SRH系列轻量型机器人手腕模组单元的研发
2021-11-18 06:42陆学斌
科学与生活 2021年20期
陆学斌
摘要:手腕模组单元安装于机器人关节处,是机器人工作的核心模块之一。论文重点阐述了SRH系列轻量型机器人手腕模组单元内部气路优化、手腕结构优化、限位模块单元及液压缓冲器设计过程。SRH系列轻量型机器人手腕模组单元不仅提高了机器人关节连接精度,增加了手腕结构的稳定性,而且还具有结构简单,成本低廉等诸多特点。
关键词:机器人;轻量型;手腕;模组单元;优化;结构简单 1研究背景
2010 年,德国技术科学院(ACDTECH)等机构联合提出“第四代工业—Industry4.0”战略,旨在实现制造的智能化、绿色化、人性化、分散网络化和信息物理的深度融合。我国也于2015 年发布了第一个十年行动纲要“中国制造 2025”。该纲要中明确提出将机器人作为技术发展的重点领域,加紧抢占技术发展的战略制高点。将工业与信息深度相融合,利用网络化、数字化、智能化等技术,推动整个传统产业的技术创新。
模块化关节是模块化机器人的关键组成部分,其性能的好坏直接影响机器人的性能,因此对它的研究也倍受关注。本课题重点研究机器人手腕模组单元,主要從以下四个方面开展工作:手腕模块内部气路优化设计、手腕模块结构优化设计、设计限位模块单元,设计液压缓冲器。
2设计内容
(1)结构优化设计
机器人末端执行器的重量、被抓取物体的重量及操作力的总和机器人容许的负荷力。因此,要求机器人末端执行器体积小、重量轻、结构紧凑。在手腕模组结构符合性能要求且设置某些约束旳条件下,可以修改一些能够被修改的设计变量,让该手腕结构的性能符合最佳的值。借助CAE软件对该手腕模组单元进行参数化建模;对结构参数化模型进行加载与求解;提取约束条件和目标函数,借助优化处理器完成优化参数评估;优化处理器参照此次循环获取的优化参数、设计变量和状态变量,对比目标函数和上次循环获取的优化参数,判断此次循环目标函数有没有为最小,或结构有没有最佳。假设最佳,结束迭代和优化循环,反之继续;参照结束的优化循环及现在优化变量的状态,改变设计变量,再次进行循环。
利用Adams软件对该手腕模组结构进行建模,在建模时对某些细小结构进行简化,设计其模型;仿真模拟其动作,完成模型的测试;进行模型的细化,确定设计变量及目标函数;进行设计的优化,获取最佳性能时的设计参数。最终使手腕结构紧凑,轻便。
(2)内部气路优化设计
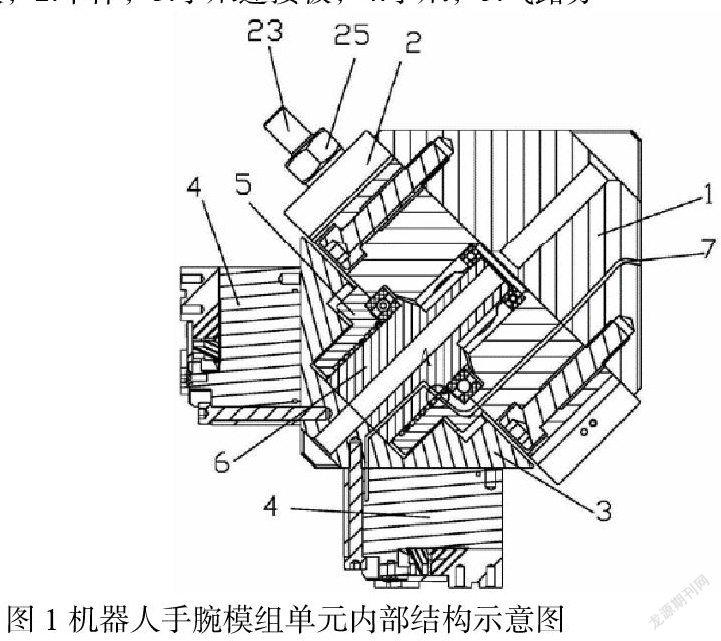
在对气动机械手的结构进行设计前,本课题成员首先对企业的实际情况和控制要求加以明确,在此基础上开展设计工作,通过调研和研究该手腕的安装于机器人手臂和抓手的工作环境,选择气压驱动方式来驱动控制。气压驱动的特点是空气来源方便清洁,成本较低,动作迅速,快速性好,可实现位置或者速度控制,结构简单,具有缓冲作用。此外,气动控制装置还具有对工作环境要求不高、噪声小和无油污的优点。气动控制回路主要用于控制机器人腕关节末端执行器的夹具姿态,包括动力输出盘和回转供气装置,动力输出盘具有输气通道,用于向机器人腕关节末端执行器输送气体;回转供气装置包括回转供气轴和压缩气源输入口,在回转供气轴的侧壁上开设有供气口,压缩气源输入口与供气口连接,在手腕模块的内部设置有供气气路,供气气路的一端与供气口连通、供气气路的另一端与输气通道连通。传统机构中,手爪模块的气管线需要从外部引出。这样一来,手爪模块在旋转的过程中会使手爪模块的气管线缠绕,断裂。本次设计将在贯通转轴打孔形成气道的技术,从而将气由转轴输送至手爪模块上,避免了气管线缠绕和断裂,同时也避免了在转轴上开设贯通的气道,对转轴造成的影响,使得加工更加简单,节省了零部件,结构更加简单,并且运行可靠,有利于手爪机构的小型化。手腕模组单元内部结构示意图如图1所示(图中给出一个连通的气道示意,其他气道未画出)。其中:1.手腕连接板,2.本体,3.手爪连接板,4.手爪,5.气路分
(3)设计限位模块单元,保证定位精度
手腕内部设有限位开关用于检测到位及保护功能,通过调整位置,实现不同的位置的限位保护。在手腕模块内部设有位置传感器和电磁阀,位置传感器和电磁阀连接,位置传感器与位置指示灯连接本机械手的非接触式近接开关选择磁性限位开关,在气缸活塞上安装永久磁环,在缸筒外壳上装有舌簧开关,开关内装有舌簧片。当装有永久磁铁的活塞运动到舌簧片附近时,磁力线通过舌簧片使其磁化,两个舌簧片被吸引接触,则开关接通。当永久磁铁返回离开时,磁场减弱,两舌簧片弹开则开关断开。该模块设计定位精度达到0.05度,能够满足高精度机床上下料要求。
(4)液压缓冲器设计
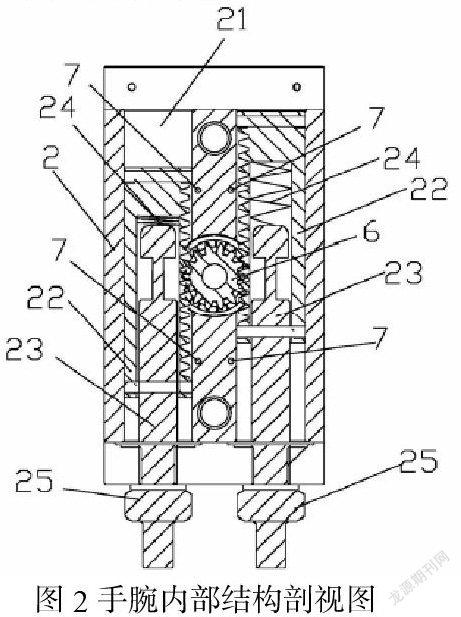
手腕结构内部设计有缓冲腔体,缓冲腔体内设置有套筒和设置在套筒内的缓冲机构,套筒与缓冲腔体滑动连接,套筒和转轴上设置有相啮合的齿,手腕结构一端设置有与缓冲腔体连通的液压孔,缓冲机构一端伸出手腕结构,并与手腕固定连接,另一端通过弹性部件与套筒底部连接。传统缓冲结构不耐用,当冲击力以及冲击频率太大时,普通缓冲结构会损失扭矩,设计的此种设置先由弹性部件吸收开始的冲击力,然后弹性部件恢复形状,将弹性部件的弹力转驾到套筒上,以减少冲击对缓冲结构的直接损伤,提高使用寿命。缓冲机构伸出手腕的一端设置有螺纹,缓冲机构通过螺母与所述手腕结构固定连接。缓冲机构在工作时固定不动,套筒在液压作用下往复运动,缓冲机构通过弹性部件与套筒之间的相互作用,通过调节螺母能够调节缓冲机构伸入套筒内的长度,从而根据实际需要调整弹性部件与套筒之间的预紧力。该弹性部件为弹簧。缓冲腔体数量为两个,两个缓冲腔体内的套筒运动方向相反。利用两个套筒带动转轴转动,转动稳定,实现转轴的正转和反转从而带动手爪连接板的往复转动。
手腕内部结构剖视图如图2所示,1.手腕连接板,2 .本体,6 .转轴,7 .气道,21 .缓冲腔体,22 .套筒,23 .缓冲机构,24 .弹性部件,25 .螺母,3 .手爪连接板,4 .手爪,5 .气路分流块,51 .气槽,52 .密封圈。
3 结论
研发的SRH轻量型机器人手腕模组单元,在满足功能的前提下对其结构进行优化设计,保证在满足功能的前提下,使重量最轻。成果不但能够为国产腕关节的产业化奠定了坚实的基础,同时该研究成果亦可运用于将来腕关节的批量生产,该成果解决了腕关节设计应用中的关键技术。
作为工业机器人的末端执行部分, SRH系列轻量型机器人手腕模组单元的研发不仅填补国内技术空白,而且在技术指标和功能实现上媲美国际中高端水平,更对产品的系列化设计和进一步的优化设计提供了依据。
综上所述,该成果解决了机器人末端执行件的关键技术,填补了国内该技术领域的技术空白,具有明显的社会效益。
参考文献
[1] 邓仲良,屈小博.工业机器人发展与制造业转型升级——基于中国工业机器人使用的调查[J].改革,2021.
[2] 张余龙,邱夏东,胡晓靖等.智能物料搬运机器人结构设计[J].中小企业管理与科技,2021(22):185-186.
[3] 廖能解,马平,欧建国等.上下料桁架机器人控制系统设计[J].机械设计与制造,2020(12):171-175.
[4] 张新予,匡以顺.一种桁架机器人的机构设计及实现[J].装备制造技术,2008(7):57-58.(5):7-14
[5] 强恒存,沈惠平,张有斌等.一种双手爪摆动机械手传动机构及优化设计[J].常州大学学报:自然科学版,2017,29(4):50-56.
[6] 陈维范,薛丹.内置式机械手柔性加工单元的设计[J].制造业自动化,2021,43(2):28-30.
猜你喜欢
装备维修技术(2021年20期)2021-03-29
写真地理(2020年34期)2020-11-16
通信产业报(2020年31期)2020-09-10
小资CHIC!ELEGANCE(2019年1期)2019-06-11
中国建筑金属结构(2018年6期)2018-08-31
中国计算机报(2018年50期)2018-02-23
优雅(2017年3期)2017-03-09
幼儿教育·教育教学版(2016年5期)2016-09-30
电脑爱好者(2016年8期)2016-04-28
恋爱婚姻家庭·养生版(2015年9期)2015-05-14