
非确定性密闭舱室温湿度控制系统研究
2021-12-01 07:41姜陈欣高立娥张文博刘卫东
计算机测量与控制 2021年11期
姜陈欣,高立娥,张文博,李 乐,刘卫东
(西北工业大学 航海学院,西安 710072)
0 引言
随着我国深入推进建设海洋强国进程的不断加快,载人潜水器和潜水艇的发展取得了长足进步[1-3],但相比传统陆上环境,水下环境复杂,且作业条件多变,加之水下密闭舱室温度高,湿度高,陆上设备和传感器的稳定性和可信度可能会因环境改变而受到影响,为了对传感器和其他设备进行标定和校验,测试常规条件设备在特种温湿度条件下的性能,于是,较为精确地模拟潜艇舱室温湿度环境有着极其重要的理论价值和工程价值。舱室本身的热量丧失、舱室内部设备和运动体工作时对舱室温度的影响、温度变化对相对湿度的影响,水下作业人员各项生命活动造成的温湿度改变导致增加了水下密闭舱室温湿度动态控制的不确定性。国内外对于温湿度控制的研究已经较为成熟[4-6],但涉及非确定性水下密闭舱室的温湿度动态控制系统较为少见,本文针对这一问题展开研究。
模糊PID是模糊逻辑控制理论与传统PID控制的结合,在PID算法的基础上,以误差E、误差变化率Ec作为输入,利用模糊控制规则进行模糊推理,并查询模糊矩阵表进行参数的调整,以满足不同时刻的E和Ec对PID参数自整定的要求。文献[7]提出了一种数据融合和模糊解耦的控制策略,有效解决了温湿度控制系统中传感器可靠性低、温湿度耦合的问题。文献[8]将模糊自整定PID控制算法应用于3D生物打印设备,提高了系统鲁棒性,降低了达到稳态的时间,并大大降低了超调量。文献[9]将自适应模糊PID算法与前馈补偿解耦算法结合设计的控制器应用于焓差实验室,仿真结果较好,实现了温湿度的完全解耦。文献[10]提出了一种基于模糊PID参数自整定的细胞培养箱温度控制算法,在控制稳定性方面获得了比传统PID控制更好的控温效果。文献[11]提出了一种基于模型参考自适应PID的高压釜温度控制方式,通过仿真实验证明,该控制方案能够有效减少超调量,改善动态特性。
研究表明,温度变量和湿度变量具有耦合性,当绝对湿度不变时,温度每上升1 ℃,相对湿度下降约5%,而湿度对温度的影响较弱。且环境温度相较环境湿度,前者变化速度较慢。针对这一特性,对温度和湿度进行串联补偿解耦,使原本耦合的温度变量和湿度变量等效成为两个独立的温度和湿度控制子系统[12-15]。本控制方法在具体实现的过程中,先以舱室温度为主要控制对象进行控制,达到控制要求后,再对湿度进行控制。
1 温湿度控制系统总体结构
1.1 硬件设计
温湿度控制系统的硬件主要由主控设备、循环除湿机、加湿器、恒温缓冲水箱、加热制冷循环机、温湿度传感器组以及舱体和管道等组成,具体组成如图1所示。

图1 总体结构硬件框图
其中主控设备为工业控制计算机。循环除湿机和加湿器控制舱室湿度,两设备与管道鼓风机以及舱室间通过PU软管相连,并在舱室前盖门处安装风机,使舱室空气均匀分布,提高温湿度传感器信度。舱室外壁以3 cm为间隔均匀密布紫铜管,恒温水箱进出水口和加热制冷循环机进出水口与铜管相连,接口处连接电磁阀,铜管内注水,通过调节水温以热传导方式控制舱室内部温度,铜管与舱室外壁间隙间通过填充导热硅脂以增加接触面积,使舱室内部升温均匀,减少热量散耗,铜管外贴合包裹发泡橡胶以减少热量散失,外层再安装铝盖板提高舱室结构强度。密闭舱室结构如图2所示,当前舱室盖门处于开启状态,各温湿度传感器均匀布放在舱室内部以实时监测舱室内部温湿度情况,温湿度传感器兼具温度测量和湿度测量功能,其敏感探头伸入舱室内部,模拟水下温湿度环境时,盖门关闭,舱室内部设置需要标定和校验的各类仪器设备和运动体。
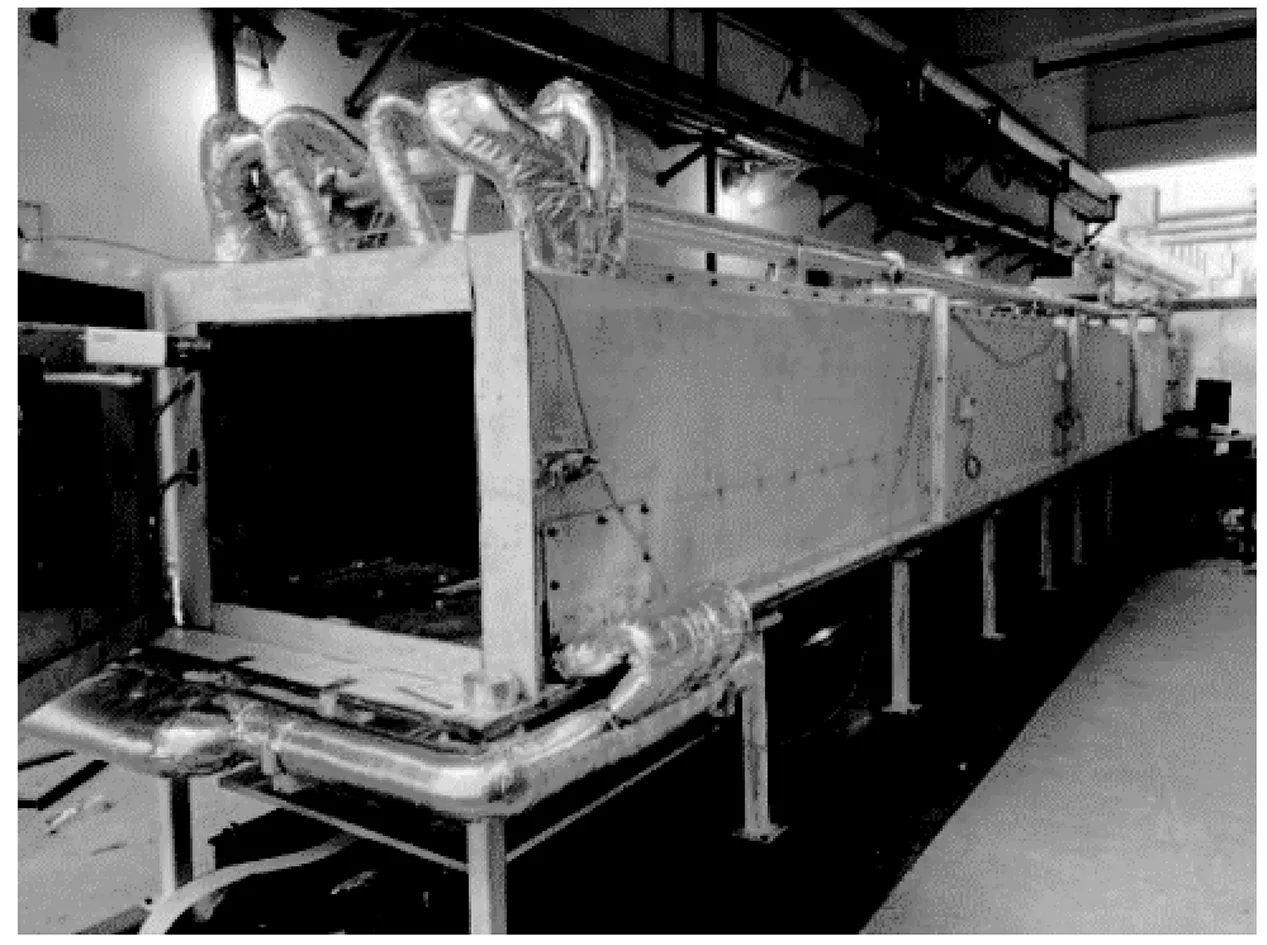
图2 密闭舱室实物图
1.2 软件功能
温湿度控制系统的软件功能主要包括系统运行状态检查、温度控制、湿度控制、人机交互界面、控制系统与主控机通信等基本功能。
1.2.1 系统运行状态检查
主要检查工业控制计算机、加湿器、循环除湿机、加热制冷循环机和恒温缓冲水箱等主要设备的运行状态,及时进行故障诊断和报警提示。
1.2.2 温度控制
温度控制部分主要根据设定温度和舱室当前温度,计算出预设温度,并通过恒温缓冲水箱执行P控制和模糊PID控制对舱室温度进行预先粗控。在舱室温度接近设定温度时,温度控制部分从恒温缓冲水箱切换为加热制冷循环机的PID控制。
1.2.3 湿度控制
主要根据设定湿度和舱室当前湿度,计算出预设湿度,并对加湿器和除湿机进行控制管理。当舱室湿度超过设定湿度时,湿度控制部分通过循环除湿机对舱室空气进行循环除湿;当舱室湿度低于设定湿度时,湿度控制部分控制加湿器对舱室空气进行加湿;当舱室湿度达到设定湿度范围时,湿度控制部分控制加湿器和循环除湿机暂停加湿或除湿工作。
1.2.4 交互界面
交互界面软件主要用于显示舱室的温湿度监测值,水管和气管电磁阀的开/断状态,加湿器、循环除湿机、加热制冷循环机和恒温水箱等主要设备的运行状态。为操作人员提供舱室温湿度的状态信息和系统运行信息,由工业控制计算机软件在后台自动进行温湿度控制和系统运行管理。
1.2.5 温湿度控制系统与主控机通信
温湿度控制系统与主控机采用以太网进行通信,温湿度控制系统主要接收主控机的温度、湿度设定值,并实时地将检测到的舱体温湿度数据上传到主控系统,以便主控系统及时了解温湿度控制系统的运行状态。
软件功能结构图如图3所示。

图3 软件功能结构图
温湿度控制系统的主控操作界面如图4所示。界面上方为各温度传感器和湿度传感器采集数据的实时显示。中部为舱体和管道的物理位置布放示意。下方左部为温度控制子系统界面,其中包括温度预定总设置,当前舱室温度显示以及恒温缓冲水箱和加热制冷循环机的单独控制部分,下方右部为湿度控制系统,包括湿度预定总设置,当前舱室湿度显示以及除湿机和加湿器的单独控制部分。

图4 软件操作界面
2 温度控制系统
2.1 模糊PID算法
经典PID控制方法原理简单,可靠性强,广泛运用于现代工业控制领域,但其缺点也十分明显,即控制对象参数稍作改变,经典PID控制无法实时调整PID参数,而模糊PID控制很好的克服了这一问题,其主要方法是利用模糊逻辑并且根据一定的模糊规则对PID参数进行实时优化[16-18]。本文研究的模糊控制结构图如图5所示。
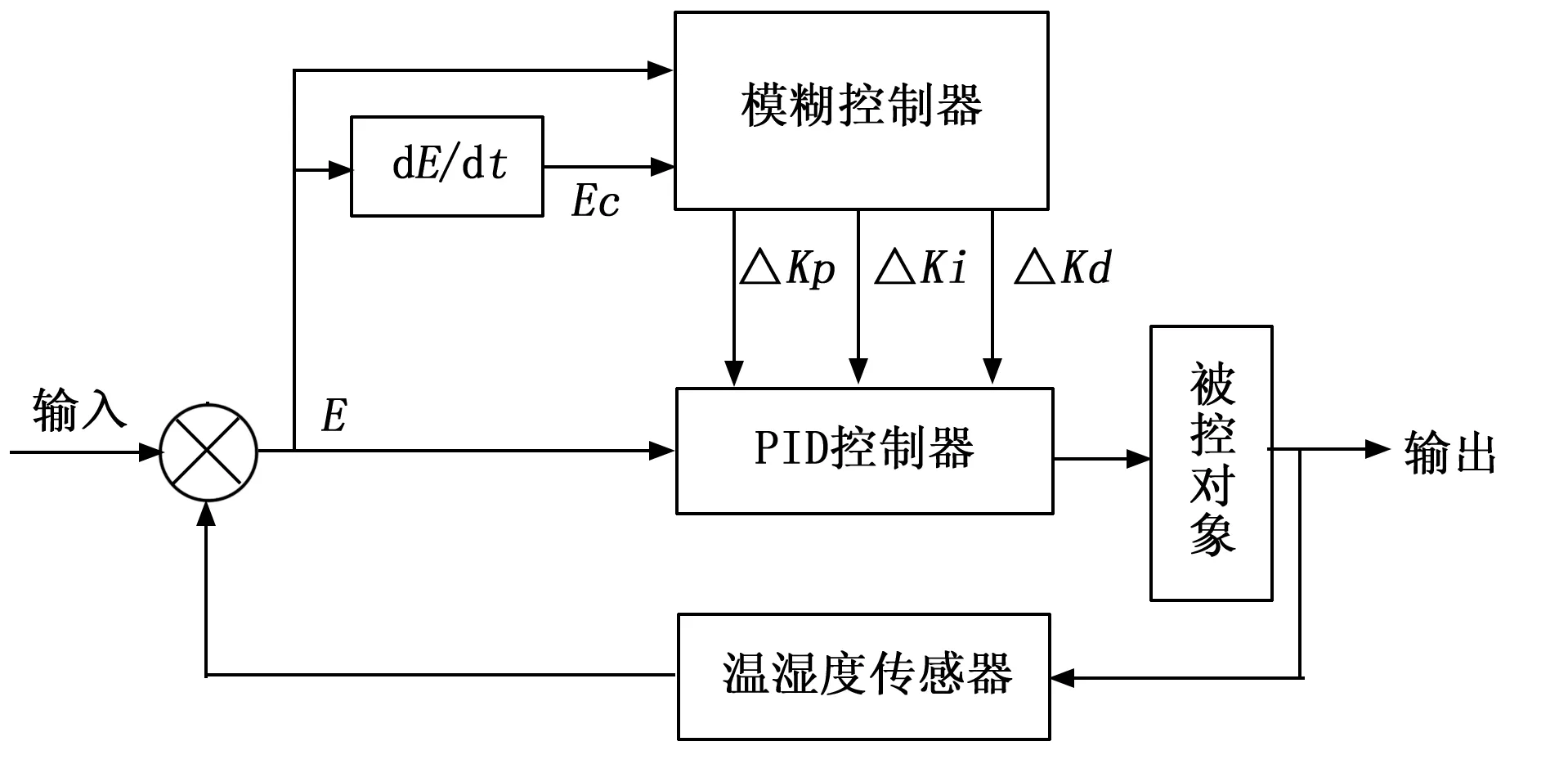
图5 模糊PID算法
根据误差E和误差的变化量Ec自动调节PID控制的参数,根据给定模糊规则进行模糊推理,最后对模糊参数进行解模糊,在线输出PID控制参数[19-20]。在制定模糊PID算法的规则时,以温度偏差E以及温度偏差变化率Ec器的输入变量,ΔKp,ΔKi,ΔKd作为模糊控制器的输出变量,建立双输入-三输出模糊控制系统,将模糊值分为7档,即NB(负大),NM(负中),NS(负小),ZO(零),PS(正小),PM(正中)以及PB(正大),其中输入变量E和Ec的模糊论域均取[-6,6],输入变量E和Ec的物理论域分别取[-20,20]、[-0.4,0.4],输出变量ΔKp,ΔKi,ΔKd的模糊论域均取[-3,3],输出变量ΔKp,ΔKi,ΔKd的物理论域分别取[-10,10]、[-1,1]和[-6,6]。结合专家经验和生产实践,调整规则如下:
1)当误差|E|较大时,为了使系统具有较快速的跟踪能力,应取较大的Kp和较小的Kd,但为了避免超调,应适当限制积分作用,故需取较小的Ki;
2)当偏差|E|为中等大小时,为了降低系统的超调量,Kp应取较小值,且为了兼顾系统的响应速度,Ki和Kd的取值应为中等大小,且Kd的值对系统影响相对较大;
3)当误差|E|为较小值时,为了使系统获得更好的稳定性,Ki和Kd的值应取较大值,且为了兼顾系统的抗干扰性能,当|Ec|值较大时,Kd应取较小值;当|Ec|的值较小时,Kd应取较大值。
基于以上分析,得到模糊规则表如表1,根据设定的模糊控制规则,得到ΔKp,ΔKi,ΔKd的曲面观测窗如图6~8所示,得到E和Ec的隶属度函数曲线如图9所示,ΔKp,ΔKi,ΔKd的模糊规则表建立好后,运行过程中,工业控制计算机通过对模糊逻辑规则的结果进行处理、查表和运算,对ΔKp,ΔKi,ΔKd进行在线自动调整,即可完成对Kp,Ki,Kd的实时整定。Kp,Ki,Kd的计算公式如式(1),式中Kp、Ki、Kd是PID控制器的比例、积分、微分系数;K′p、K′i、K′d是最初整定的PID参数;ΔK′p、ΔK′i、ΔK′d是通过模糊推理得到的PID参数增量值。
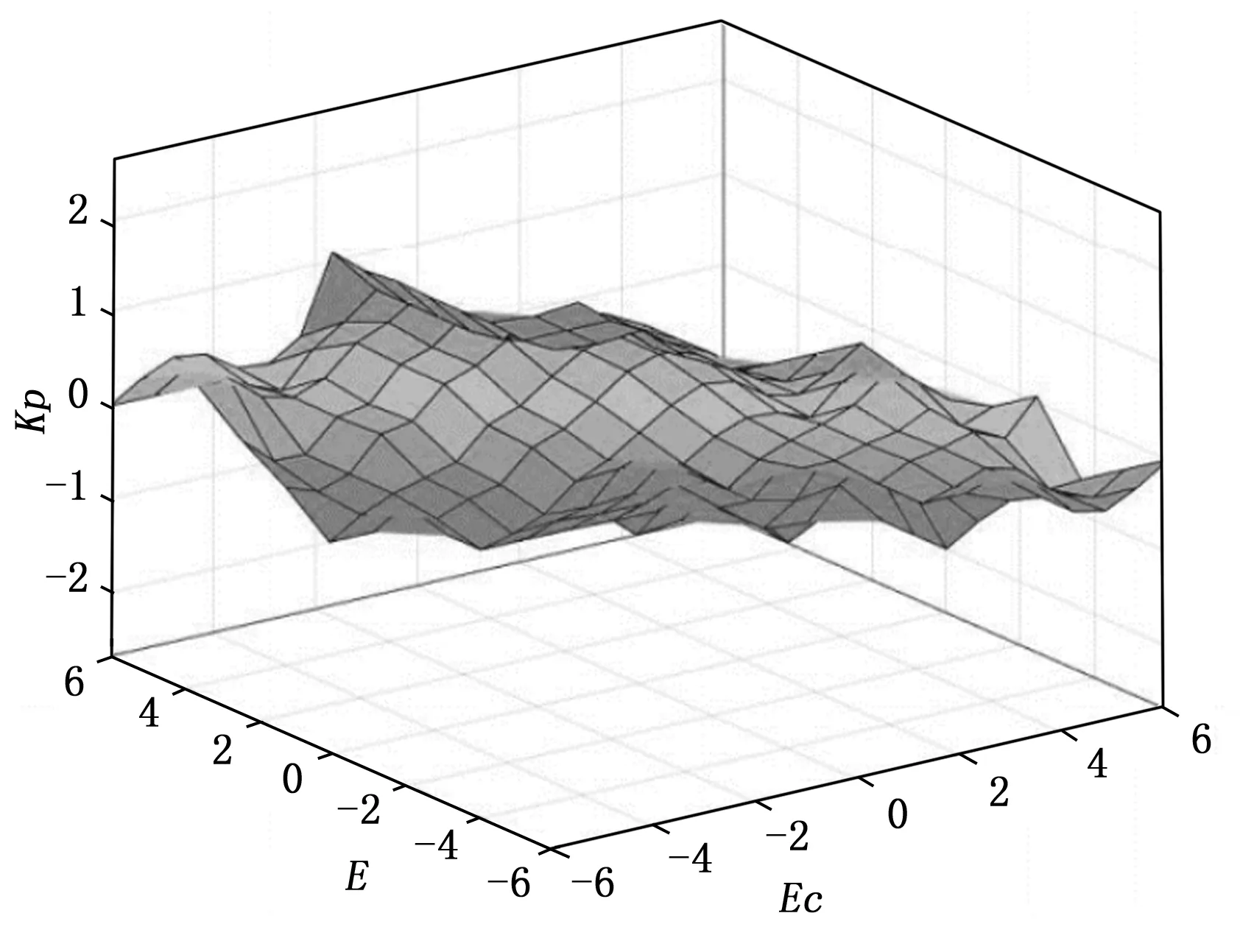
图6 ΔKp曲面观测窗

表1 模糊控制器ΔKp,ΔKi,ΔKd模糊规则表
(1)
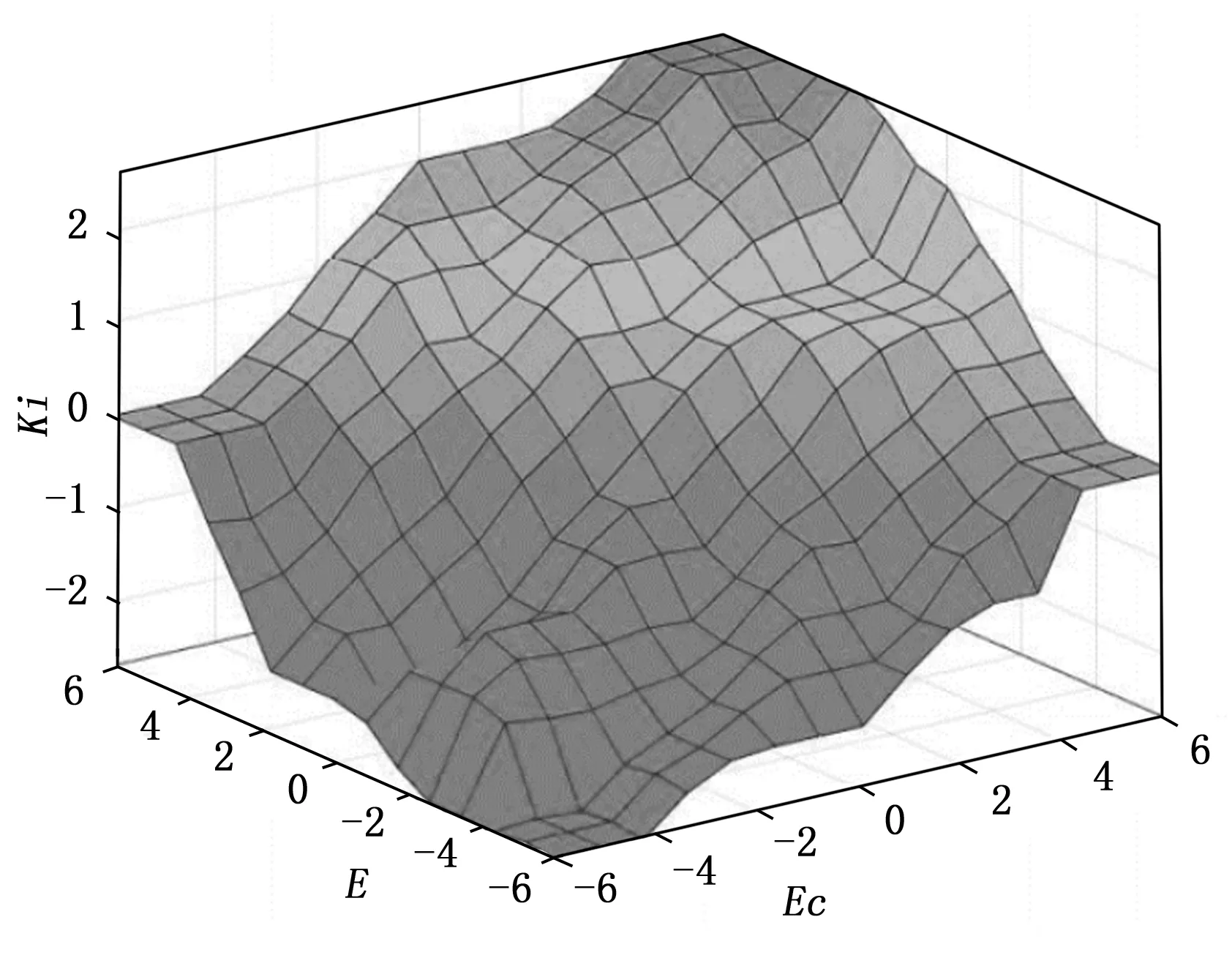
图7 ΔKi曲面观测窗

图8 ΔKd曲面观测窗
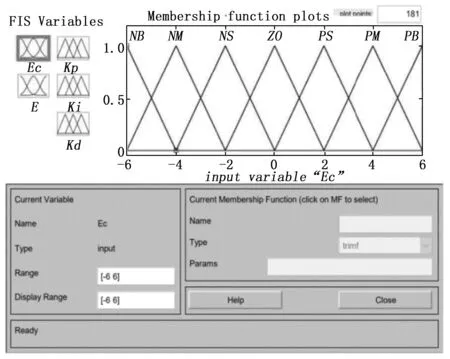
图9 隶属度函数曲线
2.2 温度控制流程
温度控制过程中,设定目标温度为T′,当前温度为T,以T′和T的差值为依据利用P-Fuzzy-PID控制方法进行分段控制。
当|T′-T|≥10%时,首先启动恒温水箱执行P控制进行调节;
当5%≤|T′-T|≤10%时,恒温水箱执行模糊PID控制进行调节;
当|T′-T|≤5%时,关闭恒温水箱,启动加热制冷循环机执行PID控制方法继续进行精细调节,直至实时监测舱室温度等于设定温度,而后加热制冷循环机待机,程序流程图如图10所示。
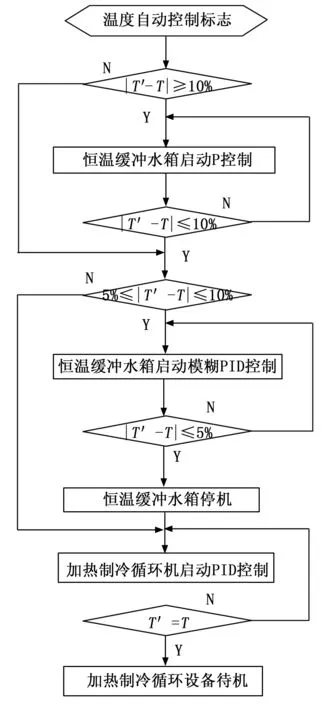
图10 温度控制程序流程
2.3 温度控制结果
在温度控制系统实验过程中,密闭舱室在零时刻的初始温度为21℃,设定目标温度为55℃。给定PID控制的初始值K′p=8、K′i=0.5 、K′d=1,工业控制计算机通过对模糊逻辑规则结果进行处理、查表和运算,即可完成对Kp,Ki,Kd的实时整定。实验共持续120 min,控制过程分P控制、模糊PID控制和PID控制3个阶段,舱室内的空气温度由均匀布放在舱室两侧内壁的8个温度传感器测得,各传感器的具体物理位置布放示意见图4中部所示,温度变化曲线如图11所示。
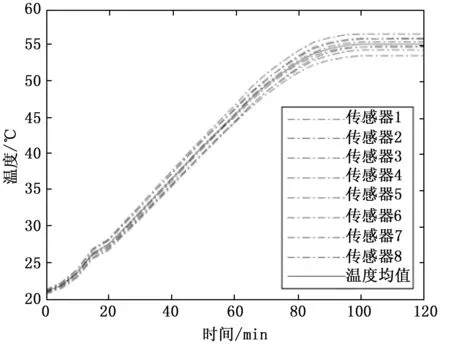
图11 舱室温度控制变化曲线
0~70 min,恒温水箱执行P控制,温度上升较为迅速,在70 min时刻,舱室温度达到49.59℃;70~90 min,恒温水箱继续单独工作,系统转入模糊PID控制过程,在90 min时刻,舱室空气平均温度达到54.6℃;此时,恒温水箱停机,加热制冷循环机单独工作,系统转入PID控制过程,在加热制冷循环机单独控制之下,舱室温度在55.0±0.5℃附近基本保持不变,控制精度达到99.09%。
可以看出,温度控制过程中,控制结果没有超调量,且系统响应较为迅速。但由于舱室长度较长、测定温度的传感器布放在舱壁的两侧且各自间距离较远、紫铜管中水回流不畅、导热材料导热效果不佳等等物理原因,各传感器温度在后期出现了差距变大的现象。
3 湿度控制系统
3.1 湿度控制方法
湿度控制过程中,设定目标湿度为RH′,当前湿度为RH,若RH′>RH则启动加湿器,若RH′
为了在不同论域内采用不同的控制方法实现湿度的分段控制,湿度控制系统采用P-Fuzzy-PID控制方法,即起始|r(t)-c(t)|≥10%时,使用比例控制,以提高响应速度,快速接近控制需求;当|r(t)-c(t)|≤10%时,系统转入模糊PID控制,以提高系统的阻尼性,减小超调量;当|r(t)-c(t)|≤5%时,系统转入PID控制,利用积分环节消除稳态误差,以提高系统的控制精度,控制原理图如图12所示。
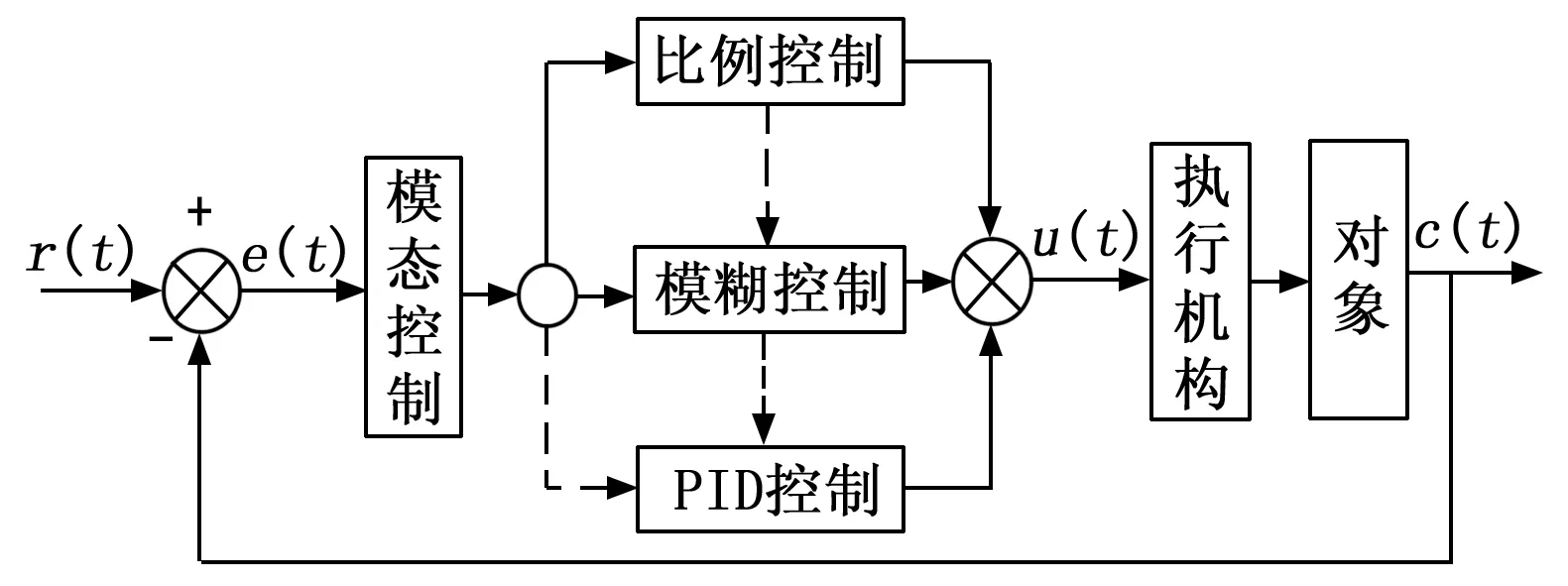
图12 P-Fuzzy-PID控制原理
3.2 实验结果与分析
在进行湿度控制时,输入目标湿度值为50%RH,初始湿度测量值为35%RH,温度测量值为54.8℃,启动控制过程。
0~30 min,加湿器执行P控制,湿度上升较为迅速,30 min时,舱室湿度达到46.10RH%;30~90 min,加湿器执行模糊PID控制,90 min时,舱室湿度达到49.77RH%;90 min之后,系统执行PID控制,舱室湿度维持在50.0±1.0RH%附近并基本维持不变,控制精度达到98%,此时,舱室内空气温度平均值为55.5℃。
舱室内湿度变化曲线如图13所示,可以看出,湿度控制过程中,湿度有少量超调,但达到初步精度的时间很短,达到目标精度后舱室湿度较为稳定,且湿度控制过程中对温度的影响在温度控制精度要求范围内。对比温度和湿度的控制结果,温度控制的精度要稍高于湿度控制,其原因在于,加湿方法主要是通过加湿器产生水蒸气,再由鼓风机鼓入舱室内部,除湿方法主要是通过除湿机向舱室内部鼓入干燥空气,加湿过程和除湿过程的响应均较快,波动稍大,而温度控制方法来自于舱壁上密布的紫铜管的热传导,响应较慢,波动较小。
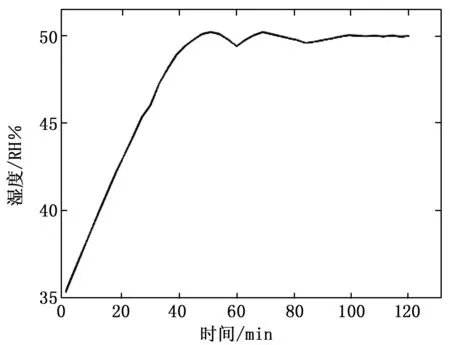
图13 舱室湿度控制变化曲线
4 结束语
1)本文对密闭舱室温湿度控制策略进行了深入研究,针对非确定性密闭舱室温湿度控制需求,设计了一型温湿度动态控制系统,基于模糊PID控制算法,在不同论域内采用不同的控制方法实现分段控制,实际试验结果表明,设计的温度控制系统能够在70分钟内使舱室温度达到初步目标精度,90分钟内满足控制要求精度;设计的湿度控制系统能够使舱室湿度在30分钟内使达到初步精度,90分钟内满足控制要求精度,应用的P-Fuzzy-PID控制方法在密闭舱室的温湿度控制实践过程中收到了较好效果。
2)本文设计的控制系统响应速度快,温度控制过程中无超调量,湿度控制过程中达到初步目标精度速度快,系统稳定可靠。设计并论证的系统较为精确地模拟了潜艇舱室温湿度环境,研究结果有一定理论价值和工程价值。
猜你喜欢
装备环境工程(2022年9期)2022-10-13
农村百事通(2022年7期)2022-07-14
包装工程(2022年12期)2022-07-04
船舶(2022年3期)2022-07-02
故事作文·低年级(2021年2期)2021-02-04
37°女人(2018年11期)2018-11-09
好日子(2018年9期)2018-10-12
婚姻与家庭·性情读本(2017年12期)2018-01-11
大陆桥视野·下(2017年11期)2017-10-31
科学与财富(2017年26期)2017-09-23
