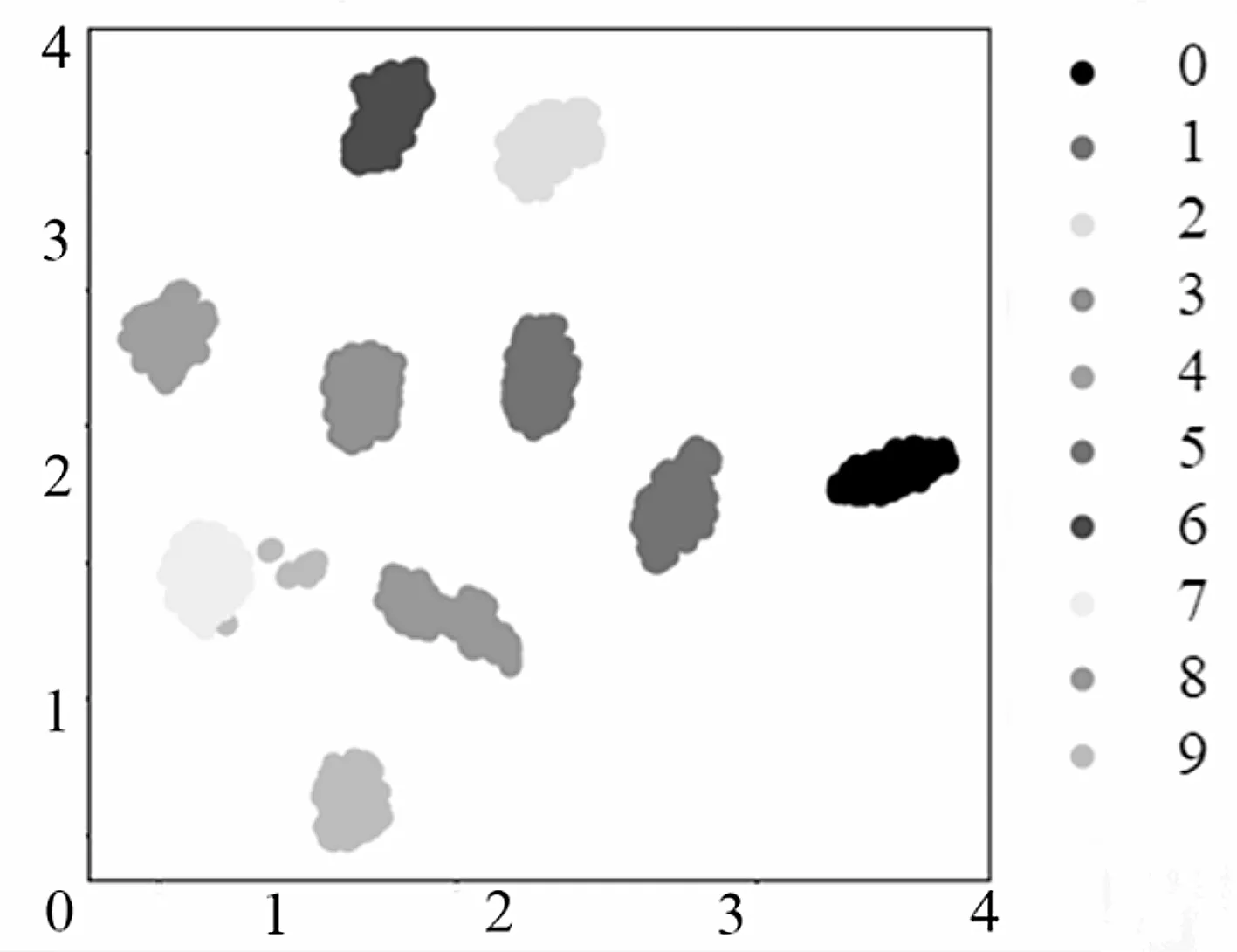
图9 并行1DCNN模型的输出
从图9中可以看出:经过并行1DCNN处理后,10种数据实现较好区分,且每种数据结构更加紧凑,只有个别类别9被错误预测为类别7;该情况说明,对于滚动体故障而言,损坏尺寸所导致的振动信号间的差异较为相似。
2.2 结果对比
并行1DCNN针对训练集和验证集的精度如图10所示(迭代次数为30次)。

图10 训练和验证精度
并行1DCNN针对训练集和验证集的损失如图11所示(迭代次数为30次)。
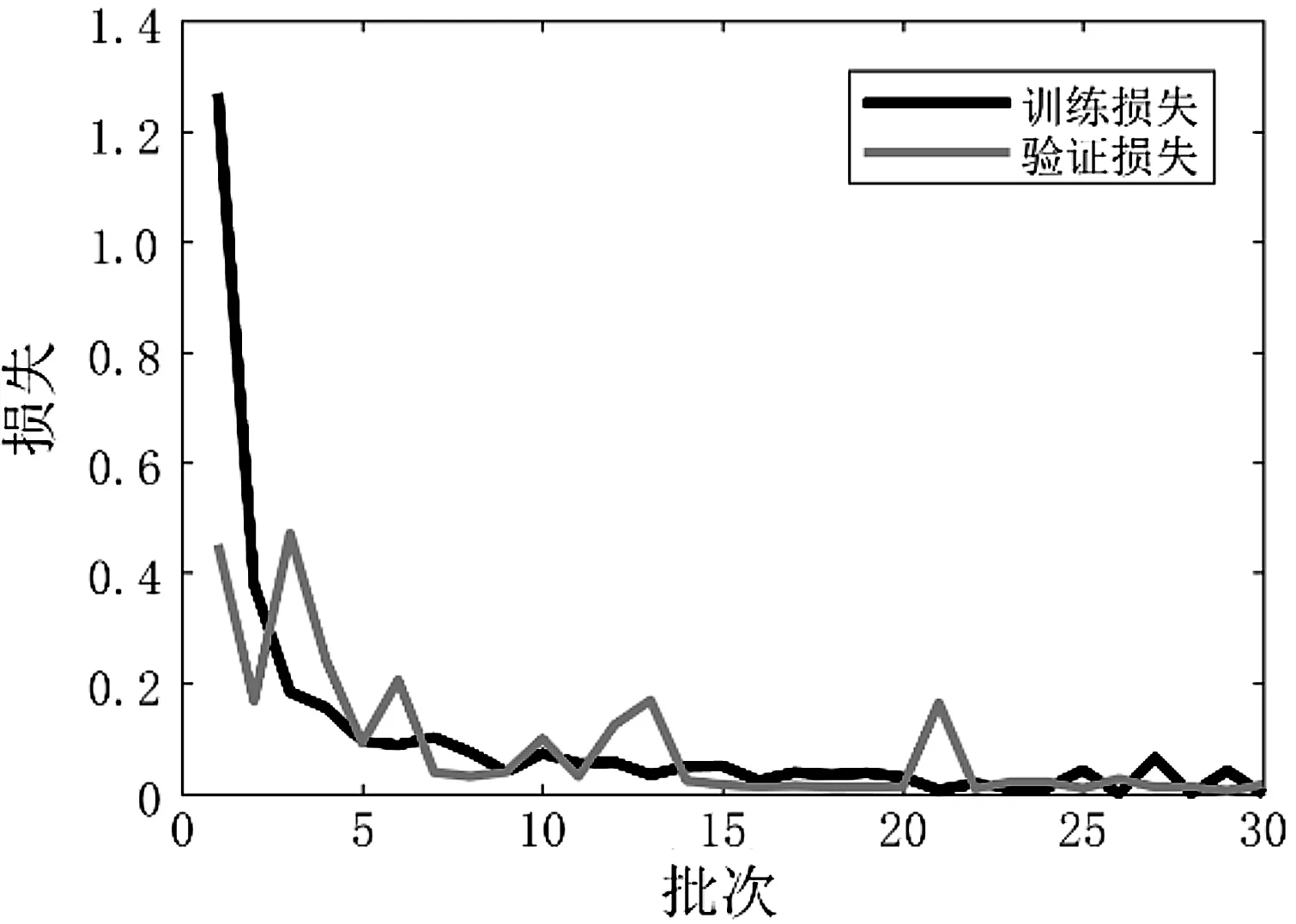
图11 训练和验证损失
在图10和图11中,黑色线条表示训练集的精度与损失,灰色线条表示验证集的精度和损失。
从图10和图11中可以看出:当批次大于15时,模型的分类精度已接近100%,同时损失值也随着批次的增加而逐渐降低。
为了避免偶然性,在实验中需要平行训练并行1DCNN模型5次,在测试集上获得故障诊断精度为0.996 9。
此外,笔者在实验中也测试了小卷积核网络和大卷积核网络的诊断精度,并将该结果与采用并行1DCNN模型获得的诊断精度进行了对比,结果如表2所示。
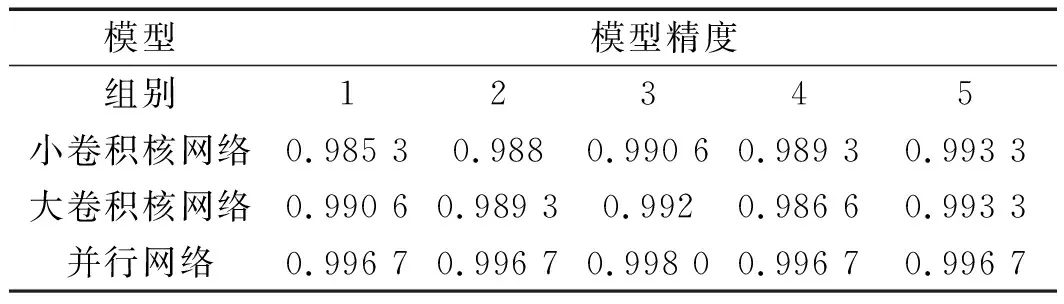
表2 平行训练模型5次得到的模型精度
从表2可以明显看出,并行1DCNN模型的故障诊断精度均高于其他2种模型的诊断精度。
针对3种网络模型的精度箱型图如图12所示。

图12 精度箱形图
由图12可知:并行1DCNN模型取得了更优的故障诊断效果,且5次运行的精度均高于0.996,最高可达0.998。
3 结束语
为了充分利用时域和频域中的故障特征信息,笔者提出了一种新的轴承故障诊断模型,即并行1DCNN(一维卷积神经网络)模型。
采用该模型对轴承故障进行诊断时,首先对滚动轴承振动信号进行处理,然后构建由两个通道组成的并行1DCNN模型,一个通道学习振动信号时域信息,另一个通道学习振动信号频域信息,由此加快了信号处理速度,提高了轴承信号中故障特征信息的利用率,增强了模型的故障识别精度。
由于1DCNN是针对传统CNN的一种改进,它具有更加出色的故障诊断能力。与其他智能诊断模型相比,并行1DCNN具有如下优势:
(1)并行1DCNN通过两个具有不同卷积核大小的通道,来学习滚动轴承振动信号的时域信息和频域信息,能够充分利用振动信号所包含的故障信息;
(2)模型的输入更加简单,直接对一维时序信号进行处理,无需将其转化为二维图像,由此加快了信号处理速度,并且减少了运算量;
(3)与传统的CNN模型相比,并行1DCNN能够有效提高轴承信号中故障特征信息的利用率,极大地提高模型的故障识别精度。
在未来的研究中,笔者将重点探索环境噪声对并行1DCNN稳定性的影响,并提出相应的解决方案。
猜你喜欢
哈尔滨轴承(2022年2期)2022-07-22
哈尔滨轴承(2022年1期)2022-05-23
一重技术(2021年5期)2022-01-18
北京航空航天大学学报(2021年9期)2021-11-02
哈尔滨轴承(2021年2期)2021-08-12
哈尔滨轴承(2021年1期)2021-07-21
电子制作(2019年11期)2019-07-04
电子制作(2018年10期)2018-08-04
北京航空航天大学学报(2018年1期)2018-04-20
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28
