
浅谈无人机在矿山地质灾害中应用
2021-11-12 15:06:48李建锋
中国金属通报 2021年13期
李建锋
(甘肃煤田地质局一四九队,甘肃 兰州 730000)
矿山是地质结构、地形、地貌与地势均十分复杂的地区,由于矿山地区的基础交通设施相对滞后,并且,地区气候变化较为极端,导致矿区常出现大型地质灾害。而随着相关地质勘查工作的深入,发现矿区灾害会在很大程度上干预人类的正常生活行为,甚至会对市场经济建设造成负面影响[1]。因此,如何使用现代化高新技术,对矿山地质灾害进行测绘、预测等工作,成为了矿区工作者的关注热点。无人机在此时被提出,此种高空自动监测设备又被称为“无人驾驶飞机”,在实际应用中,使用无线电与终端网络对其进行连接,并在遥控设备的支撑上,对无人机的飞行进行远程操控。同时,无人机上集成了无线通信装置,它可以将在高空中获取的影像、视频、图片通信网络,传输到前端。相比常规的飞机,无人机更加适用于执行存在一定危险性的任务,目前,我国在无人机领域的研究已经达到了一个阶段性过程,相关应用也在市场内取得了显著性的成果。其中,民用的无人机装置主要应用在大学毕业作品制作、农业航拍等领域,军用的无人机装置主要应用于灾难现场地质勘查、疾控中心传染病控制、电力工程巡回检查、货物短程运输等领域。
1 无人机在矿山地质灾害中应用
1.1 布设无人机在矿区的低空拍摄像控点
为了实现无人机在矿山地质灾害中应用,需要在使用无人机设备前,在矿山地质灾害发生区域内,布设无人机低空拍摄的像控点。在此过程中,应先利用无人机进行矿山高空拍摄,掌握待测区域的基本地貌与地质情况,通过此种方式,获取矿区基本地质资料。资料应包括:矿山地质全貌图、卫星影像等,在了解与矿区相关的地质结构信息后,根据地质灾害的发生规模,对无人机上的拍摄端进行校正,确保后期低空拍摄获取的相关地质信息符合前端操作者需求[2]。同时,在矿山地形图上拟定无人机航拍路线,并设计不同无人机在同时飞行时的航向,在有必要的情况下,可对于地质灾害中心点区域,或灾点附近设计无人机的航向重叠角度。在完成对无人机低空拍摄相关参数的获取后,调整并校验无人机摄像端的分辨率,以此种方式,提高无人机获取影像的精度。
在完成上述相关工作的基础上,选择矿区内的像控点,要求选定的线控点可以清晰地拍摄到目标影像,并且十分有利于后期对地质环境的立体建模分析[3]。考虑到矿区地质结构较为复杂,采用垂直拍摄的方式,进行影像数据的获取,可能会受到拍摄过程中,边缘与高程高度的影响而出现阴影,因此,要求选定的低空拍摄像控点附近高程差值较低。在选定测控区域后,在此区域内均匀地排布像控点,并使用RTK网络模式,将布设的像控点与卫星终端之间建立某种直接通信联系。此外,需要使用终端仪表,对获取的间断信号进行连续化处理,直到所有的信号形成一个连续的图像,即可召回无人机,停止拍摄。为了确保获取的影像与信息具有一定时效性,可使用中杆,对布设的像控点进行反复测量,取多次测量的平均值作为最终结果。
1.2 快速处理矿山地质灾害信息
考虑到使用无人机获取的矿山地质灾害影像信息,可能会受到外界多种因素的干扰,存在影像重叠、影像内部阴影、影像粒子尺度不清晰等问题。因此,需要在完成对连续信号的获取后,采用DPGrid导航工具,对获取的信号与连续信息进行快速处理与拼接,以此种方式,确保获取的信息可以满足终端对矿山地质灾害处理、预测、测绘等方面的需求。
按照上述图1所示的流程,对矿山地质灾害基础信息进行处理,但由于获取的部分信息属于复杂信息,仍沿用基础信息处理流程无法满足终端对连续影像获取的需求,因此,可在完成图1中影像处理工作的基础上,按照下述步骤,对获取的信息进行深度处理,具体内容如下。
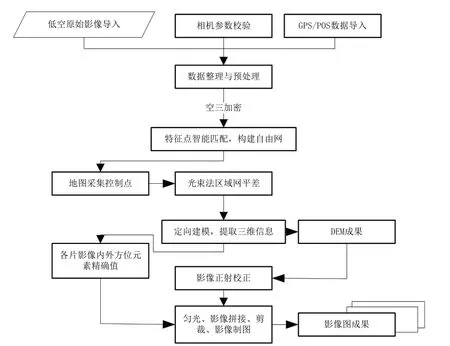
图1 矿山地质灾害基础信息处理流程
第一步,在与无人机通信的终端设备上,建立一个新建文件夹,在文件夹内创建一个Context Capture文件,并设定影像信息与连续信号的定向导入路径。
第二步,将无人机本地照片与影像导入此文件夹内,对文件夹的参数进行调整,设置一个可行度较高的影像采样率[4]。同时,检查拍摄影像与图片的完整性,对于相同区域内获取的影像,将其归为一个照片组,对其设定一个相机参数,参数设定时,可点击鼠标右键,在菜单栏中导入前期对无人机设定的校正参数。
第三步,对每个照片组设定一个名称,设定时可以根据“无人机拍摄时间—拍摄区域—拍摄内容”进行命名,在此基础上,根据空间三相角度,对图片与影像进行计算,并选择默认模式,选择全部的影像图片,参考影像的定位信息与地理信息,对影像文件夹进行参考信息的重新设定。在完成相关参数的设定后,对空间信息进行检索,定位所有的像控点是否与航片中的指定拍摄点对应。
第四步,构建一个针对矿区的三维地质模型,建模前,应当先生成一个产品类型,选择地质灾害的导入格式与缩放比例,确定地质灾害在矿区内的坐标轴与平移量,完成相关操作处理后,提交三维建模成果到卫星通信端。
第五步,打开无人机检索引擎,对配置文件中的任务传输路径进行定位,检查此路径与预设的路径是否匹配或一致,并将终端存储的OSDB数据,与拍摄得到的正射影像进行集成,将集成后的图像导入EPS三维测绘软件中,以此实现对矿山地质灾害区域的成图,完成对矿山地质灾害信息的快速处理。
1.3 矿山地质灾害影像解译与分析
在完成对获取影像与图像的处理后,需要使用终端多种设备与技术,对矿山地质灾害影像进行解译与分析,与此同时,将解译端与现场指挥部门之间建立直接通信联系,确保前端可以第一时间获取地质灾害现场数据[5]。为了使灾害发生点的影像成像更加清晰,可在完成上述相关工作后,将校正的影像进行DOM叠加,将叠加后的信息与矿山地质图像进行匹配,以此确定灾害中心点,确保灾害救援工作的有序实施。
在此基础上,将无人机获取的影像信息调整到一个较高的分辨率,此时,可在DOM影像上获取矿区地质灾害的发生边界,沿着边界进行灾害信息与数据的采集,最终按照对应的比例尺,计算受灾区域的占地面积与规模。
同时,使用GIS软件,在super Map工具的支撑下,沿着受灾区域边界,绘制一个针对此区域的详细地势图,形成一个具有多边结构的数据,在完成对边缘数据的处理后,将5.0m作为一个间隔,进行DEM数据的定向采集。并将地质水平面作为高程基准面,计算灾害发生中心点与高程位置的直线距离与垂直高度存在的差异,以此种方式,可以得到一个高程基准面距离边缘区域面的立方体区域,将此区域的立方体积定义为V1,在DEM数据集合中,按照相同的方式,计算从此区域到基准面地表的立方体区域体积,将此区域的立方体积定义为V2,此时可使用V1- V2的方式,得到一个具体数值,此数值为矿山地质灾害发生量。
此外,通过无人机航拍的多维度影像数据,对地质灾害区域内的路径形状、范围、长度等进行综合解析,结合区域的地形与地势,可以得到受灾面积。以此完成矿山地质灾害影像解译与分析工作,实现无人机在矿山地质灾害中应用的研究。
2 实例应用分析
在完成无人机在矿山地质灾害中应用的研究后,选择某常发地质灾害的矿区,作为此次实例应用分析的试验点,按照1.1提出的内容,在矿区内布设无人机低空拍摄像控点,调用无人机,对圈定区域的图像进行获取,以前端反馈数据的分辨率与清晰度,作为评价此次实验有效性的依据。根据试点区域的规模,选择I、II、III、IV点作为像控点,获取无人机在四个像控点获取的影像信息,将影像与图像分辨率整理成表格。如下表1所示。
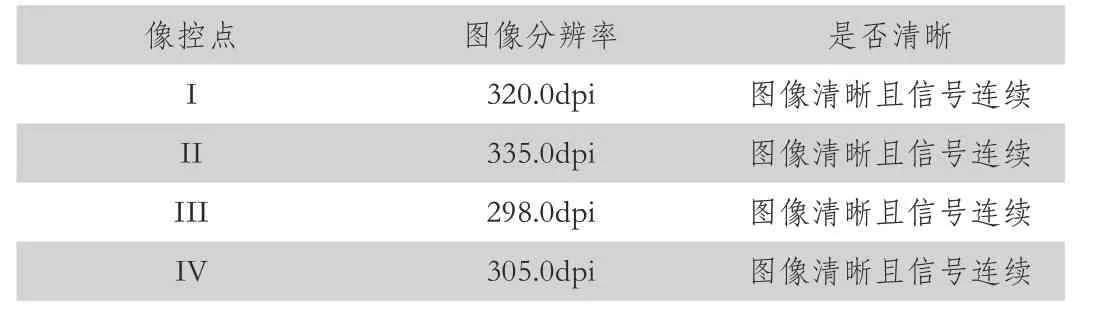
表1 实验结果
根据上述表1所示的信息可知,无人机获取的图像分辨率均在300.0dpi,此分辨率可以满足印刷品图像分辨率,且终端获取的图像信号呈现连续分布,因此证明本文提出的无人机应用过程,具有一定可行性。
3 结语
在深入对无人机应用的市场调查研究中发现,相关无人机在矿山地质灾害中应用研究仍存在空白,为了发挥无人机在市场内更高的作用,本文深入到与此方面相关的研究中,拓展无人机的应用领域,在真正意义上实现使无人机成为一个“会飞的相机”。
猜你喜欢
河北地质(2021年2期)2021-08-21 02:43:50
神剑(2021年3期)2021-08-14 02:30:08
昆钢科技(2021年2期)2021-07-22 07:47:06
矿产勘查(2020年7期)2020-12-25 02:43:42
矿产勘查(2020年6期)2020-12-25 02:42:12
矿产勘查(2020年5期)2020-12-25 02:39:06
矿产勘查(2020年5期)2020-12-19 18:25:11
矿产勘查(2020年5期)2020-12-19 18:25:11
数学物理学报(2019年3期)2019-07-23 01:15:40
家庭影院技术(2018年9期)2018-11-02 05:31:32
