基于无人机影像畸变校正方法的应用研究
2021-12-02 02:56:02吴红玲
电力勘测设计 2021年11期
赵 剑,赵 晶,吴红玲,张 栋,潘 娟
(北京洛斯达科技发展有限公司,北京 100120)
0 引言
电力通道走廊的优化设计阶段,需要根据初设路径获取对应区域的高精度航摄影像,辅助现场前期工作开展,对数据的时效性要求高[1]。因为线路长度长,通常情况下是使用载人机搭载大画幅航测仪采集测区数据,但线路经过区域不可避免经过部分禁飞区,使用载人机作业时,受审批手续繁琐、调机时间长等因素影响[2],在任务紧急的情况下,无法保证完成时间,需要一种更加灵活的数据采集手段进行补充。
无人机体积小、操作灵活,通常搭载的相机焦距短、图像传感器(complementary metal oxide semiconductor,CMOS)面积小,因此航高相对较低,受天气影响小,在飞行条件允许下能够迅速采集航摄影像[3-4]。但是由于无人机搭载的相机一般使用消费级非量测相机,相机镜头素质不稳定,物镜的畸变差相对较大[5],使得获取的影像存在一定畸变,对像点坐标产生影响,进一步影响后续空三成果的精度[6-7]。因此在使用此类型相机进行航空摄影测量作业的过程中,需要定期对相机进行标定,给予准确的相机参数[8],但随着无人机航摄作业的大范围应用,相机在转场运输途中难免会受到温度和震动的影响,导致需要重复检测,在不具备重复检测的条件下,需要寻找一种较为可靠的方法提供准确的相机参数和无畸变影像,提高空三成果精度[9]。本文主要针对不同地形、地貌类型的相同原始影像,使用不同软件进行畸变校正,对比分析不同软件校正后的数据空三计算后的精度情况,得到能够满足工程数据精度的影像畸变校正方案。
1 技术路线
Inpho软件进行处理时,对相机参数、影像质量和外方位元素的精度有一定要求,否则会出现自动匹配点失败或空三结果精度不高、相邻像对存在连接差的问题[10]。因此需要从影像数据校正开始,使用不同软件对不同区域的数据进行预处理,空三处理后添加外业控制点平差对比成果精度,主要流程如图1所示。
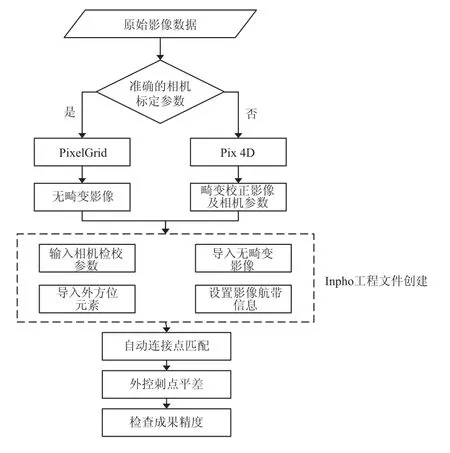
图1 不同软件畸变校正空三成果精度对比技术流程图
1.1 影像畸变校正
本文主要对比分析PixelGrid、Pix4D两款软件对于影像畸变校正的效果。两款软件的使用方式不同:PixelGrid进行影像畸变校正必须有准确的相机标定参数,从而输出无畸变影像;Pix4D可以没有准确的相机参数,通过软件自检校,输出相机参数和畸变校正影像。
分别使用两款影像畸变校正软件对采集的原始影像数据进行畸变校正,降低影像畸变差,生成无畸变影像。
1.2 影像内定向
根据相机参数、无畸变影像和外方位元素信息,恢复数据采集航带和相机姿态,自动匹配连接点,建立地面立体模型,检查自动匹配点精度,删除错点,剔除粗差,直到没有粗差完成影像相对定向。
1.3 外控刺点平差
根据采集的外业控制点坐标和现场照片,在相对定向的成果上添加外业控制点,平差后纠正整体数据的绝对精度。
1.4 空三精度对比
根据DL/T 5138—2014《电力工程数字摄影测量规程》标准要求,主要从以下几个参数判断成果精度。
1)连接点上下视察最大残差值在规范误差范围内,一般在4/3像元以内;
2)连接点上下时差中误差值在规范范围内,一般控制在2/3像元以内;
3)控制点精度在误差范围内,平面精度在0.8 m内,高程精度在0.5 m内。控制点平面中误差、高程中误差按式(1)计算。

式中:m为控制点中误差,m;Δi为控制点实测值与解算值之差;n为参与评定的控制点个数。
2 区域概况及研究方法
2.1 研究区域概况
根据地形、地貌情况,选取两处样本数据,来自于特高压工程实际采集的无人机影像数据,一处位于四川省境内,地形以山地为主,研究区内起伏较大,如图2所示;一处位于湖南省境内,以丘陵为主,测区内有少量建筑物,如图3所示。数据详细情况如表1所示。

表1 测试数据情况

图2 研究区1山地PHASE影像

图3 研究区2丘陵D850影像
2.2 研究方法
分别使用PixelGrid、Pix4D对同一区域数据进行影像畸变纠正。PixelGrid使用距离数据采集时间较近和较远的相机标定参数(较远一次标定的数据距离数据采集时间18个月,符合GB/T 27920.1—2011 《数字航空摄影规范 第1部分:框幅式数字航空摄影》规范要求),输出两套无畸变影像;Pix4D针对不同地形数据的影像进行自检校,输出相机参数和畸变校正影像。
根据不同软件和数据的特点,主要设计以下三个方面的实验:①使用山地PHASE影像,使用距离外业航飞时间较近和较远一期的相机标定参数,使用PixelGrid对原始影像进行畸变纠正,对比不同相机标定参数对空三成果质量的影响;②使用丘陵D850影像,在没有准确标定参数的情况下,使用Pix4D进行自检校,输出的成果进行空三处理,对比自检校后的精度;③对于复杂地形情况下,在地形起伏较大的地方,测试Pix4D的自检校影像空三精度。
3 结果分析与讨论
3.1 PixelGrid影像畸变纠正结果统计
分别使用2017年4月和2018年12月的相机标定参数,数据采集时间为2018年11月中旬,使用PixelGrid对原始影像进行纠正,分别使用不同相机参数校正后的影像进行空三计算、外控刺点后,中间检查控制点精度和连接差,统计结果如表2~表5所示。
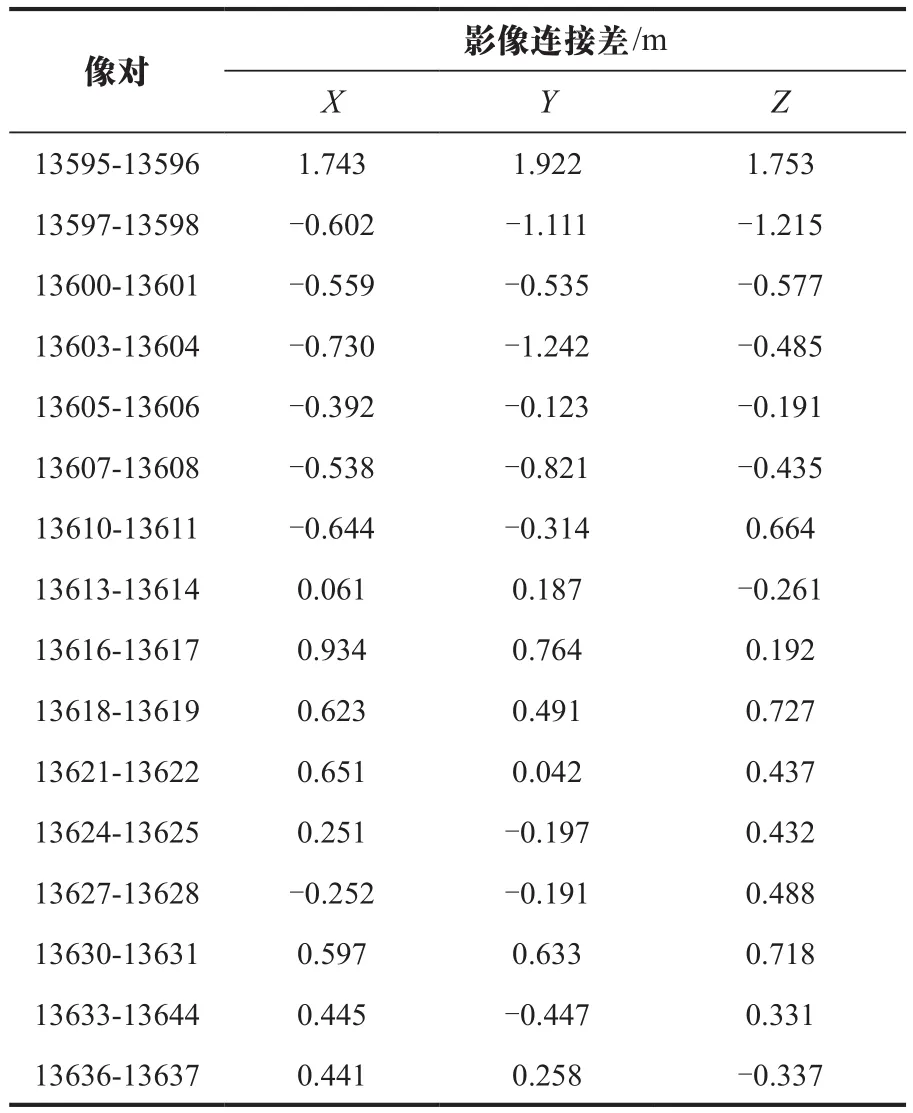
表2 2017.04相机参数校正影像连接差

表4 2017.04相机参数控制点精度
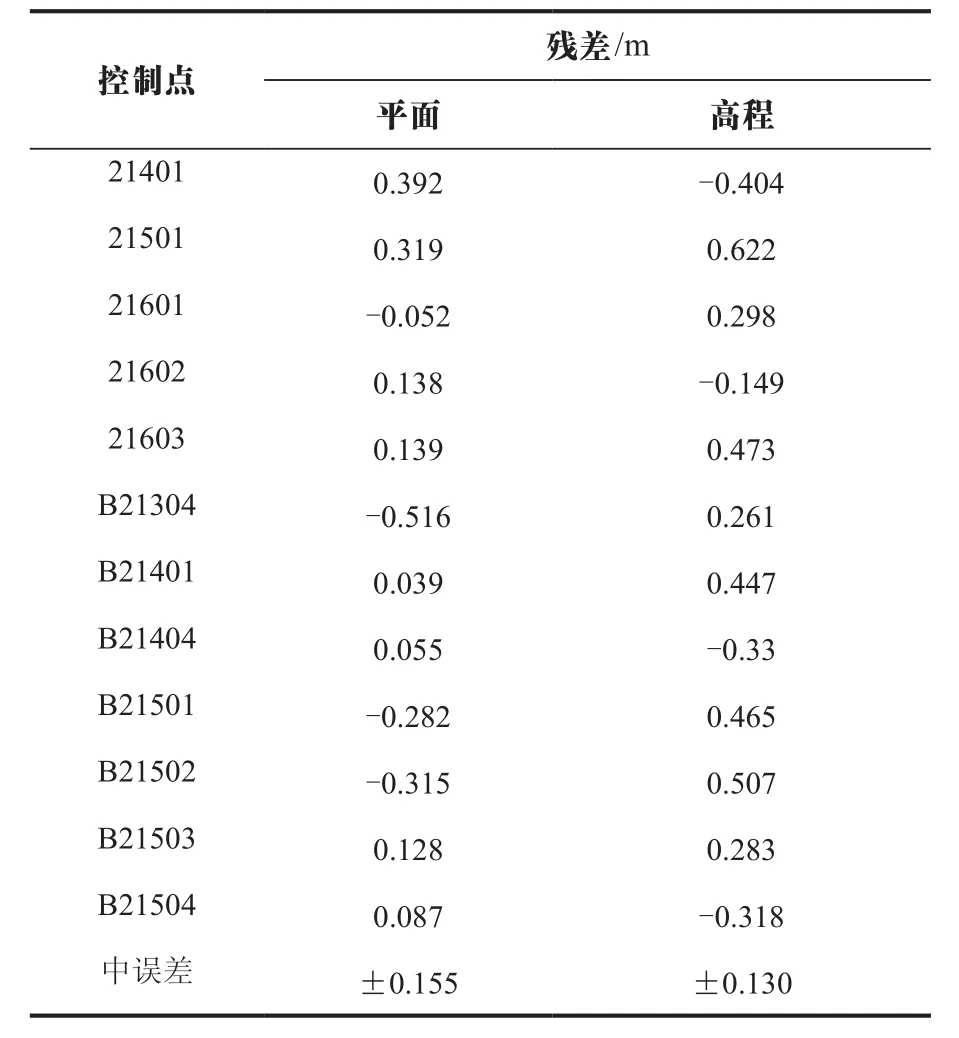
表5 2018.12相机参数控制点精度
从表5精度对比来看,2018年12月检校值校正的影像进行空三后的模型连接差和控制点精度绝大部分控制在0.5 m内,符合工程需求,明显优于2017年4月相机标定值检校的影像数据空三成果。
3.2 Pix4D自检校结果统计
当外业航飞前后没有条件对相机进行标定的情况下,可以利用Pix4D对影像数据进行自检校,生成准确的相机参数和未畸变影像,开展内业数据处理工作。在平地工程中原始影像直接使用Inpho空三计算时自动连接点匹配不通过。使用Pix4D进行影像畸变纠正,空三,外控刺点后精度统计如表6、表7所示。
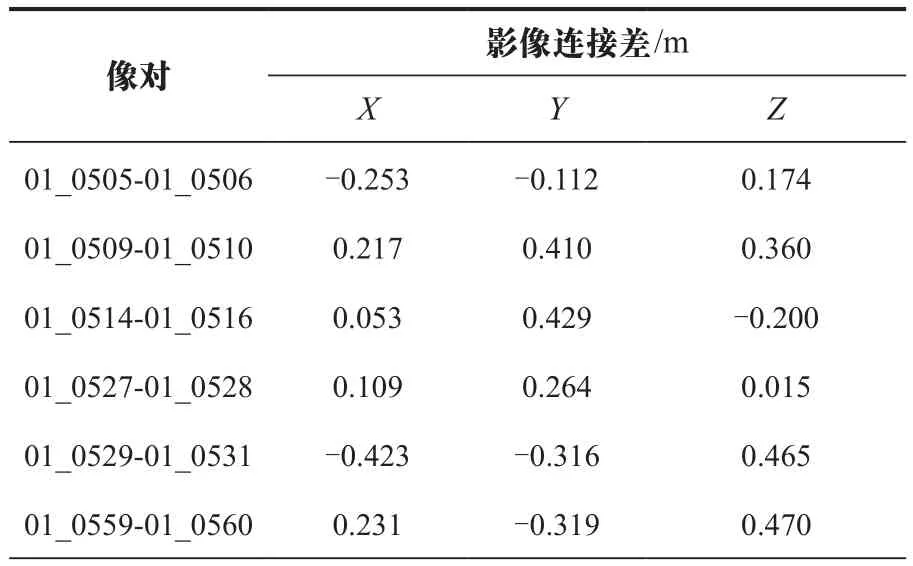
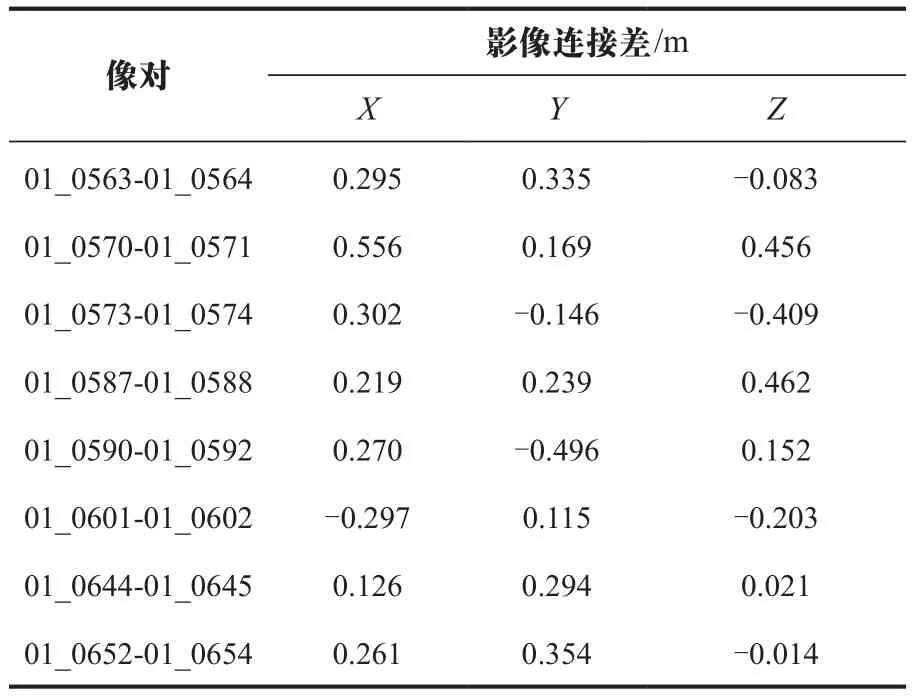
表6 模型连接差

表7 控制点精度
续表
从上表可以看出,通过Pix4D自检校过的相机参数和影像,在空三计算后,模型连接差和控制点精度有明显改善,只存在极个别点的精度超过0.5 m,有效地改善了内业数据处理精度。
3.3 特殊地形Pix4D自检校精度统计
从上面一个实验的精度统计结果来看,Pix4D在没有准确相机标定参数的情况下,自检校后的成果能够在一定程度上改善工程成果数据精度的问题,但是实际作业过程中发现,对于部分采集区域地形复杂的数据,Pix4D成果的精度并不是十分理想。以山地工程采集的数据为例,使用Pix4D自检校后的参数数据处理成果统计如表8、表9所示。
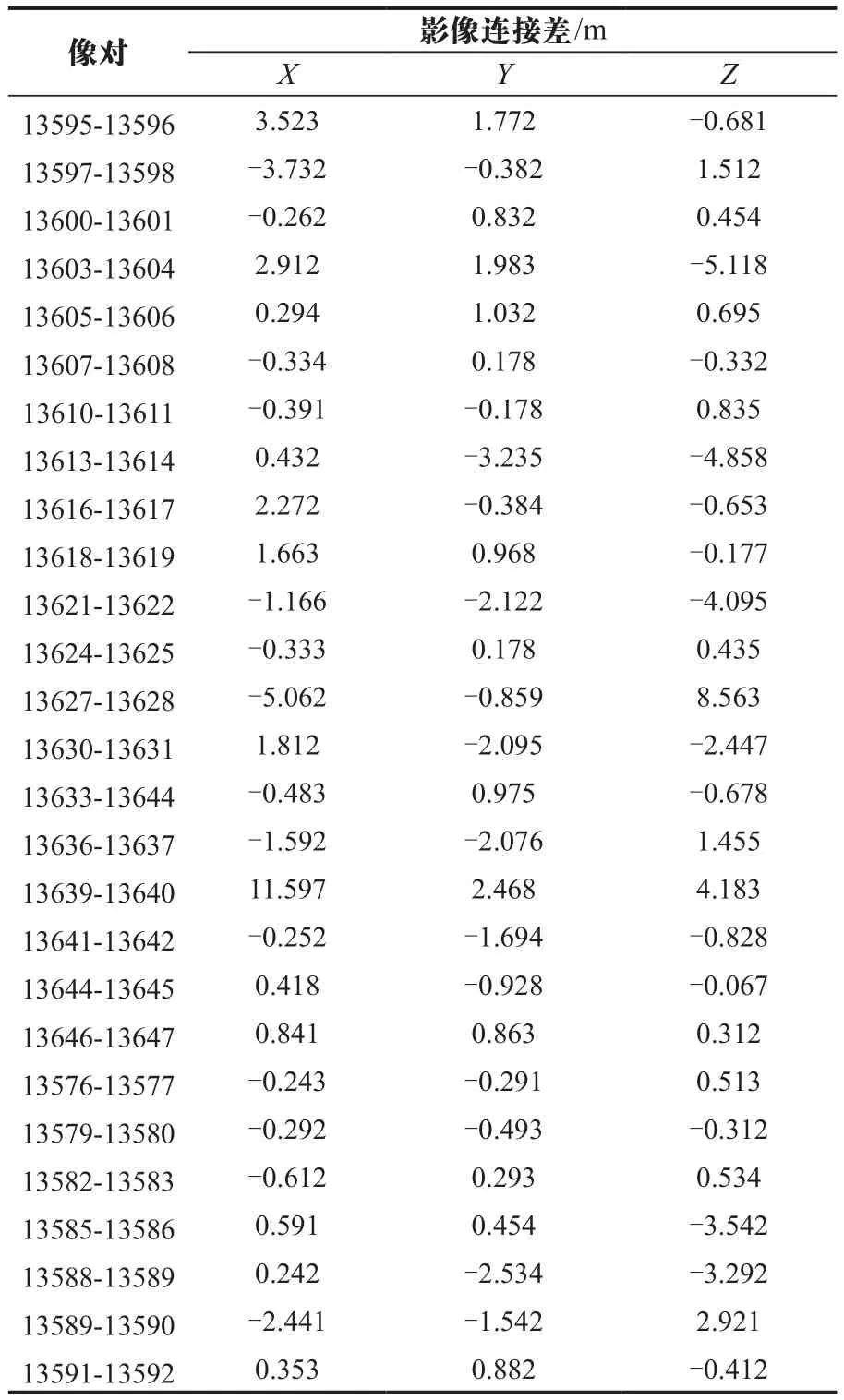
表8 模型连接差
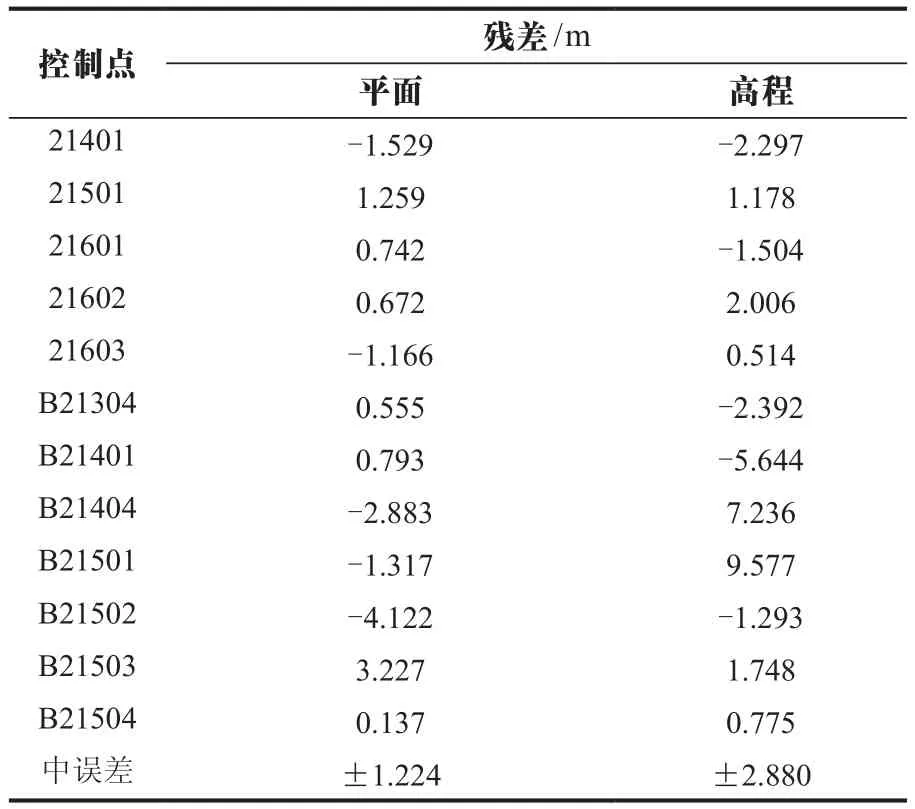
表9 控制点精度
从模型连接差和控制点精度的统计结果来看,该区域数据使用Pix4D自检校后处理的成果精度较差,还需要准确的相机标定参数对获取的影像数据进行畸变校正。
4 结论
内业数据处理的成果精度很大程度上会受到原始影像数据质量的影响,通过影响畸变校正软件可以纠正因为相机物镜或投影中心偏移引起的畸变差,提高成果精度。通过本文使用不同软件对不同区域数据的处理可以看出:
1)相机标定参数的准确度对影像畸变纠正质量和空三质量的影响较大,在进行影像畸变校正时,使用相机标定参数校正的影像效果优于自检校的影像,使用相机标定参数进行畸变校正时需要使用尽可能靠近外业采集时间的相机标定参数。
2)当作业条件不允许时,可以利用后处理软件如Pix4D等对像片进行自检校,纠正影像畸变,在一定程度上能够有效地提高成果精度,但是这种方法存在一定的局限性,在地形复杂、起伏较大的区域自检校成果精度也无法满足需求,仍需要准确的相机标定参数。
本文通过对无人机非量测相机标定后和未标定的影像预处理后进行精度分析,对后续开展无人机非量测相机的畸变差校正有一定的参考作用。在实际作业过程中,当相机长期放置、运输等可能对相机标定参数造成影响的操作后应该定期对相机进行标定,以获取较为准确的相机标定参数,校正影像,保证工程数据精度。在对于影像未进行畸变校正的工程项目中,本文提供了一种快速、可靠的方法提高成果精度,缩短了工程周期,保证了工程质量。
猜你喜欢
写真地理(2020年39期)2020-12-23 02:01:59
理论与创新(2020年15期)2020-10-09 11:07:45
辽宁省博物馆馆刊(2020年0期)2020-08-13 09:15:58
企业科技与发展(2018年5期)2018-09-10 00:20:39
北京航空航天大学学报(2017年4期)2017-11-23 05:48:22
摄影之友(影像视觉)(2017年10期)2017-11-07 02:37:15
中国工程咨询(2017年12期)2017-01-31 02:56:54
安徽地质(2016年4期)2016-02-27 06:18:21
全球定位系统(2015年4期)2015-02-28 12:38:12
癌变·畸变·突变(2014年2期)2014-03-01 04:39:41