
分析燃煤电站输煤廊道机器人自动巡检系统技术开发与应用
2021-12-11 17:34李旭黄晓明司朝辉
安防科技 2021年3期
李旭 黄晓明 司朝辉
摘要:为降低发电站输煤廊道内事故发生率,相关部门及人员就应主动落实巡检工作任务,传统巡检任务繁重、现场环境条件恶劣、工作人员劳动强度高,以致巡检工作质效长期未见提升。为改善以上情况,提高输煤系统运转过程稳定性、可靠性是有效方法之一,本课题研发了一款新的机器人自动巡检系统,其能替代传统人工开展巡检活动,利用三维立体化方式实现对系统状态的整体化管理,最大限度地提升输煤廊道巡检的自动化水平。
关键词:输煤廊道;巡检机器人;巡检自动化;图像识别技术
1输煤廊道机器人自动巡检优势与难点
1.1输煤廊道巡检现状
国内大部分燃煤电站现阶段习惯应用人工巡视模式,需要使用大量的人力资源,现场作业环境极为恶劣且存在着诸多不确定因素,以致巡检效果存在着较大的波动性。如果仅是简单的增设自动化监测装置,则廊道距离长、监控点位繁多等限制装置的应用过程,且会导致现场巡检工作成本明显增加。安全生产为发电厂运营的核心内容,这也是发电高度重视安全生产实现情况的主要原因。輸煤系统作为燃煤电厂内的重要设备类型,投用时可能会发生各种事故问题,特别是火灾事故的发生率更高。故而,为了使输煤系统运行安全性得到保障,运行人员一定要频繁巡视检查输煤线路工作状态,尽早发现与处理相关问题。
1.2机器人自动巡检的优势
将挂轨式智能巡检机器人用于输煤廊道现场安全巡检领域,其优点主要包括[1]:(1)主观因素不会影响机器人的现场巡检质量与效率,不管是执行大量的巡检任务还是在电缆沟道、大风暴雨等环境下运作,都能确保现场巡检工作的质效,规避漏巡、错巡等问题;(2)替代工人于恶劣环境内执行巡检任务,从根本上提升现场安全生产水平;(3)机器人内置了视频图像辨识、红外线测温、测振、跑冒滴漏动态监测等系统,明显提升巡检方法的多样性,强化了机器人巡检的效能;(4)机器人后台安置的专家系统自带图像、声音、视频录入及设备劣化趋向预测等功能,能把设备异常状态发现的时间前移,为设备状态检修工作推进提供可靠凭据,确保被监控范畴中设备在较长时间内运行状态的安稳性。
1.3难点
发电站输煤廊道自身有一定特性;(1)廊道长期在湿度大、粉尘浓度高的环境下运作;2)和综合管廊、电力隧道相比,输煤廊道的实际面积更加宽大,布置了多种设备,环境十分复杂,部分工况下还可能存在着航车或跨越桥;3)输煤距离较长,一般会通过转运站进行中转运输。整个输煤过程由煤场到锅炉煤仓之间通常会经过数个转运站。两个相邻的转运站的廊道距离大概200 m,爬坡约18°上下。一段皮带输送机由转运站被过渡至另一端输送机过程,会形成较明显的垂直落差。
2机器人自动巡检系统设计
2.1轨道传动系统
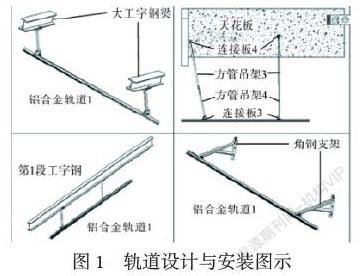
结合输煤廊道环境条件的特殊性,并综合这种廊道中构架、生产设备的布设方式及廊道实际走势,设计研发出能满足输煤廊道安全、稳定运行的巡检机器人轨道系统,立足于现场实况勾画出这种机器人的巡检路线图和轨道组装图。用高强度铝合金作为轨道型材,技术人员可以对其进行拼接处理,也可以参照廊道地形状况设计适宜的弯曲度和坡度,确保其抗腐蚀、抗磨损性均处于较高水平。组装钢质防火门且配置电控系统。在常规状态下防火门保持闭锁状态,在机器人准备穿越转运站台时,机器人自动传送出信号,防火门智能开启;在确认机器人安全稳定穿越以后,防火门自行闭合。图1是不同环境条件下输煤廊道的轨道设计及主要配件安装情况[2]。
2.2机器人平台
因为输煤廊道中潮湿且多粉,故而要求机器人外壳以及内部电气元件设备防护都要抵达IP65级。实时监控主界面是平台的主要构成,用户能利用该界面动态查询机器人系统的视频、任务计划执行情况及部分生产设备实时数据及曲线等的形成情况。平台上的子系统主要有[3]:
(1)检测系统:该系统内主要配置视频、温度、粉尘浓度等传感器。
(2)动力系统:为了满足廊道中差异化爬坡度数工况对巡检工作提出的要求,机器人平台应用了可配置化动力集成。当机器人运行在缓坡廊道或者穿越转运站时,分别应用单、双电机工作模式,后者能强化机器人爬坡能力。动力集成化确保了机器人在不同坡度廊道内行进的稳定性,节能效果优良。平台利用电池供电,配置的电池单次充电后可以达到连续行走8 h。利用电池管理系统智能监测电池电量的耗用情况。如果测得电池电量在预设值以下,机器人便会自动折返到充电位置,并传送出充电指令。
(3)定位系统:步进电机编码器是精准定位的重要基础,辅助应用射频识别技术(RFID)纠正位置偏差,定位精准度能实现10mm。安装在机器人内的信号读取器发出射频信号以后,信号范畴中的无源电子标签捕获信号并被激活,基于机器人内置天线把编码信息传送到读取器内,逻辑控制模块处理信息以后并能精准获得标签位置的信息,最后把解码所得信息完整的传动到上位机,此时就达到了对巡检机器人的精准定位。
(4)吹扫系统:机器人平台沿着轨道行进时,吹扫系统运作,利用其清除沿途轨道之上聚集的灰尘。
(5)通信系统:该系统基于无线传输形式运行。机器人和本地监控后台实现双向信息交互,被交互内容以现场检测数据与机器人自体状态数据为主。将数个无线基站安装在廊通道内,组建无线局域网,监控后台依靠无线连接进无线局域网内,确保移动监控系统中不同设备之间能互动访问,促进网络带宽负载状态实现平衡。
3输煤廊道智能巡检系统功能及应用
3.1常规功能
(1) 智能化巡检
该机器人支持全自主巡检模式的运转过程。全自主模式主要有常规、特殊巡检两种形式。在第一种形式下,机器人能依照设计好的巡检任务内容、时间、路径等智能开启并执行巡检任务。而对于特殊巡检任务,操作人员确定具体巡视点,机器人自动执行任务。利用以上功能,机器人能够反复巡检发电站设备的运转状况,并且连续、动态存储相关信息。
(2) 自主充电
机器人基本上采用如下两种充电形式,其一是非接触供电(CPS),其二是聯合应用大容量锂电池与多点接触充电系统进行供电。用户可以结合主观需求及现场实况选择适宜的供电方式,一定要确保机器人供电过程的稳定性、可靠性[4]。
(3) 多种智能化监控手段
机器人本体上组装了诸多现场监控方法,比如以3600全方位云台为基础形成的可见光视频监控以及热成像监控,确保机器人行进过程中实现对发电设备的视频巡检与红外线测温。
(4) 自检功能
机器人可以执行的自检项目较多,包括自检电源、驱动、通信装置等部件的运转状态。若其突发异常状况,则机器人便会即刻传送出报警信号,并把具体故障相关信息上传到监控后台。
(5) 数据远程通信
机器人内置的通信设备最大的作用是确保数据传输过程ed安稳性、可靠性,维持了巡检后台与机器人之间信息的互动、互通性,进而为监控后台创造良好的用户体验。
(6) 防碰撞
机器人内装设了防碰撞接触设施,以防机器人行进过程中和部分障碍物发生激烈碰撞。如果有人员或者物件和机器人的距离突破了安全距离,那么组装在显眼位置的警示灯便会不断闪动,对人员起到警示作用。
(7) 智能补光
如果输煤廊道内环境照度不够时,补光系统就会自动补光,借此方式使视频的清晰度处于较高的水平。
(8) 远程语音对讲
搭建了交互式实时对讲平台,配合应用动态降噪算法与防破音手段,即便是在高噪声环境内也能实现清晰识别。
3.2智能巡检系统的独有功能
(1) 监测有害气体和粉尘
机器人要有监测瓦斯、CO2、CO及煤粉浓度的功能,借此方式巡检人员创造健康作业环境提供可靠的数据支持,并科学推测设备异常状态。
(2) 红外热成像
在机器人巡检范围中,利用热成像去动态监测现场温度,利用后台自动分析判别设备运行状态与廊道火灾预警,智能诊断系统能及时预警异常状况。
(3) 全面监测皮带运行状态
首先,虽然在皮带运行时输送带撕边、撕裂等故障问题的发生率较高,但以上故障可能会造成十分严重的损失,推行输送带撕裂、撕边检测方案主要用于提前预警撕裂、撕边情况。机器人利用固定高速相机捕捉、识别输送带的形状改变情况,提前发出预警信号,利用图形服务器并配合用机器学习算法实现智能化比较,结合应用无线激光扫描与图像识别技术,快速识别预警皮带纵向撕裂情况,协助人工作出理性决策。高速摄像机采集频率达到30 帧/秒,需支持最高3米/秒的监测速度[5]。
其次,就地读取控制柜开关状态信息,具体是机器人的可见光摄像头自动辨识与存储廊道中控制柜上的指示灯信息;在智能辨识技术的协助下,利用适宜算法分析处理图像数据。机器人实时收集控制柜指示灯图像信息,并快速将其传送到服务器系统,智能生成设备
状态巡检报表。
再者,实现红外测温功能。机器人内部安装了红外热成像仪,其能实现对发电设备的全面扫描式测温。可以事前布置数个检测点,针对重点设备,机器人能够定时进行测温监视,并完整的采集、存储测温图片,智能生成每日测温报表。一旦检测发现某处超过预警温度值时,能快速把相应信息反馈到操作后台,通知技术人员尽早处理。
再次,具备图像辨识功能。机器人软件可以依照采集系统收集到的图像信息,实现智能化辨识对照,进而实现对皮带机现场运作状态及环境条件的整体监控,诊断判断皮带机及主要辅助装置的运行状态,并实时生成报警信号,以供运维管理人员应用。
最后,检测设备异常声音。机器人结合上传到移动平台上的声音数据进行频谱分析,判断设备运行时是否形成异响,实时报警。通常情况下,异常声响是由基频658 Hz左右的信号和相应的谐波构成。
(4) 设备振动检测
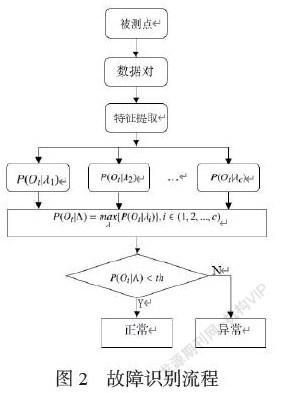
机器人系统内安装应用了振动传感器探头,能够采集、对接及存储电机、减速机等设备的振动信息,并分析设备的振动频谱,分离出和故障相关的信息,精准判断设备是否出现故障问题。振动传感器的速度测量量程达到70mm/s,速度频率10~1000Hz,加速度分辨率12㎎,采样频率达到5Ksps。故障识别流程见图2[6]。
4输煤廊道智能巡检系统关键技术
(1) 多模块分体结构
既往有大量工程实践证实,链条形构型本体的通过性较好,在隧道狭长的空间内表现出较高的适用性;模块化系统具备灵活调配资源的功能;重量实现了均衡化布置,轨道承载的负荷较小;为后续检修、管理等工作推进创造便利性。
(2) 图像识别技术
其主要作用是辨识廊道内皮带跑偏、漏煤等故障问题,并实时传送出预警信号。
(3)故障音频提取
输送机正常运行时发出的噪音与异常工况下的噪声有很大差异。利用拾音传感器获得输送机托辊运转时发出的噪声,并把噪声信息转型成频谱信息,和正常运转状态下的频谱样本做对比分析,进而精准的获得故障信息并传送出预警信号,满足输煤廊道现场安全运行的需求。拾音传感器支持采样频率100~20000Hz,最高能够抵达48kHz,在-40~80℃温度条件下能正常运作。
(4)无线测振传感器
利用这种装置测量廊道内重要设备运行过程中形成的振动数据,并利用搭载在机器人上的无线网关将数据安全的传送到监控系统内,显著提升了振动数据检测的精准度,减少资金投入。
(3) 轨道结构与机器人双驱动模式
利用这种方法增强机器人的现场爬升能力,这样在不同楼层之间实现连续化自主巡检,借此方式确保机器人在输煤廊道内实现360°无死角式巡检[7]。
(5)智能自动预警技术
后台管理系统能提供服务自主诊断功能,提供的功能有实时、接口及应用服务等,用于监测服务所在服务器的运行状态,动态监测服务器运行环境数据。并且还提供系统自诊断界面,能协助用户直接观察系统所监测设备及服务的实际运行状况,并实时上传预警信息。本系统选择历史数据作为基准,参照实时检测所得数据,利用智能预警检测算法,一旦实测值超出设计值或者实时状态大声异常时,巡检系统便智能化的把报警通知发送到后台,其中本地机器人系统能传送出蜂鸣报警,借此方式使告警信息精准度、可信度更高,减少对工作人员的依赖性。
结语
本课题内设计研发了一种适用于输煤廊道生产环境的机器人自动巡检系统,能够自动监测廊道中粉尘、温度、重要设备运转状态、异常振动等信息,并自动发出报警信号,实现对廊道现场的智能化监测,明显降低运维人员的作业强度,全面提升巡检工作效率,降低火灾等事故的发生率,维护了输煤系统运行过程的安全性、可靠性。
参考文献
[1]鲁浩,谈英姿.管廊巡检机器人控制系统设计与实现[J].自动化技术与应用,2019,78(2):6-7.
[2]肖鹿,李凯,王伟,等.露天矿山输煤廊道巡检机器人[J].露天采矿技术, 2020,35(6):5-7.
[3]赵俊杰,冯树臣,孙同敏,等.智能机器人技术在燃煤智慧电厂的功能设计与应用[J].能源科技,2020,74(4):35-42.
[4]赵泽性,赵四海,徐江野,等.立井井筒安全智能巡检机器人系统的研究[J].煤矿机械,2020,v.41;No.385(03):190-192.
[5]艾春雨,潘翔,卢玉琴.智能机器人巡检系统在变电站中的应用[J].2021,10(2016-33):214-215.
[6]陈福元,石荣华,张海龙.基于轨道式机器人的输煤皮带智能巡检监测系统分析[J].装备维修技术,2021,78(8):1-1-12.
[7]栗培国.工业机器人智能巡检系统在选煤厂的应用[J].煤炭加工与综合利用,2020,45(8):30-32.
李旭(1992年1月),性别:男,民族:汉,籍贯:江西南昌,研究方向:火电厂智能化研究与应用