
基于模糊PI的表贴式永磁同步电机矢量控制
2021-12-08 13:30田超岳伟陈焕明
青岛大学学报(工程技术版) 2021年4期
田超 岳伟 陈焕明
摘要: 针对传统比例积分(proportion integration,PI)永磁同步电机矢量控制存在的转速跟踪性差和鲁棒性不足等问题,本文提出一种基于模糊PI的矢量控制方法。建立了SPMSM数学模型,对转速环控制器进行设计,为便于转速环PI调节器的参数整定,给出SPMSM的运动方程,采用模糊控制调节PI参数,使系统在受到干扰和参数变化时,可以在线自整定PI参数,增强系统的稳定性和鲁棒性。同时,采用id=0的控制方法,在Matlab/Simulink环境下搭建仿真模型,将传统PI调节器系统和模糊PI调节器系统结果进行对比分析。仿真结果表明,模糊PI控制相对于传统PI控制有较强的鲁棒性、稳定性和较快的动态响应;传统PI控制的定子三相电流,在启动阶段有接近30 A的电流峰值,dq轴电流缺少较好的动态响应性能,而采用模糊PI控制系统的定子电流,在启动阶段峰值仅为传统PI控制的一半,较小的峰值可以在实际工程应用中能更好的保护电路,且dq轴电流的响应速度和准确性明显强于单独的PI控制,说明模糊PI控制系统比传统的PI控制系统具有更好的动态响应和鲁棒性。该研究将智能控制算法引入传统的电机控制当中,具有较好的发展前景。
关键词:表贴式永磁同步电机; 矢量控制; 转速环控制; 模糊PI控制
中图分类号: TM341; TP276 文献标识码: A
基金项目: 山东省高等学校科技计划项目(J18KA048)
表贴式永磁同步电机(surface type permanent magnet synchronous motor,SPMSM)具有高性能、小体积、高功率密度、结构简单、制造成本低和转动惯量小等优点[13],在汽车和家电等的驱动系统中占有重要地位。现如今SPMSM的控制方法主要分为磁场定向矢量控制技术(field orientation control,FOC)与直接转矩控制技术(direct torque control,DTC),而矢量控制技术因便于实现和改进,从而得到较为广泛的应用,针对矢量控制系统的控制算法有滑模控制[46]、PI控制[711]、内模控制[12]、模型预测控制[1316]和线性自抗扰控制[1720]等。在实际工程应用中,由于PI控制器具有低成本、易实现等优点,矢量控制多采用PI控制器控制电流环和转速环的双闭环系统,但是SPMSM是一个非线性,强耦合的多变量系统,当系统受到外界扰动影响,或电机内部参数变化时,传统的PI控制方法并不能满足实际要求。为了实现永磁同步电机的高精度稳定控制,学者们对传统的PI控制进行了优化替代。于永进等人[6]提出了将模糊控制应用在滑模控制中,在模糊控制的作用下,相对于普通滑模控制,提高了系统的调节能力和運行稳定性;谢金法等人[7]提出采用粒子群优化算法的PI控制PMSM的调速系统,其控制精度、收敛速度及系统整体鲁棒性都有一定的提高;杜涛等人[8]提出采用蜻蜓算法的分数阶PI控制对系统的转速环进行控制,而且与使用粒子群算法整定的分数阶PI控制进行仿真对比,证明了优化策略的优越性;李垣江等人[9]提出了一种应用于SPMSM转速环控制系统的复合PI控制的方法,在PI控制上增加了一个前馈环节,提高了系统对连续变化输入的响应,增加了系统的响应性能。为了克服电机的外部扰动和电机参数变化对控制系统造成的影响,本文提出将模糊控制用于PI调节器中,增强调速系统的跟踪性和稳定性。根据模糊控制原理,建立二维模糊控制器,设置输入和输出变量的论域取值和模糊规则,与PI调节器相连接,通过仿真与传统PI控制进行对比,证明了模糊PI方法的优越性。该研究在实际工程应用中能更好的保护电路,具有广阔的应用前景。
1SPMSM数学模型的建立
为了简化分析,假设SPMSM是理想模型,忽略电机铁芯饱和,不计电机中的涡流和磁滞损耗,在三相静止坐标系下,SPMSM的电压方程为
为了减少系统的控制变量,将三相静止坐标系转换为同步旋转坐标系,通常选择同步旋转坐标系dq下的数学模型用于控制器设计,其定子电压方程为
2模糊控制技术
模糊控制技术的核心思想是模糊集合,最早由美国计算机科学家Lotfi Zadeh于1965年提出,慢慢被大多数专家接受,并最终成为一种全新的人工智能原理[21]
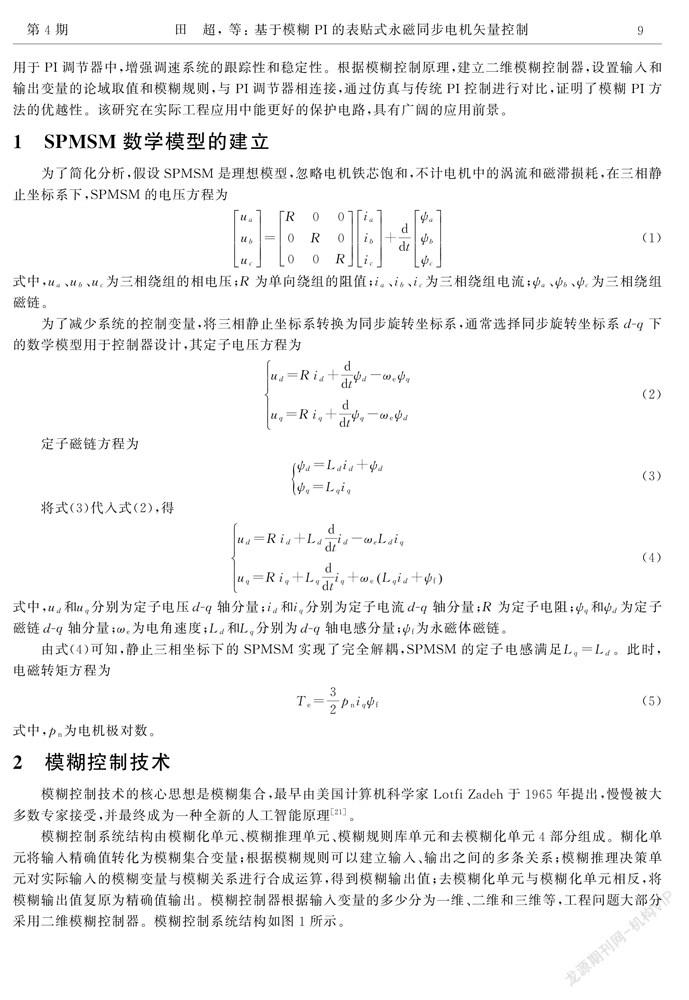
模糊控制系统结构由模糊化单元、模糊推理单元、模糊规则库单元和去模糊化单元4部分组成。糊化单元将输入精确值转化为模糊集合变量;根据模糊规则可以建立输入、输出之间的多条关系;模糊推理决策单元对实际输入的模糊变量与模糊关系进行合成运算,得到模糊输出值;去模糊化单元与模糊化单元相反,将模糊输出值复原为精确值输出。模糊控制器根据输入变量的多少分为一维、二维和三维等,工程问题大部分采用二维模糊控制器。模糊控制系统结构如图1所示。
3转速环控制器设计
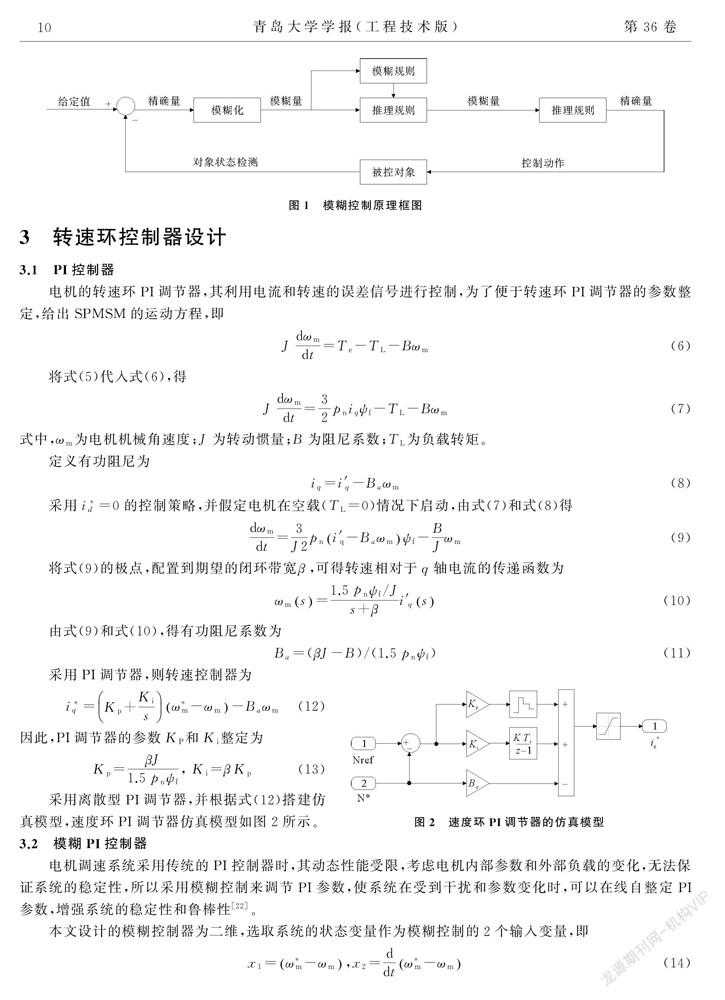
3.1PI控制器
3.2模糊PI控制器
电机调速系统采用传统的PI控制器时,其动态性能受限,考虑电机内部参数和外部负载的变化,无法保证系统的稳定性,所以采用模糊控制来调节PI参数,使系统在受到干扰和参数变化时,可以在线自整定PI参数,增强系统的稳定性和鲁棒性[22]。
本文设计的模糊控制器为二维,选取系统的状态变量作为模糊控制的2个输入变量,即
根据模糊PI控制原理框图,在Simulink中搭建仿真模型,速度环模糊PI控制仿真模型如图4所示。
4建模仿真分析
由图8a可以看出,仿真过程中,电机空载启动,由静止加速到1 000 r/min,采用传统PI调节器系统,在0.03 s时到达稳态,而且在到达稳态前有较大的超调量,在0.1 s时,系统受到5 N·m的负载,其转速出现10%左右的波动,在0.2 s时,负载增加到10 N·m,系统稳定,但是转速波动较大;采用模糊PI调节器系统,在0.025 s时达到稳态,在达到稳态前没有超调,在0.1 s和0.2 s受到突增负载时,转速波动仅为2%左右,相对于传统PI控制系统,明显有较高的鲁棒性,同时系统稳定性更强。
由图8b可以看出,采用传统PI控制和模糊PI控制的系统,启动时都有较大的扭矩,使电机快速启动,模糊PI在到达稳态前无超调,传统PI控制在到达稳态前有较小超调,在0.1 s和0.2 s施加负载,模糊PI几乎0延迟到达平衡状态,而且更加准确,有较强的动态响应能力,而传统PI在0.025 s左右到达稳态,且准确性较差。仿真结果表明,模糊PI控制与传统PI控制相比,具有较强的鲁棒性、稳定性和较快的动态响应。
模糊PI控制的电流输出如图9所示,传统PI控制的电流输出如图10所示。由图9和图10可以看出,传统PI控制的定子三相电流,在启动阶段有接近30 A的电流峰值,d-q轴电流缺少较好的动态响应性能,而采用模糊PI控制系统的定子电流,在启动阶段峰值仅为传统PI控制的一半,较小的峰值电流可以在实际工程应用中能更好的保护电路,且d-q轴电流的响应速度和准确性明显强于传统的PI控制。
5结束语
在针对SPMSM这种多变量、非线性强耦合的系统控制中,为了追求高性能控制,传统的PI控制难以满足。本文提出的模糊PI控制相对于传统PI控制具有更好的动态响应,通过仿真验证,系统达到稳态前的超调量更小,且调节时间短,鲁棒性强,不受电机参数变化的影响,适应性好,有广泛的应用前景。仿真过程中发现,因为Kp和Ki参数在控制方面的矛盾性,模糊控制对PI参数的在线整定很难做到使系统同时具有较强的转速跟踪性和鲁棒性,后续还需要对模糊控制进行分级优化或是选择新型的控制算法,使系统能更好的兼顾这两种性能。
参考文献:
[1]丁文双. 永磁同步电机PI参数自整定[D]. 南京: 南京航空航天大学, 2012.
[2]刘景林, 公超, 韩泽秀, 等. 永磁同步电机闭环控制系统数字PI参数整定[J]. 电机与控制学报, 2018, 22(4): 2632.
[3]王莉娜, 朱鸿悦, 杨宗军. 永磁同步电动机调速系统PI控制器参数整定方法[J]. 电工技术学报, 2014, 29(5): 104117.
[4]刘凌, 司杰文, 林起联. 支持向量机预测可变参数的永磁同步电机快速终端滑模控制[J]. 西安交通大学学报, 2021, 55(6): 5360.
[5]缪仲翠, 张文宾, 余现飞, 等. 基于转速估计的PMSM分数阶积分滑模控制[J]. 太阳能学报, 2021, 42(3): 2834.
[6]于永进, 朱昱豪, 周封, 等. 基于模糊滑模与新型扩张状态观测器的SPMSM无速度传感器控制[J/OL]. 电机与控制学报, [20210330]. https:∥kns. cnki. net/kcms/detail/23. 1408. tm. 20210329. 1547. 018. html
[7]谢金法, 刘涵, 李博超. 基于改进粒子群优化算法的PMSM矢量控制[J]. 现代制造工程, 2019(7): 611.
[8]杜涛, 曾国辉, 黄勃, 等. 基于蜻蜓算法分数阶PI的PMSM矢量控制优化[J]. 电子测量与仪器学报, 2020, 34(10): 132141.
[9]李垣江, 董鑫, 魏海峰, 等. 表贴式永磁同步电机转速环复合PI无位置传感器控制[J]. 电工技术学报, 2020, 35(10): 21192129.
[10]王同旭, 马鸿雁, 聂沐晗. 电梯用永磁同步电机BP神经网络PID调速控制方法的研究[J]. 电工技术学报, 2015, 30(S1): 4347.
[11]符慧, 左月飞, 刘闯, 等. 永磁同步电机转速环的一种变结构PI控制器[J]. 电工技术学报, 2015, 30(12): 237242.
[12]尹忠刚, 张迪, 蔡剑, 等. 基于三自由度内模控制的永磁同步电机矢量控制方法[J]. 电工技术学报, 2017, 32(21): 5564.
[13]葛兴来, 胡晓, 孙伟鑫, 等. 永磁同步电机三矢量优化预测磁链控制[J]. 电机与控制学报, 2021, 25(8): 917.
[14]李争, 安金峰, 肖宇, 等. 于自适应观测器的永磁同步直线电机模型预测控制系统设计[J]. 电工技术学报, 2021, 36(6): 11901200.
[15]鄢永, 黄文新. 基于闭环电流预测的永磁同步电机电流环延时补偿策略研究[J/OL]. 中国电机工程学报, 2021, 31: 110[20210325]. https:∥doi. org/10. 13334/j. 02588013. pcsee. 210021
[16]刘莹. 永磁同步電机模型预测控制策略研究[D]. 武汉: 华中科技大学, 2018.
[17]陈强, 许昌源, 孙明轩. 基于扩张状态观测器的永磁同步电机重复学习控制[J]. 控制理论与应用, 2021, 38(9): 13721380.
[18]Wang M, Wang L X, Huang R P, et al. Eventbased disturbance compensation control for discretetime SPMSM with mismatched disturbances[J]. International Journal of Systems Science, 2021, 52(4): 785804.
[19]曹正策, 楚育博. 基于自抗扰的永磁同步电机矢量控制系统[J]. 武汉大学学报: 工学版, 2020, 53(1): 6771.
[20]胡奂宜, 蔡昌新, 陈永军, 等. 基于负载前馈补偿的永磁同步电机矢量控制研究[J]. 微电机, 2021, 54(1): 8992.
[21]李曉丹. 模糊PID控制器的设计研究[D]. 天津: 天津大学, 2005.
[22]Ren H H, Zhang L Z, Su C Z, et al. Research on fuzzy control of permanent magnet synchronous motor for a mobile robot[J]. Journal of Physics: Conference Series, 2021, 1754(1): 18.
作者简介: 田超(1998),男,硕士研究生,主要研究方向为永磁同步电机无位置传感器控制。
通信作者: 陈焕明(1978),男,工学博士,讲师,硕士生导师,主要研究方向为车辆系统动力学仿真与控制及现代汽车设计方法。Email: qdchm@qdu.edu.cn
Research on Vector Control of Surface Type Permanent Magnet Synchronous Motor Based on Fuzzy PI
TIAN Chao, YUE Wei, CHEN Huanming
(College of Mechanical and Electrical Engineering, Qingdao University, Qingdao 266071, China)
Abstract: Aiming at the problems of poor speed tracking and lack of robustness of traditional proportional integration (PI) vector control for PMSM, a vector control method based on fuzzy PI is proposed in this paper. The SPMSM mathematical model was established, and the speed loop controller was designed. In order to facilitate the parameter tuning of the speed loop PI regulator, the motion equation of the SPMSM was given, and the PI parameters were adjusted by fuzzy control. When the system was disturbed or the parameters changed, the PI parameters could be selftuned online to enhance the stability and robustness of the system. At the same time, the control method of id=0 was adopted to build a simulation model in the Matlab/Simulink environment, and the results of the traditional PI regulator system and the fuzzy PI regulator system were compared and analyzed. The simulation results show that the fuzzy PI control has stronger robustness, stability and faster dynamic response than the traditional PI control. For traditional PI control of the stator three phase current, its peak is approximately 30 A startup phase current, and dq axis current lacks of better dynamic response performance. As for the fuzzy PI control system of the stator current, the peak in the startup phase is only half of that for the traditional PI control. The smaller peak can be applied to the practical engineering and it can better protect circuit. Moreover, the response speed and accuracy of dq axis current are obviously stronger than that of PI control alone, which indicates that the fuzzy PI control system has better dynamic response and robustness than the traditional PI control system. This research introduces the intelligent control algorithm into the traditional motor control and has a better development prospect.
Key words: surface type permanent magnet synchronous motor; vector control; speed ring control; fuzzy PI control
