
河湖水域岸线监管平台应用研究
2021-11-24 08:36颜培胜
中国水利 2021年20期
颜培胜 张 旭 李 强
为运用现代信息技术加强河湖管理,中水北方勘测设计研究有限责任公司研发了河湖水域岸线监管平台,利用大数据、云计算、物联网等技术将水域岸线管理、“四乱”监管和水环境监管等河湖业务有机融合,通过大数据分析河湖现状形态、趋势变化成因,解决河湖精细化管理问题,提高了河湖水域岸线的管理能力和水平。
一、监管平台总体架构
系统逻辑架构基于微服务理念,从数据整合、存储、服务、应用、安全、管理等需求出发,构建开放、标准和安全的河湖水域岸线监管平台。
1.数据存储层
数据存储层主要包含数据库、索引文件、文件存储。数据库采用mysql数据库,文件存储采用分布式横向扩展文件系统glusterFS。
2.应用服务层
应用服务层中包含搜索服务、消息队列服务、微服务框架注册配置中心、缓存服务、持久层服务、分布式文件、调度服务等内容。消息队列服务采用kafka,微服务框架注册配置中心采用nacos,缓存服务使用redis服务,以MyBatis作为持久层服务,搜索服务采用Elasticsearch。
3.WEB层
WEB层中包含WEB服务框架、安全服务等,采用分布式应用服务扩建Spring Cloud Alibaba和Spring Cloud Security。Spring Cloud Alibaba是一种微服务开发的一站式解决方案,添加一些注解和少量配置,就可以迅速搭建分布式应用系统,主要功能包括服务限流降级、服务注册与发现、分布式配置管理消息驱动能力、对象存储、分布式任务调度。Spring Cloud Security是一个开源安全框架,提供身份验证、授权、密码和会话管理,提供WEB安全服务。
4.服务端
服务端包含负载均衡服务、WEB服务、WEB缓存服务。以docker做容器化部署, Nginx+gateWay做负载均衡和url过滤。Nginx+gateWay组成网关是介于客户端和服务器端之间的中间层,所有的外部请求都会先经过网关这一层。也就是说,API 的实现方面更多地考虑业务逻辑,而安全、性能、监控可以交由网关来做,这样既提高业务灵活性又保持安全性。
5.客户端
客户端展示包含前端控件、前端开发框架。前端控件中采用先进的ANT DESIGN,为开发者、设计师和产品经理准备的基于 Vue 2.0 的桌面端组件库。前端开发框架采用JQuery和Vue,建用户界面的渐进式框架。系统总体框架如图1所示。

图1 系统总体框架
二、监管平台建设主要内容
河湖水域岸线监管平台以河湖管理与保护需求为抓手,按照数字孪生的理念,收集地形地貌、江河水系等基础数据,叠加经济社会数据、水利专题数据、水利行业规划成果,接入水文站、雨量站、水质站、视频站等实时监测数据,构建河湖数字化场景。平台功能包括河湖长制管理、水域岸线管理、涉河项目管理、河道采砂监管、水生态环境监管、河湖“四乱”监测6个一级应用,河长工作台、河长一张图、巡河管理、台账管理、岸线信息管理、涉河项目管理、河湖监测、水形势分析等32个二级应用。功能框架见图2。
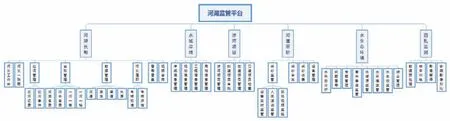
图2 功能框架
三、监管平台建设特色
1.水域岸线规划
水域岸线规划涉及防洪岸线、河道管理范围线以及生态保护蓝线,对于三条线的界定工作,需要根据河道的具体防洪标准,采集河道断面及基础测绘成果以及水文观测资料等相关数据,依据水文计算方式推演防洪岸线的位置,进而界定管理范围线和生态保护蓝线。当河道(湖泊)发生改道、冲淤等情况时,河道岸线也会发生变化。本项目对水域岸线情况采用宏观监测以及变化河段重点监测相结合的方法,实现水域岸线的精确划定。
(1)全局监测
在获取河湖管理区优于1m分辨率遥感影像的基础上,进行多景数据几何校正、镶嵌和匀色等数据预处理,利用水边线自动提取工具对预处理后的影像进行计算分析,提取出河湖成像瞬时水边线,对自动生成的水边线进行人工检查和部分修编后,提取河湖岸线。通过多期数据的对比分析,提取发生变化的河段,分析河道发生变化的原因,并进行必要的人工核查,划定重点监测河段区域。
(2)重点河段的岸线监测
基于卫星影像划定的重点河段区域,采用航空平台搭载成像相机和机载LIDAR的方式,获取重点河段的河道基础地形数据和地物分布情况,结合水文观测数据和水文分析计算重新划定河道岸线,实现河湖岸线的周期性精准动态监管。水域岸线规划示意见图3。

图3 水域岸线规划示意
2.“四乱”人工智能判别
本项目采用卫星遥感人机交互监测和人工智能判别相结合的方式开展“四乱”监管工作。遥感监测具有宏观性和周期性的特点,结合人工智能深度学习技术,则可以实现“四乱”信息的智能解译和提取,大量的信息采集工作将由计算机来高效完成,利用前沿的信息化技术对河湖“四乱”问题进行调查取证,可以在确保准确率和及时性的前提下,很大程度上节省人力物力成本,强化相关部门对监测区域内的“四乱”监管。
(1)卫星遥感影像“四乱”判别
首先,收集监测区域范围内多时相、高空间分辨率的卫星遥感影像数据;然后,对遥感影像进行正射校正、影像融合和影像增强等处理,得到卫星遥感正射影像;以卫星遥感正射影像为基础,按照“全面观察、综合分析”的原则,对疑似“四乱”进行预判读,建立解译标志并圈定疑似“四乱”位置并定义类型;最后,根据疑似“四乱”解译判读结果,对重点调查区域利用无人机拍摄的方式进行实地核查,在核查过程中,采集“四乱”照片、位置信息等数据,确定“四乱”相关信息。
(2)人工智能“四乱”判别
对于收集到的遥感影像,采用遥感技术和计算机技术相结合的数据处理方法进行处理以得到高质量的数据,并录入数据库;改进较为流行的图像语义分割算法(UNet算法、DeepLabV3+算法等)解决遥感领域的影像解译问题,由此得到多个算法模型;将待解译影像输入模型中进行测试,输出解译结果;对结果进行手工判读,手动对不合格的解译结果进行修改,更新得到高质量解译结果,一方面,该结果作为最终成果输出;另一方面,该结果入库,补充更新数据库。如此不断迭代,反复进行,最终得到较为完善的模型。
基于人工智能的“四乱”判别,“乱建”提取准确率基本可以达到80%左右;“乱采”识别目前还处在探索研究阶段,在保证样本标签数据量情况下,内测结果表明采砂现象识别率可以稳定在80%左右,其找全率和准确率已经达到一个相对高的精度。
3.“点、线、面”全方位水质监测
本项目以卫星遥感、无人船、近地定点遥感技术相结合的方式从“点、线、面”三个维度开展水质监测工作。卫星遥感从宏观层面定期整体把握监测区域水质情况;无人船定期获取水域岸线水质数据,进行水质监测,重点把握陆水接合地带水质情况;近地定点遥感主要对较容易发生水质变化的重点小区域进行长期不间断的水质监测,保证随时可以掌握其水质情况。
(1)卫星遥感水质监测
卫星遥感水质监测主要包括多源遥感影像收集、水样采集、遥感影像处理、水质参数反演四部分内容。首先,定期收集多源遥感影像,例如TM、MODIS、GF1、GF2等具有多波段且可以用作水质分析的卫星遥感数据。其次,对收集的遥感影像进行辐射校正、大气校正、几何校正、水边界提取等数据处理。再在监测水域中采集典型水体水样,并做化学分析和光谱曲线测量,根据影像和光谱测量数据建立水质参数反演模型。最后,根据水质参数反演模型进行水库水质反演,反演出叶绿素a、悬浮物、总氮和总磷、氨氮、COD浓度,并解译出水葫芦、蓝藻等水生生物的空间分布情况。
(2)无人船水质监测
无人船水质监测主要包括航路规划、水质数据采集、水质数据处理三部分内容。数据采集前开展踏勘工作,然后使用无人船集控软件进行航路设计。航路设计工作就绪后,利用无人船搭载水质监测仪器进行水质数据获取,无人船按照预设航路可以快速采集水陆结合带水质数据。数据采集后,再通过无人船集控软件自动进行水质数据处理,快速反应调查区域水质情况。
(3)近地遥感水质监测
本项目采用固定水域原位光谱水质在线监测仪对重点监测区域进行水质实时、连续监测。固定水域原位光谱水质在线监测仪基于水体要素与水体遥感反射率之间的关系,结合生物光学模型,通过采集水体的遥感反射率数据,运用反演模型同时测定多个水质参数。近地遥感水质监测主要包括安装部署仪器、远程实时监测、远程数据传输、水质反演4部分组成。水质监测示意见图4。

图4 水质监测示意图(悬浮物浓度)
四、结语
通过河湖水域岸线监管平台的建设,整合了水域岸线管理、“四乱”监管和水环境监管等业务的基础数据,为管理部门之间的数据共享、深度挖掘、决策分析提供了有力支持。监管平台的建设使用,最大限度地发挥了跨业务部门不同类型数据之间的交互作用,提高了水域岸线监管的准确性和时效性,实现了水域岸线管理工作的精细化管理,为实现“河畅、水清、岸绿、湖净、景美”的美好愿景提供现代化的技术支撑。