基于D-1DCNN的轴向柱塞泵故障诊断研究*
2021-11-27 04:35徐昌玲黄家海钮晨光马晓宝
机电工程 2021年11期
徐昌玲,黄家海,2,兰 媛,2*,武 兵,2,钮晨光,2,马晓宝,2,李 斌
(1.太原理工大学 机械与运载工程学院,山西 太原 030000;2.太原理工大学 新型传感器与智能控制教育部重点实验室,山西 太原 030000;3.太原卫星发射中心 技术部,山西 太原 030027)
0 引 言
柱塞泵为液压系统提供动力,其性能的好坏直接影响液压系统的工作性能。由于轴向柱塞泵存在结构紧凑、寿命长、容积效率高等优点,在工程机械各个领域得到了广泛应用。
随着科技的发展以及应用场合的更高要求,轴向柱塞泵的结构越来越复杂,其故障表现形式也呈现多样化。因此,对柱塞泵进行有效的故障诊断,以保障液压系统工作的正常运转具有重要意义[1]。
轴向柱塞泵有3对摩擦副,分别为:(1)柱塞与缸体之间的摩擦副;(2)滑靴与斜盘之间的摩擦副;(3)缸体与配流盘之间的摩擦副。摩擦副的磨损以及中心弹簧预紧力的下降会引起柱塞泵产生几种典型的故障,如:松靴、配流盘磨损、滑靴磨损、中心弹簧失效[2]等。
传统的柱塞泵故障诊断方法分为3步:(1)采集故障信号;(2)提取故障特征;(3)识别故障状态。杜振东[3]对故障特征进行了敏感度分析,并将其与EMD相结合,对柱塞泵的故障做出了准确诊断。励文艳[4]采用了局部S变换与ELM相结合的方法,对柱塞泵的滑靴磨损故障进行了有效诊断。胡晋伟[5]提取出了柱塞泵在正常状态和滑靴磨损状态下的时域特征,并将其输入到ELM中,实现了对柱塞泵滑靴的故障诊断。
采用以上的传统方法虽然可以对柱塞泵的各类故障进行诊断,但是仍然存在很大的缺陷。由于柱塞泵的结构复杂,每一种故障需提取的特征不尽相同,需要依靠专家和技术人员丰富的专业知识积累。同时,针对同一柱塞泵的不同故障,需设计出不同的故障特征,人工设计故障特征的过程费时费力,因而造成其故障特征提取困难。
卷积神经网络(convolution neural network, CNN)能够弥补传统故障诊断中的缺陷,它将原始故障信号直接输入到模型中,可以实现输入到输出的端对端故障诊断。与其他神经网络相比,CNN有稀疏连接、权值共享等特点,这使得其网络规模可以缩减,也提高了其运算效率。CNN对数据有强大的自适应学习能力,能够提取到原始数据中隐含的特征信息,以实现对数据特征的深层提取。
谷玉海[6]将振动信号转化为EMD二值图像,将期输入到CNN中,对滚动轴承进行了故障诊断。针对滚动轴承保持架故障特征难以获取这一难题,郑一珍[7]采用EMD和SDP对故障特征进行了融合,把特征融合后生成的SDP图像直接输入到CNN中进行图片特征识别,采用该方法对滚动轴承保持架故障进行识别,其识别率达到了99%以上。
采用CNN进行故障诊断的方法主要分为两类:(1)将一维信号转化为包含信号特征的图片或者二维矩阵,输入到CNN中,对故障进行分类;(2)将一维信号输入到一维CNN中[8]。
CNN的图片识别过程需要较长的训练时间。将振动信号直接输入到1DCNN中,有时不能得到准确的故障诊断结果,这与1DCNN没有完全提取信号特征有关。通过对CNN中卷积层与池化层的多层堆叠,可以得到深度卷积神经网络(deep convolutional neural networks, DCNN)。处理复杂的数据或者复杂的分类时,深层CNN模型比浅层CNN模型具有更好的特征提取能力和更复杂的映射能力[9]。
针对采用传统方法对柱塞泵故障进行诊断时所存在的问题,笔者提出一种基于深度一维卷积神经网络的轴向柱塞泵故障诊断方法,即将采集到的柱塞泵不同状态的一维振动信号输入到D-1DCNN中,通过卷积层和池化层进行信号特征的自适应提取,通过分类器输出诊断结果,并对网络的参数进行调整,以提高模型的故障诊断准确率。
1 卷积神经网络
卷积神经网络本质是一个多层感知机。世界上第一个卷积神经网络是1998年由美国科学家Yan Lecun提出的LeNet-5。采用该卷积神经网络可以完成对手写数字的识别[10]。
卷积神经网络的训练过程可以分为两步,即前向传播和反向传播。前向传播通过卷积层和池化层对数据进行深层特征提取,得到不同数据类型的特征;反向传播使用梯度下降法,对模型中的权重和参数进行反复调节,得到适用于该次故障诊断的最优模型[11]。
卷积神经网络的主要结构包括:卷积层、池化层、全连接层和分类器。具体结构如图1所示。
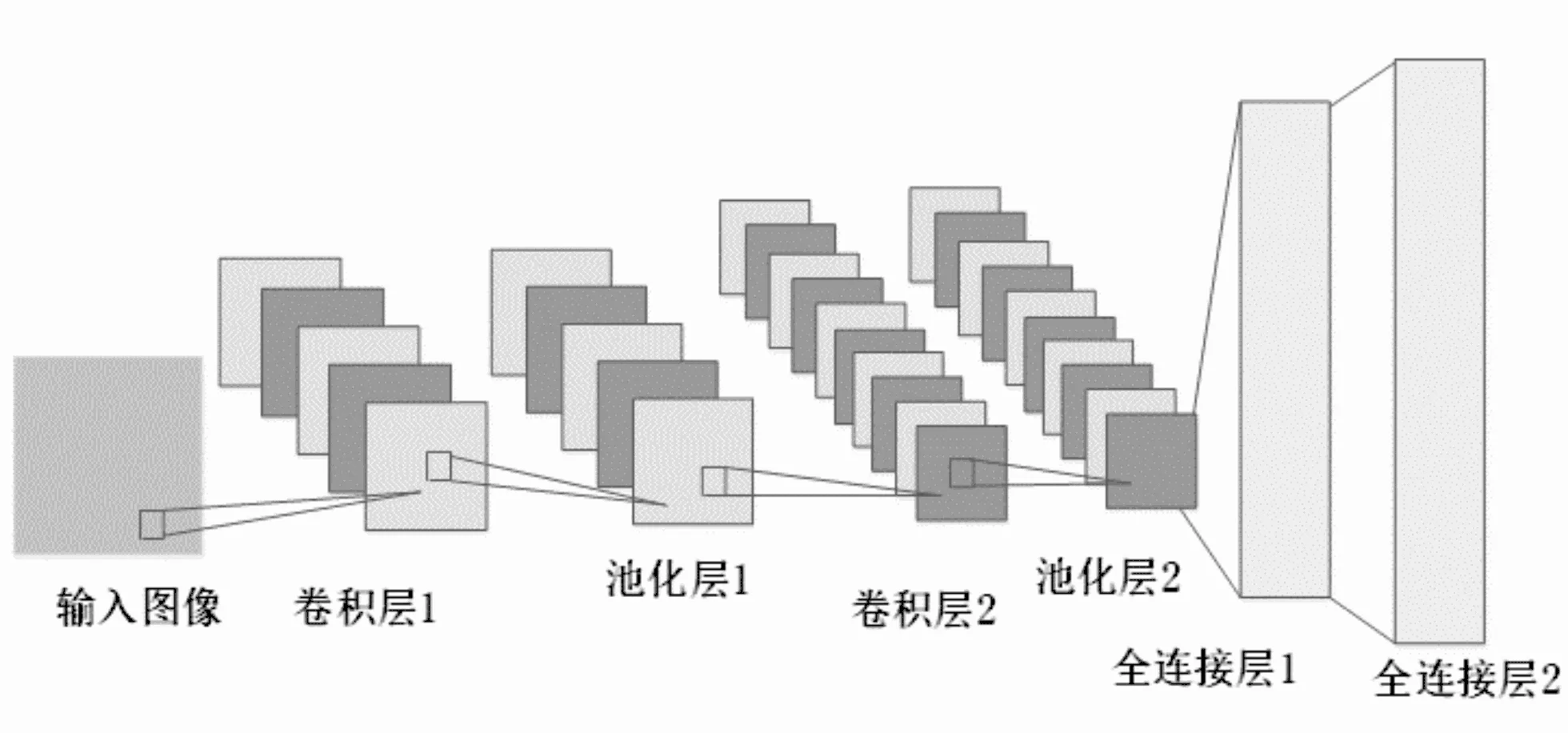
图1 卷积神经网络结构图
1.1 卷积层
卷积层由多个卷积核构成。卷积层的主要作用是通过对数据进行卷积操作,来完成信号特征的自适应提取。每层卷积后,数据的输出特征称作特征图。在卷积层中,每一个卷积核的参数是共享的。
卷积层可以表示为:
(1)
式中:a—卷积层的输入;g(i)—第i个卷积核所经卷积操作后得到的特征图;w—权值;b—矩阵;x,y,z—数据的维度;z—通道数。
数据经过卷积操作后,需要激活函数对数据进行非线性转换,即:
y(i)=f(g(i))
(2)
式中:f—激活函数;y(i)—第i个卷积层的输出。
1.2 池化层
池化层的作用是对卷积操作后的数据进行降维,同时提取数据特征。池化层可以缩小模型的规模,提高运算的速度,并防止过拟合现象的发生。池化层有两种形式:最大池化输出的是局部感受野最大值,平均池化输出的是局部感受野平均值。
最大池化和平均池化的公式分别为[12]:
(3)
(4)
1.3 全连接层和分类器
全连接层在最后一层池化层之后,其作用是将池化层输出的数据平铺成一维向量,输入到SoftMax分类器中进行分类。
全连接层和分类器的具体运算过程如下[13]:
(4)
(5)

2 深度一维神经网络
2.1 一维卷积神经网络
与二维卷积神经网络类似,一维卷积神经网络也包括:卷积层、池化层、全连接层和分类器。与二维卷积不同的是,一维卷积神经网络可以直接对一维信号进行特征提取。二维卷积神经网络的卷积核主要以方核为主,一维卷积神经网络的卷积核不再使用方核,其卷积核的尺寸为1×n型。
一维卷积神经网络用于处理数据的原理是把一维数据看成高度为1个像素的图像[14]。一维卷积神经网络数据处理图如图2所示。
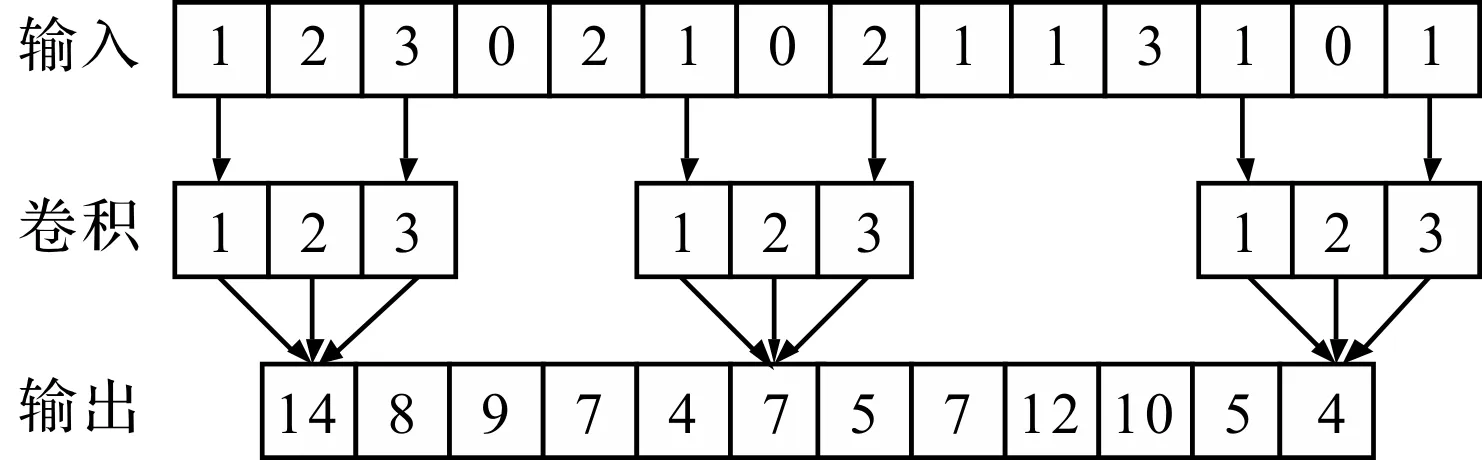
图2 一维卷积神经网络数据处理
图2中,输入为一维数据,卷积核尺寸为3,步长为1。
2.2 深度一维卷积神经网络
一维卷积神经网络对柱塞泵故障特征的提取不完整,达不到故障诊断的准确效果。因此,笔者提出一种基于深度一维卷积神经网络的故障诊断方法。深度一维卷积神经网络基于1DCNN的网络结构,通过增加卷积层的数量,使网络模型对特征的提取更加完善。
D-1DCNN具体结构图如图3所示(其中包含6个卷积层,3个池化层)。
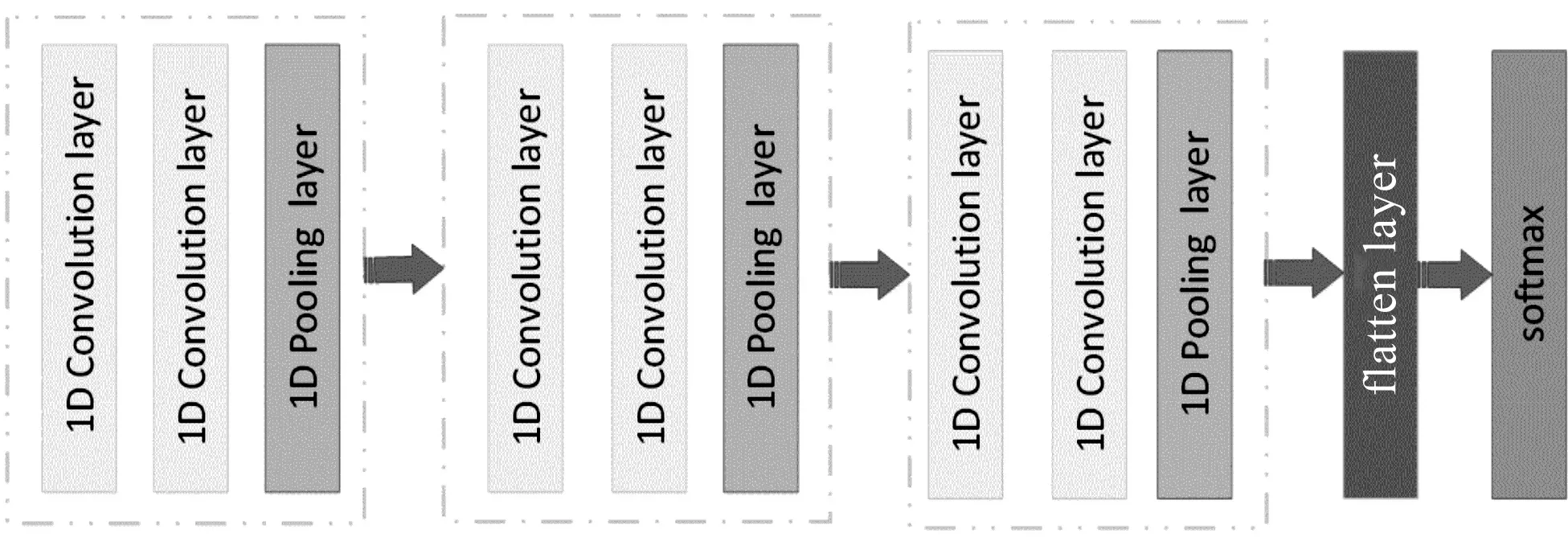
图3 D-1DCNN结构图
与1DCNN不同,D-1DCNN不再是一层卷积层与一层池化层的堆叠,而是在每层卷积层与池化层之间增加了一层卷积层,这样就可更为全面地进行特征的提取。平铺层将最后一层池化层提取的特征进行平铺,最后选择SoftMax进行分类。
3 轴向柱塞泵故障诊断测试系统
本次实验的具体研究思路如图4所示。
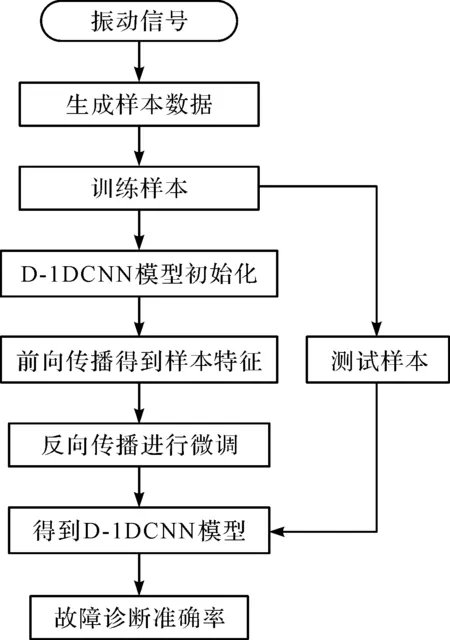
图4 研究思路流程图
图4中,首先采集柱塞泵正常、松靴、滑靴磨损、中心弹簧失效、配流盘磨损5种状态下的振动信号,将原始信号进行分组,并分别加以标记,生成样本数据(训练样本与测试样本按照4 ∶1随机划分);将训练样本输入到D-1DCNN网络结构,通过前向传播和反向传播,获得了训练样本的特征,并得到D-1DCNN的最终模型;将测试样本输入到已经保存好的D-1DCNN模型中进行测试,得到故障识别的准确率。
3.1 实验对象
本次实验对象为力士乐A10SO45型斜盘式轴向柱塞泵,其主要结构包括:配流盘、斜盘、传动轴、滑靴、柱塞、中心弹簧等,如图5所示。
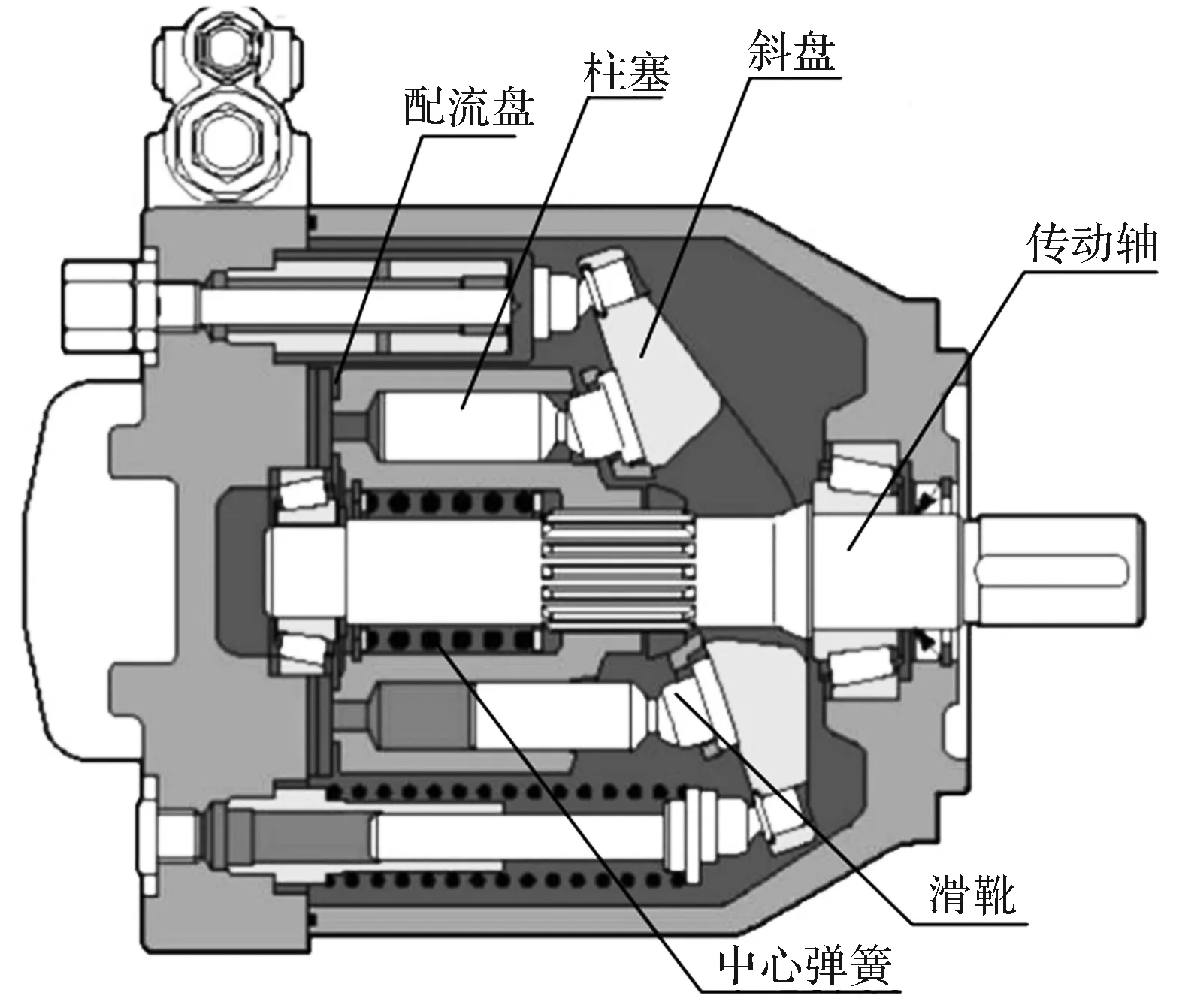
图5 力士乐A10V轴向柱塞泵结构图
柱塞泵的主要故障类型包括:松靴、滑靴磨损、配流盘磨损、中心弹簧失效等,分别阐述如下:
(1)松靴故障。是指滑靴与柱塞球头之间的间隙增大。引起松靴的原因有两个:①在生产制造时,滑靴与柱塞球头的尺寸不合理,存在较大间隙;②由于柱塞泵长时间工作,环境中的油液和粉尘进入到柱塞球头与滑靴之间,粉尘对柱塞球头和滑靴造成压力,迫使二者之间的间隙不断增大。松靴故障严重到一定程度时,会导致脱靴。
(2)滑靴磨损。是指柱塞泵启动或者停止的瞬间,滑靴受到较大冲击力,滑靴与斜盘之间的油膜厚度不稳定,使间隙发生改变,导致滑靴与斜盘之间产生碰撞并造成滑靴磨损。滑靴磨损会使泵壳振动加剧。
(3)配流盘磨损。是指斜盘倾角增大,油膜楔形增大,配流副的工作条件变差,一般的过滤精度无法过滤掉油液中的污染物,造成配流盘磨粒磨损。配流盘磨损会造成柱塞泵内部配流系统紊乱。
(4)中心弹簧失效。是指由于柱塞泵长时间工作使弹簧的预紧力减小,造成柱塞泵内部的密封性变差,从而引起内部油液的泄漏[15,16]。
3.2 实验方案设计
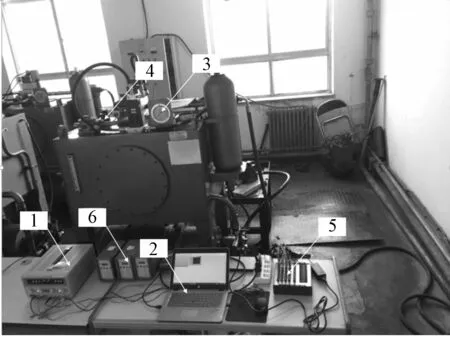
故障诊断试验系统原理图如图6所示。
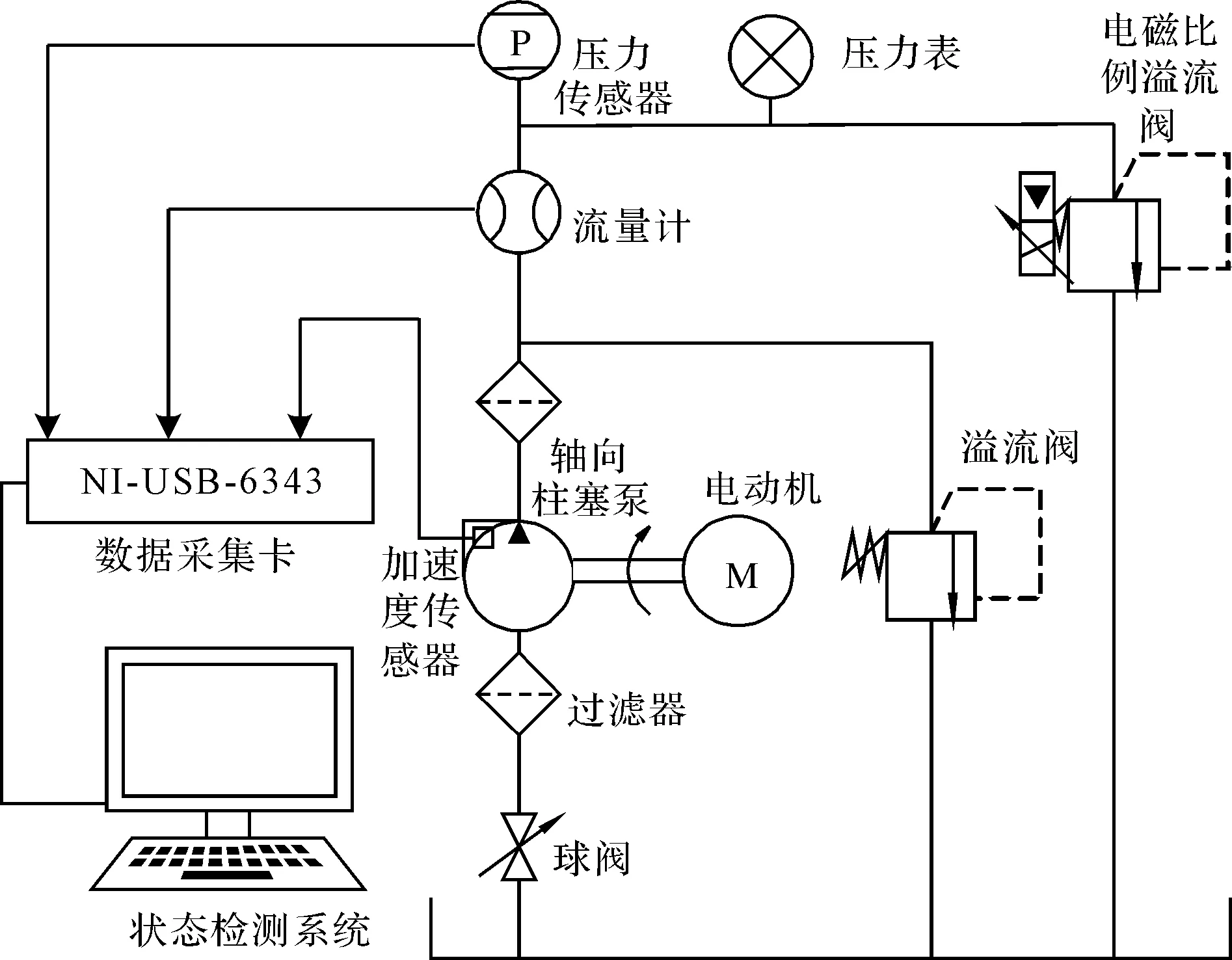
图6 轴向柱塞泵故障诊断试验系统原理图
图6中,电机带动柱塞泵运动,加速度传感器采集柱塞泵的振动信号[17,18];耦合器的作用是对振动信号进行放大,采集卡采集放大后的数据,储存到电脑中;主路压力为10 MPa,柱塞泵的额定转速为1 480 r/min;采集卡选用的型号为NI-USB-6343,将采集卡连接到LabVIEW软件进行数据的采集;采样频率为45 kHz,采样时间是0.2 s,每种状态下采集20组数据。
轴向柱塞泵典型故障试验台如图7所示。
3.3 传感器布设及采集参数设置
轴向柱塞泵内部结构复杂,其工作状态可以通过结构的振动形式表现出来。因此,通过分析柱塞泵的振动信号可以对其故障状态进行有效诊断。
加速度传感器用于柱塞泵振动信号的采集,其具体的布设位置如图8所示。
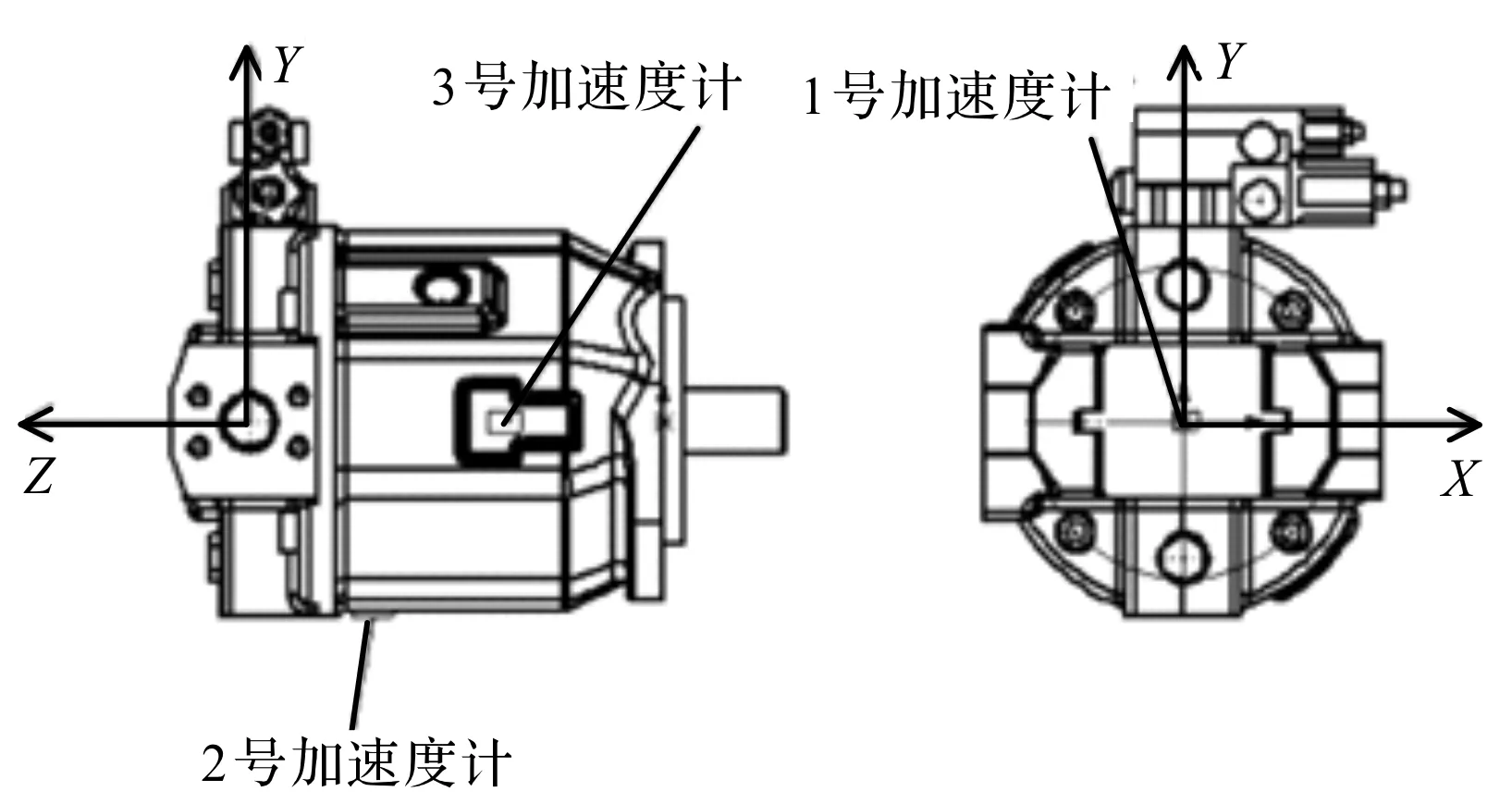
图8 三轴加速度传感器布点位置
加速度传感器的方向如表1所示。
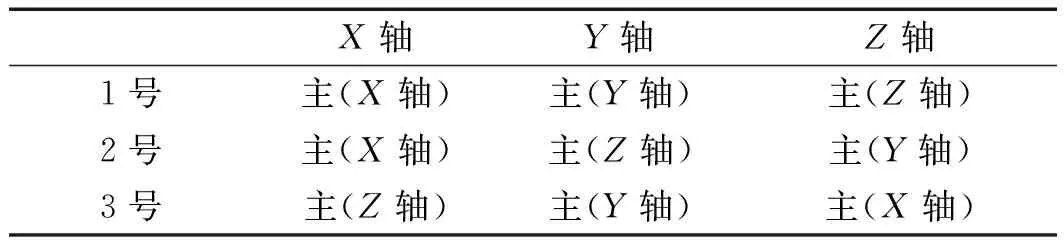
表1 三轴加速度传感器方向说明
4 实验及结果分析
4.1 样本集生成
由于受环境的干扰小,轴向柱塞泵泵壳的振动信号包含丰富的故障信息。笔者采集不同状态下的振动信号,每种状态的振动信号为1 800 000个点,选取样本长度9 000个点;每种状态生成200个样本,以标签标记,共计1 000个样本;训练样本与测试样本随机产生,比例为4 ∶1。
具体样本集如表2所示。
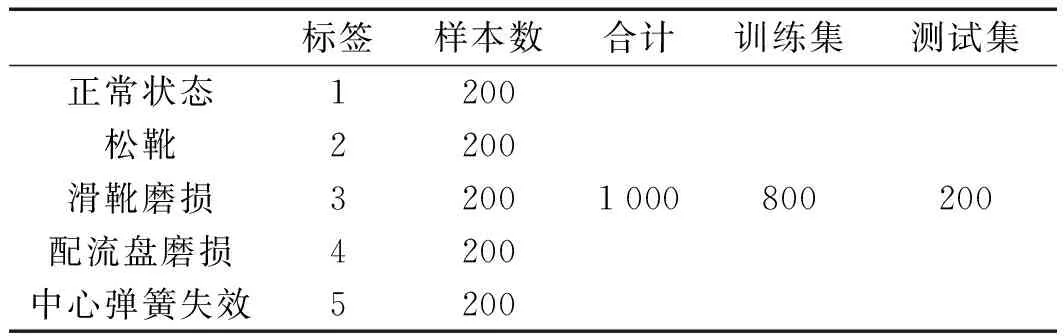
表2 样本集
4.2 深度一维卷积神经网络构建与参数设置
此处所用的平台是Google Colab,编程语言为pychon,编程环境为tensorflow2.0。
D-1DCNN的具体结构如表3所示。
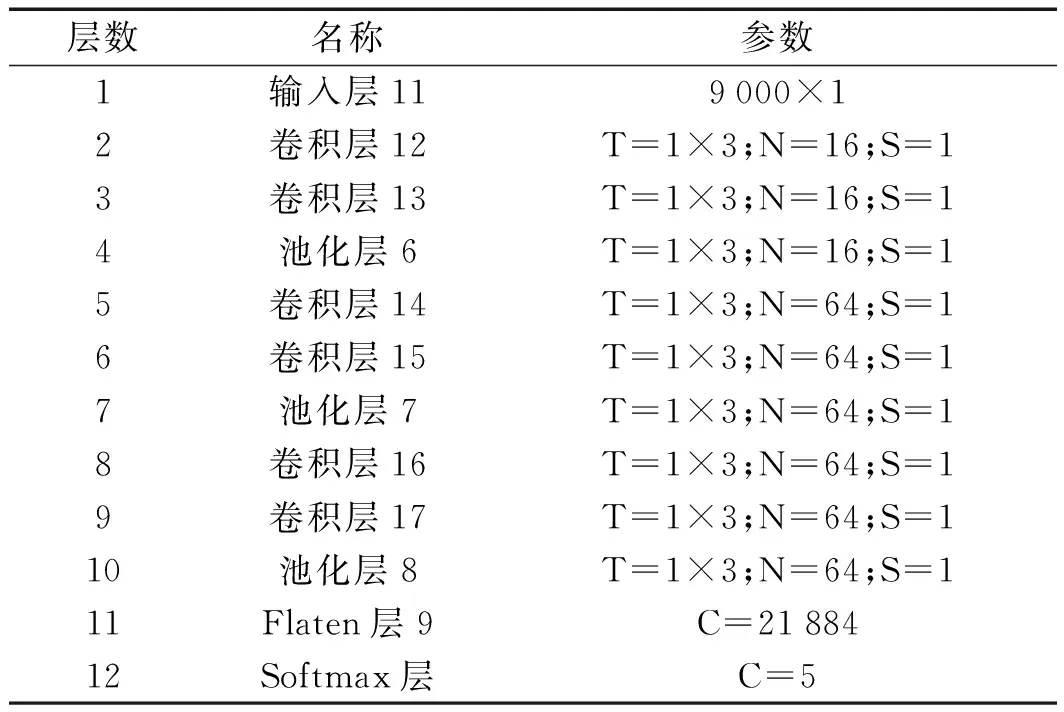
表3 D-1DCNN网络参数设置
输入数据维度为9 000×1。在D-1DCNN中包含6个卷积层,3个池化层,卷积核的大小为1×3,步长为1;池化层所用的池化方法为最大池化。在网络中,每层卷积操作中所使用的激活函数为正切函数;使用的优化器为Adam优化器,学习率为0.01,迭代次数设为10。
4.3 对模型进行优化
(1)此处卷积核大小分别选取为1×1、1×3、1×5、1×10,运行网络得出测试样本的识别准确率。
卷积核大小对网络性能的影响如表4所示。

表4 卷积核大小对网络性能影响
由表4可知:卷积核越大,训练时间越长,模型中需要更新的参数就越多。识别的准确率随着卷积核尺寸的增大而先上升后下降。因此,当卷积核选择1×3时,识别的准确率最高。
(2)卷积核的大小选择1×3。学习率对网络性能的影响如表5所示。

表5 学习率对网络性能的影响
由表5可知:随着学习率的升高,模型训练所用时间越来越短;当学习率为0.01时,模型故障诊断的准确率最高。
(3)在实验中,此处分别采用最大池化和平均池化两种方法。不同池化方法对网络性能的影响如图9所示。
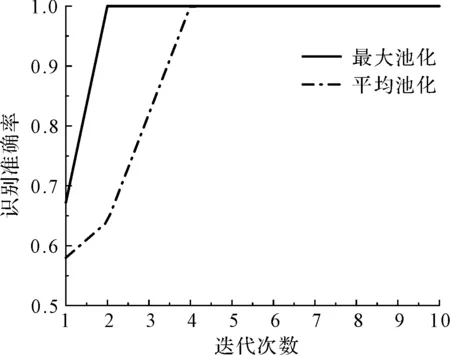
图9 不同池化方法对网络性能影响
由图9可知:在深度一维卷积神经网络中,经过10次迭代,两种池化方式所得到的故障识别准确率相同,均为100%,使用最大池化模型的收敛速度快。因此,本次模型选择最大池化。
(4)笔者选用SGD和Adam两种常用的优化器对D-1DCNN模型参数进行优化。不同的优化器对网络性能的影响规律,如图10所示。
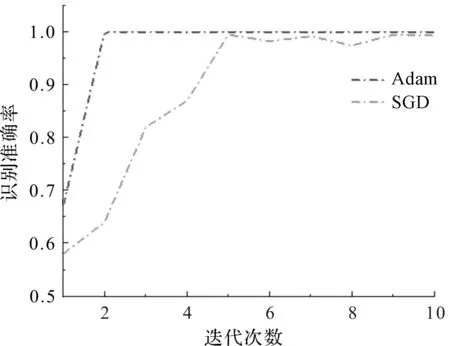
图10 不同优化器对网络性能影响
由图10可知:相较于SGD优化器,Adam优化器对该实验网络模型参数的优化性能更好,模型的收敛也更好。
4.4 对比试验
为了验证D-1DCNN在斜盘式轴向柱塞泵故障诊断上的优势,本文设计该实验与1DCNN进行对比。
1DCNN具体结构与参数如表6所示。
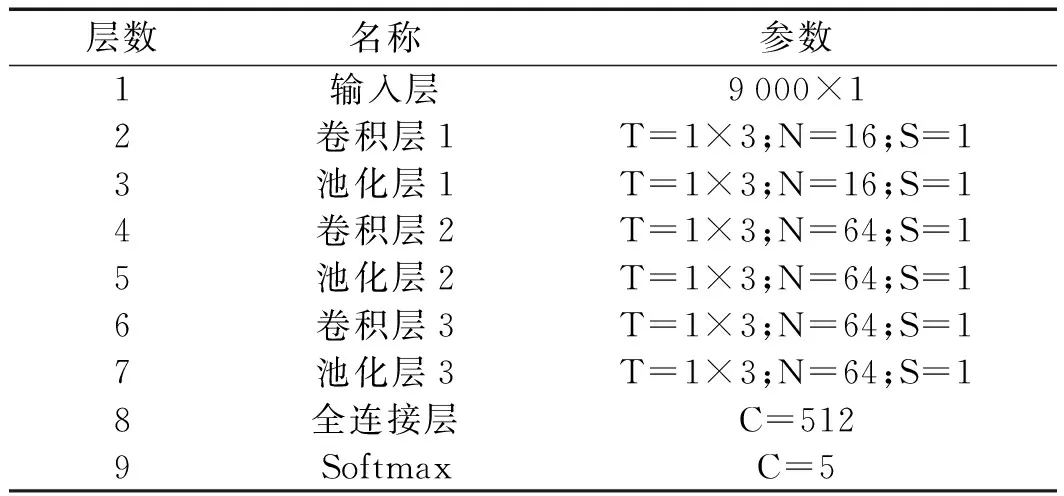
表6 1DCNN结构
表6中,采用最大池化方式,学习率为0.01,优化器为Adam,每个卷积层的激活函数为正切函数,迭代次数为20。1DCNN模型也同样经过优化。
为了防止单次实验的偶然性对实验结果产生影响,本次实验设置每种网络运行10次,求得故障诊断准确率的平均值与标准差。
具体实验结果如表7所示。

表7 实验结果
4.5 结果分析
由表7可知:对A10SO45型斜盘式轴向柱塞泵的故障诊断中,D-1DCNN的诊断精度最高,达到100%,且标准差最低;1DCNN的诊断精度为95.20%。
5 仿真实验
为了探究D-1DCNN网络模型针对不同对象在故障诊断方面的性能,笔者设计了一个仿真实验。该仿真实验中使用了美国西储大学的轴承数据。
其实验平台如图11所示。
图11 西储大学轴承故障实验台
图11中,轴承的型号为SKF轴承,采样频率为12 kHz,电机转速为1 730 r/min。轴承故障分为内圈故障、外圈故障、滚动体故障3类。其中,外圈损伤点位置的不同会对轴承的振动响应有不同影响。因此,分别设置外圈故障损伤点在外圈3点钟位置、6点钟位置、12点钟位置,由此产生3类外圈故障数据。
本文分别选取故障直径为0.007″的驱动端轴承故障数据中的4类故障(内圈故障、滚动体故障、外圈在3点钟位置故障、外圈在6点钟位置故障)及正常状态,对共计5类数据进行故障诊断。选取每类数据中的驱动端加速度时间序列数据进行仿真实验。
针对每种状态数据,本文选取前1.2×105个点,样本点数为600;每种数据生成200组样本数据,共计1 000组,训练样本与测试样本比例为4 ∶1。
具体样本集如表8所示。
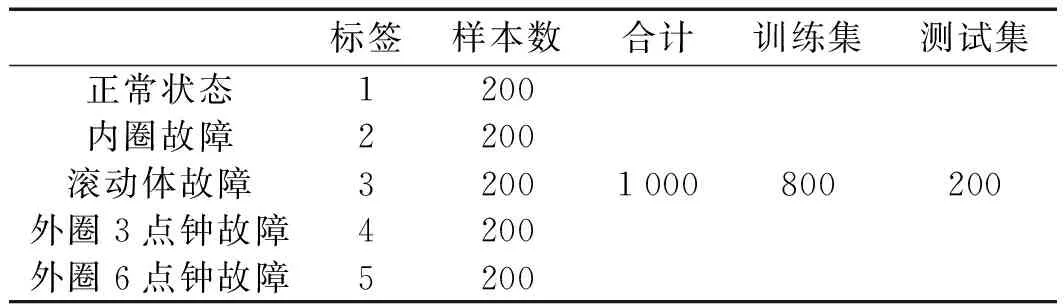
表8 西储大学轴承数据样本集
笔者将样本分别输入到D-1DCNN与1DCNN中进行仿真实验(网络具体参数在上文中已介绍);设每种网络运行10次,求得故障诊断准确率的平均值与标准差。
实验结果如表9所示。

表9 仿真实验结果
由表9可以看出:相对于1DCNN,D-1DCNN在轴承的故障检测方面的准确率更高、稳定性更好。
6 结束语
本文提出一种基于深度一维卷积神经网络的斜盘式轴向柱塞泵故障诊断方法,以提高模型的故障诊断准确率,并用西储大学轴承数据进行了仿真实验,以证明该方法的普适性。主要研究结论如下:
(1)D-1DCNN可以自动提取一维信号的高阶特征,不需要人工设计并手动提取信号特征,实现了实时智能化故障诊断;
(2)D-1DCNN对斜盘式轴向柱塞泵的故障诊断率可达到100%,比1DCNN的故障诊断率更高,也更稳定;
(3)在面对不同对象进行故障诊断时,D-1DCNN仍具有良好的诊断性能,具有一定的普适性。
在后续的研究中,笔者将使用轴向柱塞泵的其他信号,例如流量信号和压力信号,作为特征参量输入到D-1DCNN中进行故障诊断,并比较D-1DCNN对于不同特征参量的故障诊断效果。
猜你喜欢
农业工程学报(2022年10期)2022-08-22
机械管理开发(2021年9期)2021-10-15
科技创新与应用(2021年23期)2021-08-30
机械工程与自动化(2021年1期)2021-03-18
装备制造技术(2020年3期)2020-12-25
无线互联科技(2020年15期)2020-11-10
煤气与热力(2020年8期)2020-09-08
科技传播(2020年6期)2020-05-25
雷达科学与技术(2018年3期)2018-07-18
探测与控制学报(2015年4期)2015-12-15