
高精度硅基集成光学温度传感器研究
2021-11-25 07:47王艺蒙舒浩文韩秀友
中国光学 2021年6期
王艺蒙,舒浩文,韩秀友
(1.大连理工大学 光电工程与仪器科学学院,辽宁 大连 116024;2.北京大学 信息科学技术学院 电子学系 区域光纤通信网与新型光通信系统国家重点实验室,北京 100871)
1 引言
温度传感器在医疗卫生、疫情防控、工业生产以及物资运输等方面具有重要应用价值。传统的温度传感器,如电阻温度传感器是利用敏感元件(如:热敏电阻、热电偶等)感应温度的变化使阻值发生变化,从而使输出电路的电压发生变化,有测温时间较长、受环境影响较大、测量误差较高、体积较大、对机械冲击较为敏感等缺点[1]。由于传统温度传感器存在诸多限制,集成光学温度传感器应运而生,其具有电磁免疫、精度高、体积小、响应时间快等优势,近些年引起了人们的极大兴趣[2-3]。其中,硅基集成光学温度传感器具有CMOS兼容、成本低、易于大规模集成的特点[4-6],被认为是下一代精密温度测量的主流方案之一[1,6]。目前,硅基集成光学温度传感器大部分是基于谐振腔结构[7-8],即利用温度对谐振状态的影响实现温度测量[9-16]。Guan等[9]利用亚波长光栅波导谐振波长随温度变化检测温度。Klimov等[11]采用布拉格光栅以及内置FP腔的光子晶体谐振腔位置随温度的变化检测温度,测量精度为175 mK。以上这些方法均为频谱检测,即通过对不同温度下谐振谱对应波长位置进行标定确定温度变化值,要求光源为宽谱光源或能够大范围调谐的光源,对宽谱光源来说,需要接收端配备昂贵的光谱仪设备,而且其测量精度也受限于光谱测量装置的分辨率;对可调谐光源来说,其光源端的系统复杂度高于单频光源;两者都增加了整个传感系统的价格、功耗以及系统复杂度。同时,这种办法对温度的测量往往需要线下DSP处理来标定谐振峰随温度漂移量,响应速度一般在0.1 s数量级[1]。
本文提出了一种基于单频激光测量的硅基快速温度传感系统,通过在不同温度下,级联微环阵列对单频激光综合响应的不同,构建光电二极管(PD)输出响应与温度变化的单调关系,从而实现实时高精度温度测量。通过对微环阵列的优化设计,在保证测量精度优于60 mK的同时,增加级联微环数量或调整微环谐振谱谱宽,可以进行测量区间的任意设计,实现响应范围覆盖−20~105 ℃,响应时间优于20 μs的精准快速测量的温度传感。
2 工作原理和结构设计
硅基微环谐振腔具有体积小、谐振品质因数高、可集成、谐振波长对外界温度十分敏感的特点,非常利于高精度的温度传感。本文基于硅基微环谐振结构进行高精度温度测量。硅基微环谐振腔的温度依赖于温度引起的折射率及其物理尺寸的变化。
根据硅基微环谐振腔的谐振条件得到温度对波导微环谐振波长的影响,如下

式中,neff为微环波导的有效折射率,λ为谐振波长。ng=neff−λ·∂neff/∂λ为群折射率。当温度变化时,微环有效折射率neff也会相应改变,导致谐振波长λ 发生变化,从而导致光谱漂移。
本文采用顶硅厚度为220 nm的标准SOI基体,硅波导尺寸为220 nm×500 nm,微环半径基准为50 μm,硅波导表面由2 μm的氧化硅包层覆盖,单个微环整体结构示意图如图1所示。

图1 硅基集成微环谐振腔示意图Fig.1 Schematic diagram of a micro-ring resonator
根据式(1)可以计算单个微环在不同温度下的波长响应。如图2(a)(彩图见期刊电子版)所示,当△T从0 ℃变化到7 ℃时,谐振中心波长从1550.0 nm转移到1550.56 nm。图2(b)左轴是输入波长固定时不同温度下输出光强的变化,可以看出温度高于18.75 ℃时光强一直维持在0.1以下,且探测光光强变化趋于平缓,右轴为单环输出光强对温度的导数随温度的变化情况(图2(a)的斜率)。对输出光强求导可得,谐振峰越远离输入波长,输出光功率对温度变化越不敏感,因而在入射光波长不变的情况下,单微环结构的温度探测范围受到谐振峰宽度的影响。为了提升单频光下的温度传感范围,本文提出了一种多微环级联结构(如图3)。微环阵列通过一根总线波导相连,其中每个微环的谐振中心波长是递增的,半径从50 μm变化到50.18 μm,相邻微环之间的半径差是20 nm。整体的阵列尺寸是300 μm×550 μm。此外,本文提出的20 nm的半径递减尺度在实际加工中对工艺精度和复杂度提出了较高要求,因此,实际应用时,需要结合工艺条件对微环尺寸的变化进行相应的设计和优化。
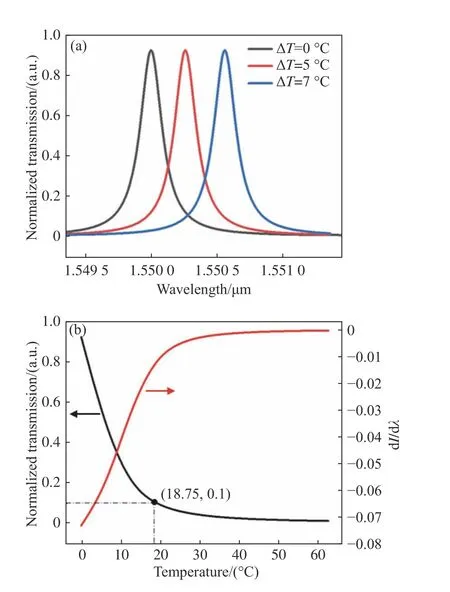
图2 (a)单个微环在不同温度下的波长响应结果;(b)左轴为输入波长固定时在不同温度下输出光强的变化;右轴为输入波长固定时输出光强对波长求导结果随温度的变化情况Fig.2 (a) Wavelength response results of a single microring at different temperatures; (b) normalized transmission is the change in output light intensity at different temperatures when the input wavelength is fixed; is the derivation for output light intensity versus wavelength varying with temperature when the input wavelength is fixed

图3 (a) 微环级联结构图; (b) 多个微环光谱响应结果Fig.3 (a) Micro-ring cascade structure diagram; (b) spectral response results of micro-ring arrays
为了验证多微环级联结构功能,采用10个等间距上下分布的微环级联方案。图3(b)计算了微环阵列对相同输入光波长的光谱响应结果[13]。通过设置λ 、r1、r2等参数可以确定微环谐振谱输出形状。其中,r1、r2分别为输入、输出波导与环的耦合系数。
为了研究微环阵列相比于单个微环结构的温度漂移覆盖范围,本文通过选择合理参数,使得微环阵列输出响应T的谐振中心频率以100 pm递增,共取10个微环,在该情况下,微环阵列的本征谐振谱响应范围(~2 nm@T>0.1)相比于单个微环形式的光谱响应范围(~1.25 nm@T>0.1)得到有效提升,因而能够有效增加温度响应范围。
3 性能分析
基于上述微环阵列结构,设计了一种硅基集成温度传感系统,如图4所示。温度测量系统由光源、微环阵列、探测器阵列、信号后处理单元和输出数据单元构成。当固定波长的光源进入微环阵列芯片,微环阵列芯片与被测物接触会产生温度变化,其谐振状态也将发生相应改变,从而使芯片输出光强发生改变,探测器阵列将输出光强信号转换为电信号,并输入信号后处理单元进行信号处理。后处理单元建立输入信号与实际温度的直接对应关系并计算实际温度,实现实时温度输出,从而实现高精度温度测量。以下将从光谱传输性能、信号处理方法以及温度响应能力3个方面描述该系统功能。

图4 温度传感系统Fig.4 Temperature sensing system
3.1 级联微环传输性能
对于单频入射激光来说,由于不同微环的谐振位置不同,因而其波长响应也随谐振腔尺寸变化,且由于后续微环受到前置微环分光影响,微环阵列光功率输出随系统顺序呈逐渐下降趋势。第i个环的输出光强公式可表达为[14]:

式中,TPi为through端传输谱,T为drop端传输谱,图5为考虑微环阵列级联因素时,各微环端口实际相对输出光强相对波长的关系,可以看出当微环谐振峰越远离谐振波长时,相对输出光强越小。
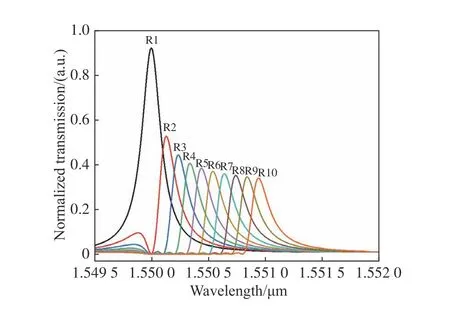
图5 微环阵列实际输出光强与波长的关系Fig.5 Actual output light intensity of micro-ring array varying with wavelength
3.2 信号处理方法
为实现温度传感,需要建立输出信号强度与温度变化的一一映射关系。为建立光强和温度变化的单调关系,需要对微环阵列的各输出进行信号处理。为了使加权求和之后的相对输出电信号强度曲线平滑且单调,后处理单元对各微环输出信号进行加权相加,具体表示为加权系数j为微环编号,n为微环数量,Ij为对应第j个微环探测器转换的电流信号强度。
其结果典型值由图6(a)表示,可见,在温度测量区间5~18 ℃内,输出信号强度与温度呈单调函数关系,可根据输出信号的强度进行温度检测。根据实际用途的不同,在保证低功耗低成本的同时,该系统可以通过分别对级联微环数量、中心谐振波长以及谐振峰半高宽的设计改变温度测量范围以及温度测量分辨率,拥有比较大的设计自由度以及灵活的测量范围。图6(b)(彩图见期刊电子版)显示增加微环数量可以扩展测量范围,温度范围可从10 ℃(@n=10)增加至80 ℃(@n=61),温度测量范围随微环数量的增加而扩大。图6(c)显示通过改变损耗系数,改变微环阵列半径可以对测量结果产生影响,缩小微环半径可使温度测量范围从12 ℃(@R=50 μm)提高至26 ℃(@R=6.25 μm)。通过灵活配置级联阵列参数,增加微环阵列个数至81个,缩小微环阵列半径至6.25 μm,可实现最大温度测量范围,其范围覆盖−20 ℃~105 ℃(如图6(d))。
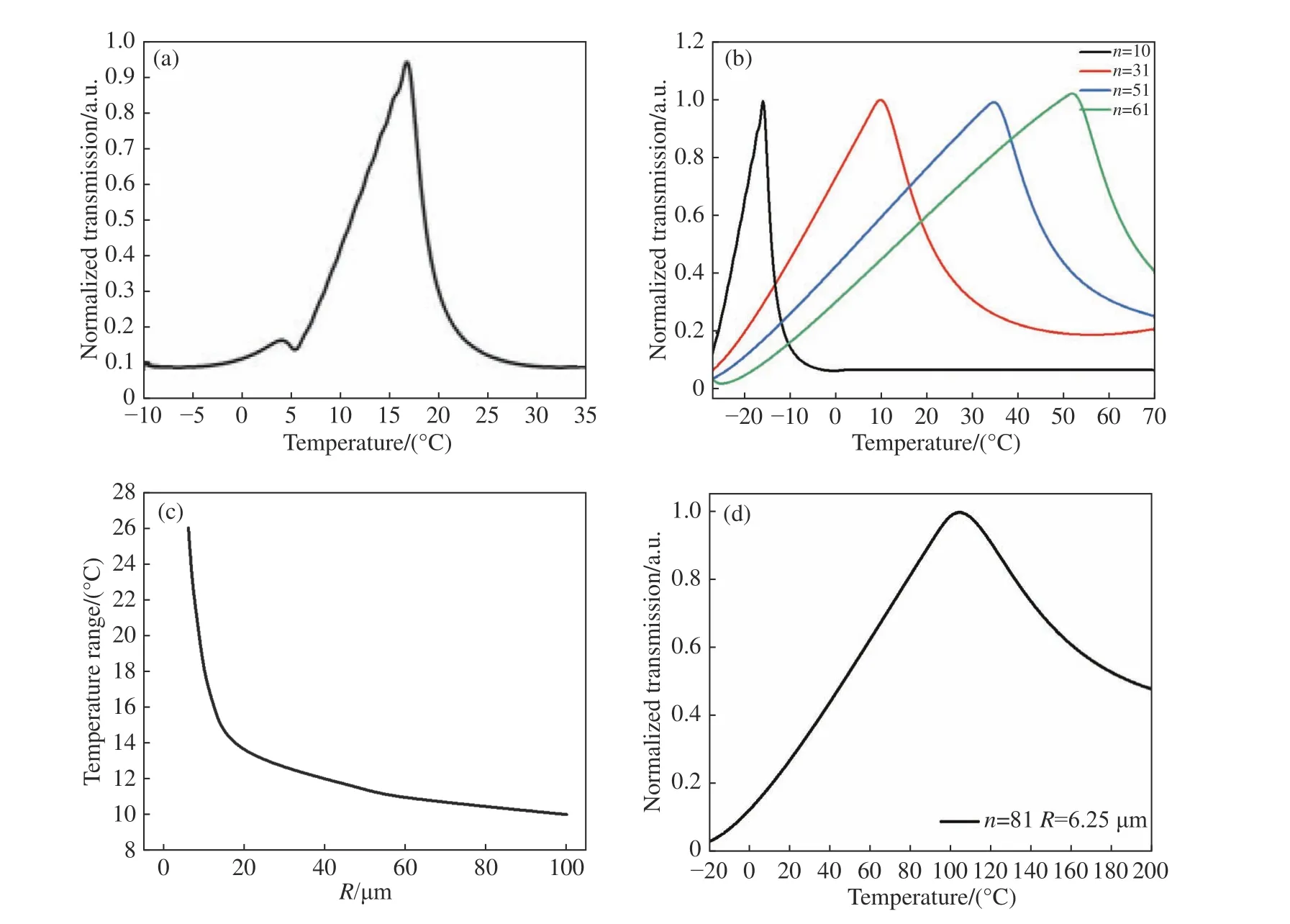
图6 (a)输出信号进行加权求和之后的相对输出电信号强度与实际温度的关系;(b)不同微环数量的微环阵列输出信号加权求和后相对输出电信号强度对应实际温度的关系;(c)微环阵列温度测量范围对应半径的关系;(d)灵活配置级联阵列参数得到最大温度测量范围时输出信号与实际温度的关系Fig.6 (a) Relationship between the relative output signal intensity and the actual temperature after the weighted summation of the output signal; (b) relationship between the relative output signal intensity and the actual temperature after the weighted summation of the output signals of the micro-ring array with different numbers of micro-rings;(c) relationship between the micro-ring array temperature measurement range and the corresponding radius; (d) relationship between the output signal and the actual temperature when the cascade array parameters are configured flexibly to obtain the maximum temperature measurement range
综上所述,微环阵列较单环谐振温度变化范围大,且可以根据实际需要增加微环数量以扩大温度变化范围,较单环更灵活。此外,相比于单个微环结构,该级联微环传感系统输出信号强度随温度变化更趋于线性,使得其在测量范围内传感精度一致性较高。
3.3 温度响应能力
下面将测试温度传感器的温度响应能力。考虑到检测系统测量精度主要受输入光源光强抖动影响,图7为假定光强抖动值为1%的情况下输出信号情况,图7(a)中展示的台阶为对输出信号进行1%光强采样的情况,可以发现采样后信号呈阶梯状,阶梯宽度表示一定范围内的温度分辨率,宽度越长则分辨率越低,由图7(b)分辨率精度的分布(如温度精度为30 mK时的数量占总数的28.91%)可知,大部分温度(>90%)情况下,系统分辨率优于40 mK,最低测量精度为60 mK。相比布拉格光栅温度传感器(@500 mK)和内置FP腔的光子晶体谐振腔(@175 mK)测量精度有所提升[8]。
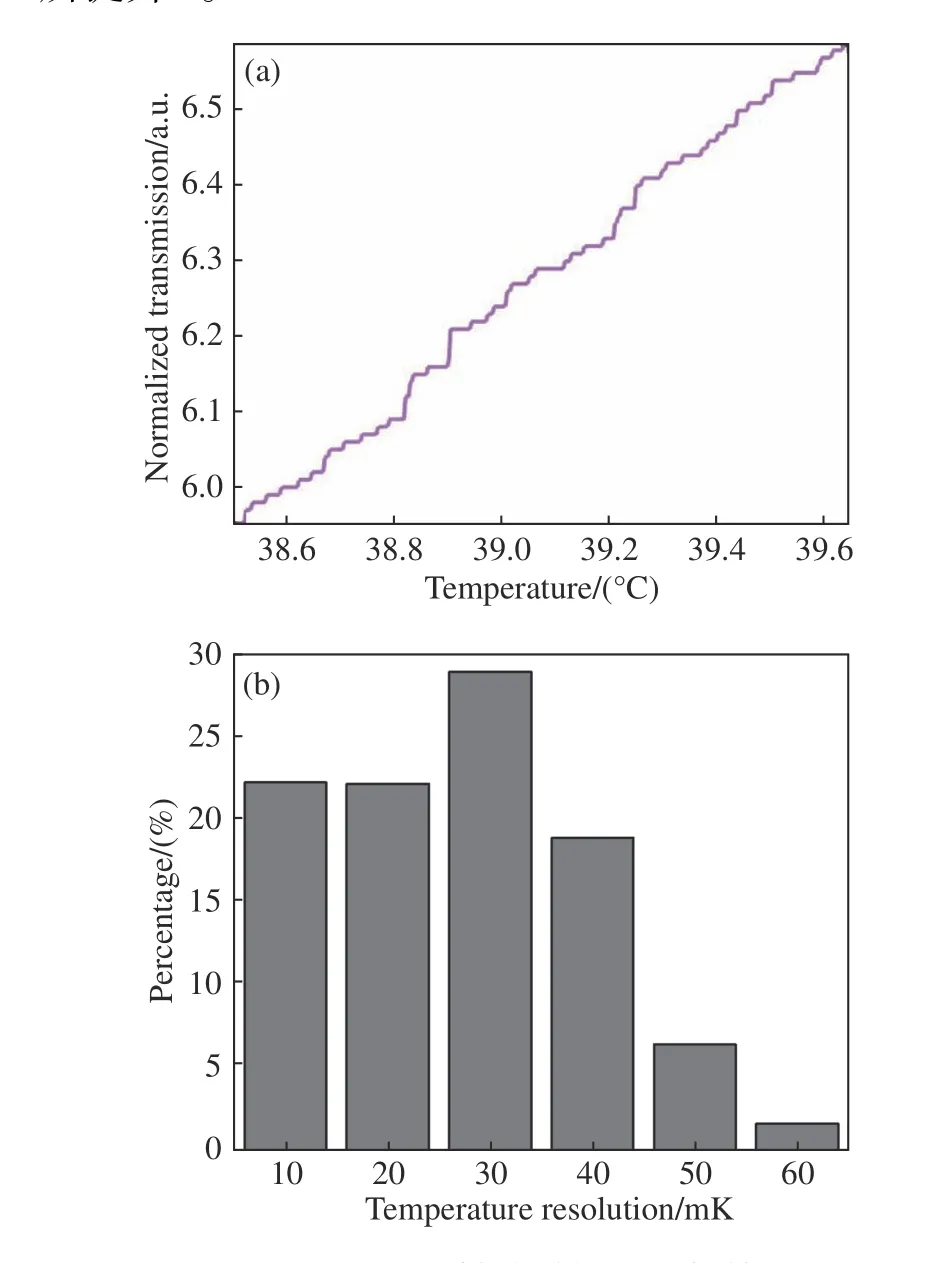
图7 (a)对光源1%光强抖动采样的局部结果;(b)测量精度范围分析Fig.7 (a) Partial result of sampling of 1% light intensity jitter of the light source; (b) analysis of measurement accuracy range
图8显示的是无衬底结构的芯片响应时间与温度变化的关系,芯片为标准的SOI结构,硅波导表面由2 μm的氧化硅包层覆盖。当芯片正面与被测物接触,在短时间(<1 ms)内将被测物理想化为恒温热源,假定芯片的其他接触面采用绝热材料包裹,由图8可知芯片温度从−20 ℃变化至45 ℃的响应时间小于20 μs(~50 kHz),(当温度超过45 ℃,温度差小于1%时响应时间为8.03 μs)。通过进一步降低氧化硅包层厚度或采用更高热导系数的包层材料[15],可以进一步提升响应时间至亚微秒量级。

图8 温度响应速度Fig.8 Temperature response speed
此外,SOI结构硅衬底厚度对测量结果具有较大的影响,由于硅的导热性良好,较厚的硅衬底会导致传感区域温度稳态时间增加,从而降低系统整体的响应速度和精度,因此,在实际应用中,因考虑对SOI基底做减薄或去除后道工艺,以保证器件性能。
4 结论
本文提出了一种简易灵活的单频激光响应集成光学温度测量方案,通过采用硅基集成微环级联阵列芯片方案,降低了传感系统对光源的要求,有效降低了系统成本及功耗。通过灵活配置级联阵列参数,可实现响应范围覆盖−20~105 ℃,响应时间优于20 μs,测量精度优于60 mK的精准快速温度测量。
猜你喜欢
电子制作(2019年12期)2019-07-16
成都信息工程大学学报(2019年1期)2019-05-20
电子制作(2018年12期)2018-08-01
电子制作(2016年15期)2017-01-15
光学精密工程(2016年3期)2016-11-07
系统工程与电子技术(2016年2期)2016-04-16
工业设计(2016年8期)2016-04-16
中国学术期刊文摘(2016年2期)2016-02-13
梧州学院学报(2015年3期)2015-02-28
橡胶工业(2015年4期)2015-02-23
