基于RFID 传感和DBN 的人体活动识别技术研究∗
2021-11-13 08:25:00邓芳明
电子器件 2021年5期
阳 丽,邓芳明
(1.萍乡学院信息与计算机工程学院,江西 萍乡 337000;2.华东交通大学电气与自动化工程学院,江西 南昌 330013)
随着人工智能的发展和可穿戴传感器设备的普及,基于深度学习的人体活动识别(human activity recognition,HAR)得到了广泛关注,且具有巨大的应用价值[1]。例如,智能人体活动识别系统可以持续对家中的老年人或身体受损的人进行健康监测[2-4]。因此,准确地识别和记录人体的活动姿态,能够为人们提供更为精确的服务,利用传感器数据特点提取具有良好判别力的特征以提高基于传感器数据的HAR 准确率具有重要的意义。
当前主流的无线传感技术主要包含蓝牙(Bluetooth)、ZigBee 和无线局域网(WLAN)三种技术。这些无线技术易于构建无线传感器网络(WSN),适用于故障诊断和环境监测[5-6]。然而它们都存在操作复杂度高、功耗高的缺点,必须采用电池或直流电源供电。这些具有辅助电源的无线传感器不仅成本高,而且受限于电池寿命,不适合应用于长期监测中[7]。当前无源无线传感器技术主要包含声表面波(SAW)技术和射频识别(RFID)技术两大类。SAW 无线传感器利用声表面波完成传感信号的采集,具有耐受恶劣环境(高、低温和射线辐照)的特点,但制作复杂且成本高,主要应用于电力系统等复杂环境监测领域[7]。RFID 技术利用射频信号通过空间耦合实现非接触信息传递,并通过所传递的信息达到识别目的。相比于现有的WSN 节点技术,基于超高射频RFID 技术的传感标签无线传输距离短,速率低,但得益于反向散射调制技术的采用,电路结构简单,功耗低,适合工作于无源状态[8-9]。
人类活动识别特征提取方法包括传统特征提取和深度学习特征表达两种方法[10]。传统方法需人工对划分的数据抽取统计学意义特征向量,包括时域特征、频域特征以及其他特征向量。但是传统方法所抽取的特征都是浅层的,且需要专业的人体动作领域知识来进行特征提取。而深度学习技术可以直接从原始数据自动地抽取更复杂的深层的特征,无需人工干预;同时,深度学习可以有效地解决类内差异和类间相似的问题。深度学习方法可以从传感器信号中提取出具有代表性或最优的特征,而无需事先从传感器信号中学习,然后将这些特征输入到人类活动识别工作中[11]。
目前的深度学习算法可以分为四个体系:有监督的卷积神经网络(CNN)、基于自编码(AutoEncoder)的深度神经网络、基于限制玻尔兹曼机(Restricted Boltzmann machine,RBM)的深度置信网络(Deep belief networks,DBN)和基于递归神经网络(Recurrent neural network,RNN)的深度神经网络[12-16]。其中,深度置信网络已经被应用于许多复杂的模式识别问题中,包括语音识别、图像和视频处理和分类。适当地配置DBN 可获得其最优性能。DBN 配置需要对超参数和DBN 结构进行适当的设置,DBN 超参数包括小批量的大小、权值的初始设置、周期数、学习速率、动量以及隐藏层和单元数。在训练数据不足的情况下,超参数的设置是至关重要的。因此,DBN性能可能会有所不同,并且可以根据配置降低。
为了提高人体活动识别精度,使其具有更好的鲁棒性,本文提出了一种基于RFID 传感和DBN 最优结构人体活动识别技术。首先,设计了一种无源RFID 传感标签,人体加速度信号存入传感器数据区,标签序列号和硬件版本组成了标签ID,可以进行唯一标识。在使用DBN 进行训练之前,使用滑动窗口技术从传感器数据中降低高维特征的维数。从原始的人体传感器数据中提取重要的初始特征。然后,采用核主成分分析(KPCA)和线性判别分析(LDA)对特征进行进一步处理,使其更具鲁棒性。最后,利用这些特征训练DBN。通过在真实可穿戴传感器数据集上实验。
1 人体行为识别结构
如图1 所示,为设计的人体行为识别结构。在该结构中,RFID 传感标签用于采集人体行为加速度信号,并对其归一化,形成训练集和测试集。训练集用于训练DBN 网络,完成训练的DBN 网络通过测试集进行测试。

图1 人体行为识别结构流程图
2 RFID 传感标签设计
2.1 RFID 传感标签结构设计
现有RFID 通信协议ISO18000-6C[17]并没有规定RFID 标签如何实现传感功能,因此加速度信号可以写入RFID 标签ID 信息内容。如图2 所示为本文所制定的RFID 标签传感信息方案,标签96 bit ID 信息在逻辑上分为3 个区域:标签类型区(8 bit)、传感器数据区(64 bit)和标签ID 区(24 bit)。每段可以自定义数据位数,标签类型用于识别标签的类型和功能;加速度信号存入传感器数据区,可以根据实际需求加入相应的传感器信息;标签序列号和硬件版本组成了标签ID,RFID 传感标签可以使用此标签ID 进行唯一标识。
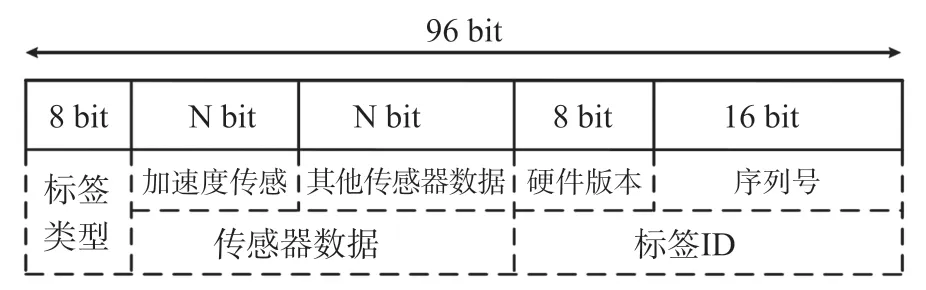
图2 所设计的RFID 传感标签ID 方案
图3 是RFID 传感标签结构图,传感标签由通信模块、电源管理模块和数字模块组成。通信模块由通信天线和RFID 通信芯片组成,它负责完成传感标签信号的发送、接收以及调制和解调的功能;电源管理模块由取能天线、匹配网络、倍压整流电路和稳压电路构成,它负责为传感标签的正常工作提供电源电压;数字模块由微控制单元(Micro-controller unit,MCU)和加速度传感器组构成,MCU 用于控制整个传感标签的工作并符合相应的RFID 通信协议,加速度传感器用于采集人体活动信号并完成相应数据的数字转换。MCU、加速度传感器和RFID 通信芯片之间的通信由I2C 总线连接控制。

图3 本文采用的RFID 传感标签结构图
根据Friis 公式,RFID 传感标签的工作功率可以表达为[18]:
式中:Er(W)表示阅读器发射功率,Ga表示标签天线增益,ηr表示标签电源管理模块的转换效率,d(m)为标签的工作距离,λ(m)为电磁波波长。标签的工作距离是RFID 系统最重要的性能指标,根据式(1),标签的工作距离d又可以表达为:

通常情况下,阅读器发射功率Er受到相应国家和组织的限制(例如我国和欧洲最大为2 W,北美最大为4 W),标签天线增益Ga有限(例如典型偶极子天线增益为1.64)。所以由式(2)可以得到:传感标签的低功耗设计和电源管理的高效率设计在标签设计中占有重要地位。
2.2 RFID 传感标签电路设计
电源管理模块是RFID 传感标签的关键模块。如图4 所示,本文设计的电源管理模块包含匹配网络、倍压整流电路和稳压电路三部分。匹配网络用于完成取能天线和倍压整流电路间的功率匹配,从而达到天线接收信号功率的最大化;倍压整流电路用于将天线接收的射频信号转换为直流电压信号;由于输入射频信号的不稳定,稳压电路用于将倍压整流电路输出的直流信号转换为一稳定直流电压,为电流传感标签其他模块供电。匹配网络采用了L型匹配网络,其中电容C1是高品质因数瓷介微调电容器,电感L1为高品质因数射频电感,通过调节C1数值实现最大能量传输效率。
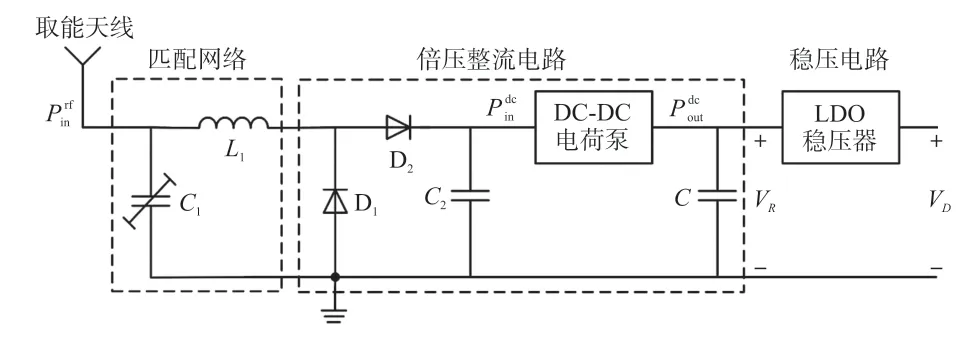
图4 本文设计的电源管理模块
倍压整流电路由单级整流电路和直流-直流(DC-DC)电荷泵构成。单级整流电路的内部结构有整流二极管D1、D2,同时还有电容C2,它负责将输入射频信号转换为直流信号;由于整流电路的整流效率主要由整流二极管的阈值电压决定[19],因此本设计采用了零偏置电压的肖特基二极管SMS7630。不同于传统的多级升压整流电路[20],本设计在单级整流电路后采用了高转换效率的低压DC-DC 电荷泵芯片S-882Z24;S-882Z24 采用全耗尽绝缘体上硅(Silicon On Insulator,SOI)工艺,最低输入电压可低至0.3 V。当负载电容C的输出电压VR充电升高至VRH=2.4 V 时,S-882Z24 内的管理电路自动给后面的稳压电路放电,从而激活标签数字模块;当负载电容C的输出电压VR放电降低至VRL=1.85 V 时,S-882Z24 断开输出回路并开始新的充电过程。
取能天线采用常用的鞭状天线,而通信天线采用微带贴片天线设计,有利于应用于电网多金属环境中。所采用的射频芯片为英频杰公司的Monza X-8K,它是一款符合EPC G2 和ISO18000-6C 通信标准的RFID 芯片,内部集成了8 192 bit 非易失性存储器(Nonvolatile Memory,NVM) 和I2C 总线。MCU 型号选用德州仪器MSP430FR6964,最低工作电压为1.8 V,最高工作频率为62 MHz,最低功耗为118 μA/MHz,能够提供256 kB 的磁性随机存取存储器和8 kB 的静态随机存储以及20 个12 bit 模数转换(Analog-Digital Converter,ADC)通道。
3 最优DBN 结构
本文提出的系统由传感器数据采集、降维特征提取和人体活动识别三大部分组成。如图5 所示为人体活动识别选择最优DBN(Optimal DBN,ODBN)结构的方法的工作流程。
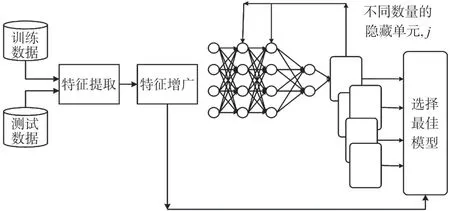
图5 人体活动识别的新方法
3.1 传感器数据采集
传感器数据来源于人体活动相关的加速度传感器。本文考虑加速度计和陀螺仪的传感器数据,在去除噪声和对传感器信号进行统计分析后,进行特征提取,降低特征的维数。系统最后一部分利用机器人特征训练DBN,找到ODBN 结构,以提高人类活动识别的精度。
3.2 特征提取与降维
为了从人体传感器信号中获得鲁棒特征,根据现有特征提取方法,采用滑动窗口技术。窗口的均值¯w根据下式求得:
式中:wi表示i时刻的幅度值,N表示滑动窗口的窗口数。滑动窗口的标准差如下:
滑动窗口的平均绝对偏差如下:

固定长度滑动窗口中的最大值和最小值如下:

滑动窗口的偏斜频率如下:

式中:s表示频率偏度,K表示频率峰度,σ表示标准差,f表示采集加速信号的频率,¯f表示频率均值。
滑动窗口中的最大频率表示为:

滑动窗口中的平均能量解析为:

三个背对背窗口的信号幅度区域(SMA)解析为:
滑动窗口的信息熵表示为:
式中:t表示滑动窗口的信息熵,ci表示当滑动窗口幅度值为wi时的概率。
窗口中的四分位范围根据中间值进行解析,如下所示:

窗口的自回归(AR)系数为:

式中:W(t)是时间序列信号,α表示AR 系数,ε(t)被视为噪声项,p表示滤波器阶数。现在,两个窗口w1和w2的皮尔逊相关系数描述如下:

式中:Cov(w1,w2)表示二者的协方差。
然后,频率信号加权平均值确定为:
频带[x,y]的能量S表示为:

式中:[x,y]表示带宽范围,fi表示为i时刻信号频率。
在这一点上,一个中心矢量和三个连续窗口的平均值之间的夹角为:

3.3 DBN 训练与活动检测
DBN 中增强特性作为可视层输入。隐藏单位被认为是低数量。每个受限玻尔兹曼机(RBM)层分别使用图6 所示的对比发散算法进行训练,如下式所示。

图6 RBM 训练过程
RBM 层形成一个生成模型,其中可见和隐藏单元(v,h)的能量如下:

网络权重更新如下式(21):

式中:ε<0 是学习率。
训练程序从一组特定的隐藏层和单元开始,然后增加一些隐藏单元,重新训练DBN。该过程将持续一定次数的迭代。根据特定DBN 结构的最高精度选择最佳模型。
4 仿真结果与分析
4.1 RFID 传感标签测试
首先在实验室环境下验证所设计的无源RFID传感标签的通信和传感性能。利用JX 仪器公司的专用RFID 性能测试仪JX-R1200 对所提出的无源RFID 传感器标签的通信性能进行了测试。如图7所示显示了测量数据流,所设计的RFID 传感器标签符合ISO18000-6C 的RFID 协议,而且从图7 中还可从测量到的EPC 消息中区分出唯一的ID,这证明了所提出的RFID 传感器的快速识别能力。

图7 RFID 测试仪测量信息
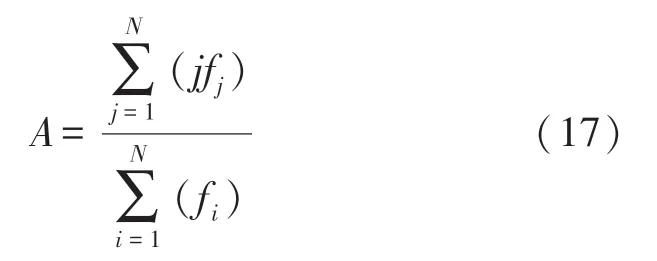
所测得的反射系数和所提出的RFID 传感器标签的灵敏度如图8 所示。测得的天线中心频率为915 MHz,对应的回波损耗S11为-26 dB,符合ISO18000-6C 协议中S11在中心频率处的值应低于-10 dB。标签灵敏度是指能够激活标签的最小接收信号功率。从图8 可以看出,感应标签的最小灵敏度为-15 dBm,对应2 W 读卡器功率的最大工作距离为8.5 m。
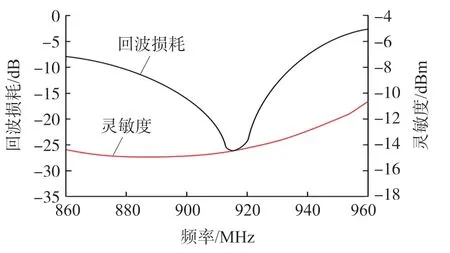
图8 实测反射系数和灵敏度
4.2 算法分析
如图9 所示,通过RFID 传感标签采集加速度等信号,并建立数据集,包括12 个行为:站着、坐着、走着、躺着、站着-坐着、上楼、下楼、坐着-躺着、坐着-站着、躺着-坐着、躺着-站着、站着-躺着。其中7 767 组数据用于训练,3 162 组数据用于测试。在数据库中,用于训练和测试独特动作的测试数量并不是均匀分布的。

图9 RFID 传感标签采集加速度信号
首先从第1 层和第2 层的10 个隐藏单元开始构建网络结构,然后将隐藏单元的数量增加到860个。在表1 中,DBN 结构序列号1 到16,代表16 种不同结构,两个隐藏层的单元数与列1 和列2 中提到的相同。其余结构的第1 层和第2 层具有不同数量的隐藏单元。其中动量为0.7,学习率为2,批量大小为881。表1 中DBN 结构为DBN-16 的RBM层重建误差如图10 所示。结果表明,重构误差随着重建次数的增加而急剧下降。

图10 RMB 层重建误差
表1 DBN 中第1 层和第2 层的隐藏单元数及对应的精度
将训练后DBN 的权值矩阵作为神经网络初始权值,其中人工神经网络(Artificial Neural Network,ANN)输出与活动类型数保持一致,利用最优双曲型激活函数的反向传播训练算法对神经网络进行训练。神经网络各层次学习率的标度因子为1,学习率为2,动量为0.5。根据表1 可知,网络结构为DBN-16 的训练错误率如图11 所示。结果表明,误差率随迭代次数的增加而减小。
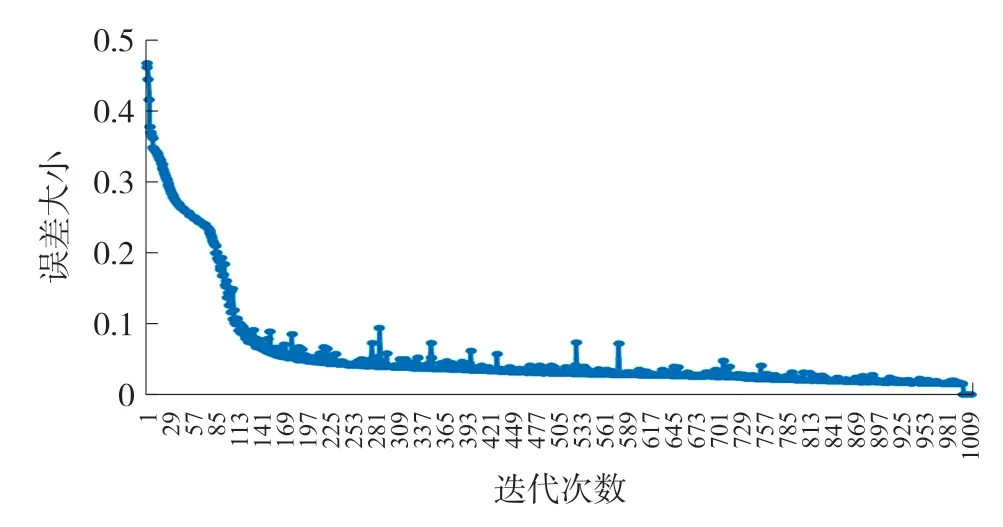
图11 表1 的DBN 结构-16 网络训练的误差率
表1 和图12 给出了不同DBN 结构的测试集的精度。从图11 中可知,随着隐藏单元数量的增加,精确度增加。精度的增加一直持续到第1 层和第2层的隐藏单元数为40,随后准确度降低。当隐藏单位增加到260,之后增加到860 时,精度显著降低并几乎为零。由结果可知,对于这种人类活动识别,DBN 的最佳结构是两个隐藏层的40 个隐藏单元。

图12 不同DBN 结构的精度
表1 中DBN 结构为DBN-16 对应的混淆矩阵(40 个隐藏单元)见表3,错误率见表2。由表2 可知,从坐姿到站立姿势的错误率非常高。由于在训练数据集中的训练实例数量较少,因此,它在DBN中没有被正确地建模。

表2 训练数据中不同类型的活动及其识别错误率

表3 DBN 结构的混淆矩阵-16
精度测试与标准分类器支持向量机(SVM)进行了比较。在本文提出的方法中,支持向量机达到94.12%的准确率,而40 个隐藏单元的DBN 达到97.5%的准确率,是目前数据集的最高准确率。分析结果表明,DBN和ANN 分类器的结构对DBN 的性能有很大的影响。因此,本文提出方法的得到了实验验证。
5 结论
本文研究了一种基于RFID 传感标签和深度信念网络的人体活动识别算法。首先设计了一种无源RFID 标签,获取人体加速度信号,而且此标签还可以进行唯一标识。然后描述了如何从传感器信号中提取鲁棒特征并利用它们训练DBN。文中还讨论了如何通过改变DBN 结构的超参数来寻找ODBN 结构。实验结果表明,所设计的传感标签最小灵敏度约为-17 dBm,对应在2 W 的阅读器功率下传感标签最大工作距离为10.5 m;与传统的支持向量机方法相比,本文提出的DBN 方法具有明显的优越性。所提出的方法获得的总体精度为97.5%,在相同的数据集中也优于其他现有的DBN。
猜你喜欢
传感技术学报(2022年7期)2022-10-19 03:04:20
今日农业(2022年15期)2022-09-20 06:54:16
小哥白尼(趣味科学)(2022年1期)2022-04-26 14:21:08
大科技·百科新说(2021年10期)2021-12-31 07:24:02
基层中医药(2021年5期)2021-07-31 07:58:34
电子制作(2018年23期)2018-12-26 01:01:26
车迷(2018年11期)2018-08-30 03:20:32
特别健康(2018年3期)2018-07-04 00:40:10
海峡姐妹(2018年3期)2018-05-09 08:21:02
公民与法治(2016年10期)2016-05-17 04:12:58