基于迭代算法的PID控制器设计
2021-12-06 22:24何庭杰
科学与生活 2021年24期
何庭杰

摘要:针对传统的PID控制技术中参数优化难题以及就PID控制用于轨迹跟踪时存在收敛速度慢的问题, 提出了一种新的PID控制器设计方法。该方法首先构建基于输出反馈的PI控制器,然后把传统的PID参数求解问题转换为状态输出反馈K的求解,经数次迭代运算获得优化后的PID控制参数。仿真和实验结果表明, 采用该方法设计的PI-P控制器, 被控系统可以获得较高的控制精度和跟踪性能。
关键字:PID控制器;迭代算法;设计;仿真
1 PI控制器的设计
在控制输出点之后加入一个积分环节,给出基于输出反馈的PI控制器的表达式,考虑如下状态方程所描述的线性连续时不变随机系统为[1]:
由可控性判定定理可知,原系统S1-1是输出完全可控。因此,增广系统S1-3也是可控的。
2 输出反馈K的设计及指标约束控制研究
通过迭代算法,设计输出反馈K,使闭环系统S1-3既能满足单指标约束,又要满足多指标的约束。单指标约束包括极点指标、方差指标、指标;多指标约束有方差和幅值指标与衰减度指标相容、衰减度指标与指标相容。
2.1 极点指标
根据Lyapunov穩定性理论,由于闭环系统S1-3的极点配置在左半复平面的区域,必须使下式成立:
3 仿真和实验结果
为了验证该设计方法的有效性,本文以某火控随动系统的设计为例。在火控随动设计中广泛采用双环PI-P控制结构,将整个系统校正为Ⅱ型系统。Ⅱ型系统对于位置输入和速度输入都是无差随动系统,是种性能比较理想的随动系统。
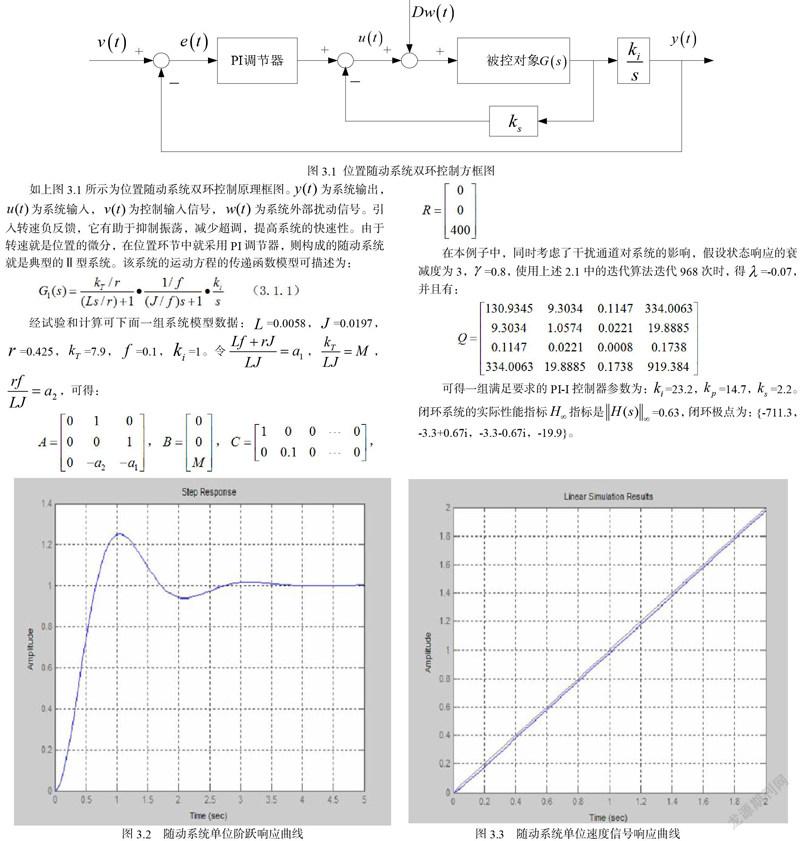
如上图3.1所示为位置随动系统双环控制原理框图。为系统输出,为系统输入,为控制输入信号,为系统外部扰动信号。引入转速负反馈,它有助于抑制振荡,减少超调,提高系统的快速性。由于转速就是位置的微分,在位置环节中就采用PI调节器,则构成的随动系统就是典型的Ⅱ型系统。该系统的运动方程的传递函数模型可描述为:
将所得的控制器参数代入如图3.1所示的系统进行MATLAB仿真试验。可得如图3.2为单位阶跃输入信号也就是位置输入时闭环系统的响应曲线,图3.3为速度为1时闭环系统的响应曲线,它表明系统的速度跟踪性能。其中虚线为给定的速度值,实线为系统实际速度输出值。结果显示该控制器的设计采用满意鲁棒控制的方法,有较高的控制精度和跟踪性能。
4 结论
PID控制器广泛应用于工业控制系统中,传统的PID调节方法过于复杂,且很难达到期望的动态响应。本文中提出了一种新的PID参数整定方法,利用基于迭代算法的LMI计算输出反馈来对系统参数进行整定。仿真和实验结果都证明了该方法的有效性,并且设计的PI-P控制系统,具有较佳的控制精度和较强的跟踪性能,完全可以应用到其它工业控制系统PID控制器的设计。
参考文献
[1]张怀相,原魁,邹伟.基于迭代学习控制的PID控制器设计[J].系统工程与电子技术,2006,28(8):1225-1228.
猜你喜欢
中国自行车(2022年3期)2022-06-30
纺织服装周刊(2022年16期)2022-05-11
物流科技(2022年2期)2022-05-07
当代化工(2020年4期)2020-08-24
网络空间安全(2019年8期)2019-03-18
科技创新导报(2017年23期)2017-10-25
小学阅读指南·低年级版(2017年1期)2017-03-13
商界评论(2014年4期)2014-06-10
计算机辅助工程(2012年5期)2012-11-21
科技传播(2012年10期)2012-06-06