
一种柑橘类水果电动采摘装置设计
2021-12-10 06:27王立刚
农业技术与装备 2021年10期
王立刚
(宜宾学院 智能制造学部,四川 宜宾 644007)
宜宾市柑橘类水果种植较多,目前主要靠人工采摘,存在安全隐患较多、采摘成本过高等问题,因此,急需一种能大大提升采摘效率、保障采摘安全、降低采摘成本的水果采摘机器。文中提出的采摘装置以电机为驱动,电机通过减速箱减速,减速后增加剪切驱动力,再由锥齿轮带动往复式刀片实现果柄剪切,在刀片下方还有接水果使用的缓冲网,可接住水果,使水果不受破坏,完成采摘。本装置结构简单、操作方便、成本低廉、适用范围广,能有效减轻果农的劳动强度。
1 总体方案设计
便携式电动水果采摘器工作流程,见图1。
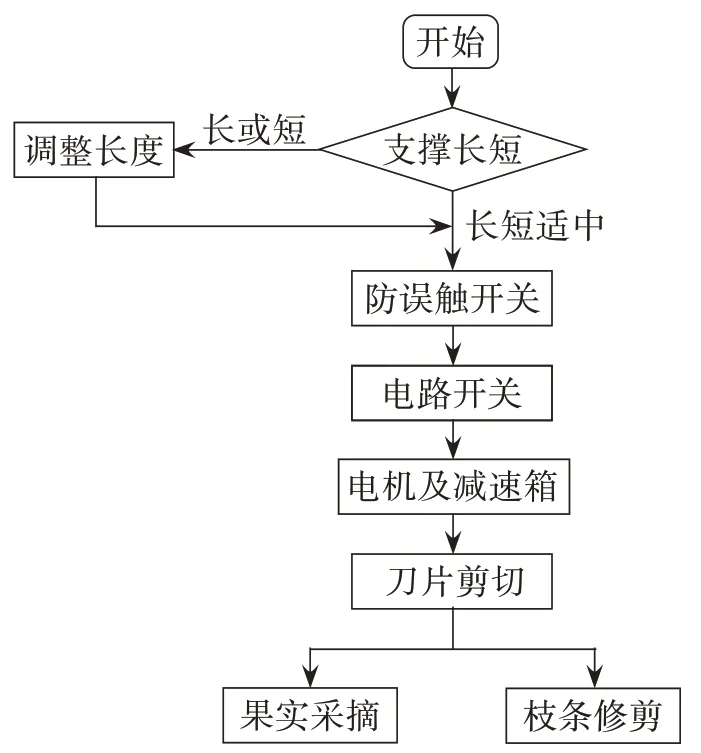
图1 系统工作流程框图Fig.1 The system work flow block diagram
2 系统硬件设计
2.1 控制电路设计
本设计采用L293D 驱动模块驱动电机,输出引脚OUT1和OUT2 控制电机两端的高低电平,实现电机正反转。当控制电机的开关按下时,电机一端高电平一端低电平促使电机正转,完成剪切工作。当关闭控制电机的开关时,之前的高低电平反向促使电机反转,回到工作前的位置,为下一次剪切任务做好准备。
2.2 果实收纳缓冲网的设计
果实收纳缓冲网接在剪切刀片正下方,在准备剪切时,刀片处于果柄处,果实正好在收纳网的网口处,当剪刀完成剪切时,果实顺势落入收纳网中。
2.3 支撑伸缩杆设计
支撑杆由2 根中空铝合金管构成,通过伸缩装置完成支撑杆的伸缩。支撑杆伸长到4 m 时能够承受3 kg 的质量,适用于绝大多数果实的采摘。伸缩转换装置是由一个弹簧卡扣组成,在中空伸缩杆上分布着均匀的小孔,卡豆可卡在任意小孔中,以此来固定支撑杆的伸缩长度。卡扣卡住支撑杆后,支撑杆便不会再任意滑动。
2.4 剪刀头的设计
剪刀头分为2部分刀片,一半刀片固定,另外一半刀片运动,中间有旋转轴,尾部为齿条,并且和减速箱输出轴的圆锥齿轮啮合,可在圆锥齿轮转动下完成旋转,完成果柄剪切和枝条修剪。该剪刀片对普通果柄可随意剪切,也可修剪直径<14 mm的枝条,空裁剪切频率为0.8 s/次。
2.5 整体外观的设计
该便携式电动水果采摘器总体呈现长型,上部分为采摘头,中间部分为伸缩支撑杆,尾部为控制开关。总体长度为1.5 m,质量为3 kg,携带十分方便,操作简单。便携式电动水果采摘器整体外观,见图2。

图2 便携式电动水果采摘器整体外观Fig.2 The overall design of portable electric fruit picker
3 系统软件设计与仿真
3.1 系统软件设计
系统软件设计流程,见图3。
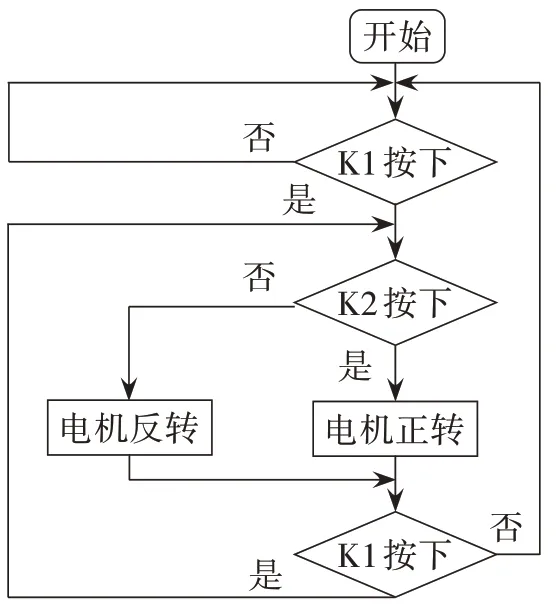
图3 程序流程图Fig.3 The program flow chart
3.2 系统仿真
首先将编写好的程序文件导入控制芯片中,开始仿真测试,此时未按下任何开关,整个电路图,见图4。
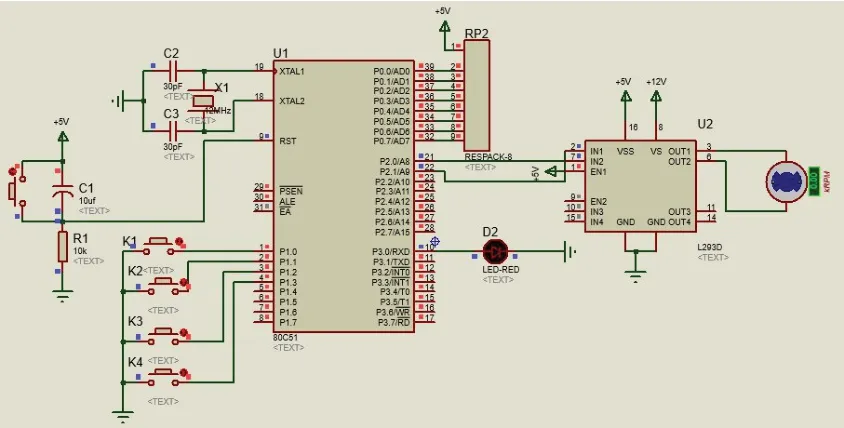
图4 电路准备状态Fig.4 The circuit preparation diagram
如果按下开关K2,电机和LED 灯都不会工作,因为总开关K1 未按下,此时电路不工作。按下K1 时LED 灯亮起,同时按下开关K2,根据程序逻辑可得此时电机正转,正转转速为1 000 r/min。同理,电机正在正转,当转过一定角度时就会触发下限位开关K3,此时电机正转到极限位置,由于下限位开关K3被触发,电机此时停止转动,转速为0。
当完成采摘任务时松开开关K2,电机正转时两端的高低电平交换,由于高低电平的交换,限位开关K3 自动弹回,电机反向转动,电机转速为1 000 kr/min。剪刀片又回到之前的位置,为下一次采摘做好准备。当电机正在反转,转过一定角度时就会触发上限位开关K4,此时电机反转到极限位置,由于上限位开关K4被触发,电机此时停止转动,转速为0。
以上5 个步骤则为电控部分一个循环,经过以上步骤之后完成一个采摘循环,即将进入下一个采摘循环。
4 创新点分析
4.1 电动化采摘
传统的水果采摘是用剪刀进行采摘,而且需要爬到树上进行作业,效率低下,成本提高并且存在安全隐患。本次设计的便携式电动水果采摘器改传统的纯人工采摘方式为机械电动化辅助采摘方式,站在地上就可以进行操作。电动化采摘方式能够大大提升采摘的效率,站在地上作业能够大大保障操作者的安全。
4.2 果实收纳
传统采摘方式不能够连续作业,采摘效率低下,缺少保护装置,容易损坏果实,从而造成损失。而新型便携式电动水果采摘器在剪刀头下方加装了一个果实收纳网,剪切断果柄之后果实顺势落入收纳网,直接装箱,可以连续作业,既保障了果实品质,又保障了采摘效率。
5 结语
在借鉴前人成果的基础上,从提升采摘效率、降低采摘成本等方面入手,对水果采摘器定位和创新。结合果农的各种需求,人可站在地上实现不同高矮的果树采摘,同时该装置还可以对果树枝条修剪。该装置大大节省劳动力,结构简单,操作方便,成本低廉,可使用性强,比较适合于中小农户。
猜你喜欢
湖南农业科学(2022年5期)2022-06-22
中国农机化学报(2022年5期)2022-05-17
中老年保健(2020年6期)2020-12-04
科学与财富(2019年7期)2019-10-21
汽车维修技师(2018年7期)2018-12-07
发明与创新·中学生(2018年1期)2018-02-02
科学与财富(2017年32期)2017-12-20
中国新闻周刊(2017年23期)2017-07-12
电子技术与软件工程(2017年10期)2017-06-02
电子技术与软件工程(2017年2期)2017-03-15
