GNSS结合无人船技术在水系综合治理勘测中的应用研究
2021-12-02 10:43申佳亮
科技资讯 2021年24期
摘 要:水系综合治理需要先对河道的现状进行全方位的测绘,传统的水下测量方法具有速度慢、耗费大量人力、测量误差较大等缺点。随着新兴技术的发展,无人船这种测量手段能够利用水下测量和搭载卫星定位等手段实现自动化航行并采集测绘所需的数据,其大大减少了人工量并有效地提高了测量的准确性,具有安全、快速、便捷的优点。在全球定位系统、人工智能系统等技术的支持下,无人船技术优势更加明显。
关键词:GNSS 无人船技术 水下测量 土方量计算 水系治理
中图分类号:D661 文献标识码:A文章编号:1672-3791(2021)08(c)-0052-03
Application Research of GNSS Combined with Unmanned Ship Technology in Water System Comprehensive Management Survey
SHEN Jialiang
(Fuzhou Investigation and Surveying Institute, Fuzhou, Fujian Province, 350100 China)
Abstract: Comprehensive management of water systems requires a comprehensive survey of the current status of the river. Traditional underwater measurement method has the disadvantages of slow speed, consuming a lot of manpower, large measurement error and so on. With the development of emerging technologies, the measurement method of unmanned ships can use underwater measurement and satellite positioning to realize automated navigation and collect data required for surveying and mapping. It greatly reduces the amount of labor and effectively improves the accuracy of measurement. It has the advantages of safety, speed and convenience. With the support of technologies such as global positioning systems and artificial intelligence systems, the advantages are more obvious.
Key Words: GNSS; Unmanned ship technology; Underwater measurement; Earthwork calculation; Water system management
水系既是重要的水利设施,又是生态环境的重要组成部分。开展水系综合治理是贯彻落实建设生态文明的一项重要措施,对推进社会主义新农村建设,推进当地生态环境系统建设意义重大。水系综合治理需要准确的测绘数据为工程设计做支撑。水域测量传统的作业方式是浅滩、近岸、滩涂地区直接人工RTK进行测量。传统方式很难满足新形势下水利测绘工作的要求[1]。以GNSS结合无人船技术可快速、精确地获取水下地形数据,可广泛应用于中小河流、湖泊、水库、港湾、近海区域测量或测速工作,获取水下详实的测绘数据[2-4]。传统水下主要以人工使用RTK、租船、皮划艇的方式完成项目[5]。存在着效率低、精度差的缺点。而GNSS结合无人船技术一般是将单波测深仪安装在船上,利用GNSS定位采集测量点的三维坐标的同时获取水底高程数据[6]。GNSS结合无人测量船技术优点包括轻便小巧、高精度、抗干扰强,可拓展结合多种测绘传感器,根据不同的测绘要求完成相对应的测量任务,可应用于水下地形测绘、航道清淤、安全搜救、应急测绘等领域。
1 GNSS结合无人船技术原理
1.1 无人船技术特点
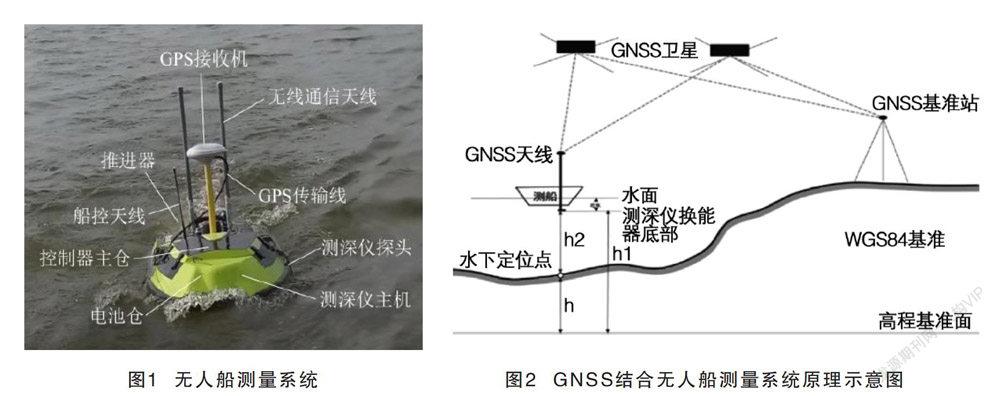
无人船是利用无人驾驶结合探测技术、通信技术、中央控制器技术等多种技术,可快速高效地获取水下信息,其特点有:(1)无人船简单轻便,在水下地形测量中具有传统测量方法难以比拟的优点,弥补了人力无法高效快速大面积获取水底高程的不足;(2)无人船测量精度高,响应速度快。无人船用这种新型的水下地形测量方式具有传统的作业方式无可比拟的优点。可高效自动地完成日常水样任务,大幅度提高作业效率、便捷性,减少人力、物力的投入。无人测量船集成GNSS、电子罗盘、避障模块等多种高精度传感设备。用户可通过无线遥控方式,规划采样任务、设置采样模式、启动中止采样任务、更加安全可靠的使用特性深受测绘单位的喜爱。事故减少、高效及运行成本低。可快速、精确地获取水下地形数据,可广泛应用在中小河流、湖泊等水域测量工作。无人船测量系统如图1所示。
1.2 GNSS结合无人船测量系统原理
GNSS结合无人船测量系统是以无人驾驶遥控船为载体结合测量系统,船体系统包含控制系统、动力推进系统、无线通信系统、卫星定位导航系统、测深系统等。其中,测量系统是整个GNSS结合无人船测量系统的核心,测量系统包含数字测深仪、姿态传感器、GPS接收机、全角度摄像头及距离传感器等多种传感设备。GNSS结合无人船测量系统基本测量原理如图2所示。整个系统的导航定位采用GPS-RTK动态差分定位原理,在岸基架设GPS基准站接收GPS卫星信号并将差分数据发送给无人铅上安置的GPS接收机,实现实时定位和导航功能。水深由安置在船上的数字双频测深仪完成,其基本原理是利用超聲波穿透介质并在不同介质表面会产生反射的现象,由换能器(探头)发射超声波汉出发射波和反射波之间的时间差来进行水深测量。
水深测量由安置在船上的单波束水深测量仪完成,其基本原理是向水底发射声波,声波到达水底后以回波的形式返回。单波束测深仪是一种利用海底反射回波进行深度测量的水声测深设备,在海洋探测领域有着广泛的应用。单波束水深测量仪可以发出声波然后利用海底反射回波,根据两个波的时间差计算水深,根据回波显示海底图形。
GNSS导航定位技术就是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度。GNSS导航设备为无人船的自动行驶和测量提供位置信息。使用GNSS-RTK测得的无人船位置信息精度能够达到厘米级,导航定位更加精准。
测量数据由无人船传输天线经网桥传输到地面工作站中,无人船工作过程中可实时通过地面工作站和遥控器进行控制。GNSS-RTK卫星定位系统和测深仪,组成一套完整的水下地形测量系统。
2 实例验证
2.1 项目概况
该项目位于某市某河流支流,水下淤泥堵塞严重,利用无人船测量水下地形并计算土方量,为后续的水系治理提供依据。测区视野开阔,通讯质量良好,无信号遮挡。测量当天外部环境适合无人船测量作业,天气晴朗,风力较小,水面相对平静。测量设备选用中海达BM1无人船,按照设计航线,进行数据的采集。
2.2 外业数据采集
作业水面长约400 m,宽400 m,航线间隔20 m,根据测线布置方案。仪器各参数设定完毕,无人船入水,航向数据采样点间距20 m,对整个测区进行数据采集。使用遥控器,控制无人船按照布置的测线跑一圈。地面工作站,实时监控无人船的测量状态,若发现异常,及时更正。经过2 h左右的作业,采集数据完毕。
2.3 数据处理
将无人船采集的河底高程点数据,首先进行数据改正,对粗差进行剔除,对测量偏移的点进行校正或删除处理,进而得到分布相对均匀的水底高程数据。将这些数据展到CASS软件中,运用三角网法计算土方量。根据前期收集的设计图纸知河底设计高程为20 m ,所以采用平场标高为 20 m 进行方量计算,得到挖方量为302 735.26 m3。
3 精度检核
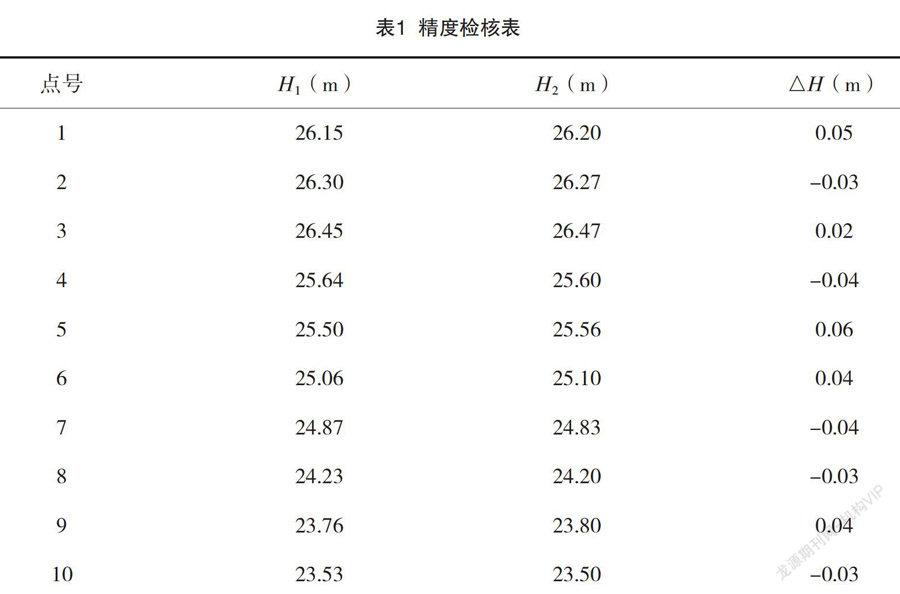
该次作业共采集了400组数据,从中提取了20个特征点,通过人工测量的方式进行数据对比,无人船所测的水深数据为H1,人工测量的水深数据为H2,检查结果如表1所示,最大误差为0.06 m,满足测量精度,效果较好。
4 结语
GNSS结合无人船技术在水下测量中具有传统人工测量方法难以比拟的优势,能够降低测绘人员直接下水测量的危险,大大节省了测绘的工作量和时间成本,提高了水下测绘的精度和可靠性。该文介绍了GNSS结合无人船技术的原理和技术方法,并进一步通过实例,表明利用GNSS结合无人船技术获取水下地形数据能够满足水下地形测量的各项要求,得到结论如下。
(1)GNSS结合无人船测绘技术在水系治理勘测中大大提高了工作效率,解决了因地形复杂造成的采集数据困难的问题,并提高了数据精度。
(2)根据GNSS结合无人船测绘技术得到的水底高程点,根据水底的实际情况选用CASS三角网法计算土石方,提高了数据的准确性。
参考文献
[1] 雷添杰,张鹏鹏,胡连兴,等.无人船遥感系统及其应用[J].测绘通报,2021(2):82-86,92.
[2] 宁新龙.浅析无人测量船在水下地形测量中的应用前景[J].水利建设与管理,2021,41(3):47-50.
[3] 普东东,欧阳永忠,马晓宇.无人船监测与测量技术进展[J].海洋测绘,2021,41(1):8-12,16.
[4] 张毅胜.水下地形测量中无人船的应用与数据处理研究[J].工程技术研究,2020,5(21):243-244.
[5] 喻江,明攀,陆俊,等.基于RTK-GPS技术船闸闸室段水下泥沙淤积测绘研究[J].工程技术研究,2020,5(18):249-250.
[6] HEIDARSSON H K, SUKHATME G S. Active Online Calibration of Multiple Sensors for Autonomous Surface Vessels[C]//Experimental Robotics.Cham:Springer,2016:229-241.
作者简介:申佳亮(1988—),男,本科,工程師,研究方向为工程测量。