车载平视显示技术中的光学元件研究
2021-11-12 03:21:24金晶吴君瑶程芳芳张丹陈瑾
汽车实用技术 2021年20期
金晶,吴君瑶,程芳芳,张丹,陈瑾
车载平视显示技术中的光学元件研究
金晶,吴君瑶,程芳芳,张丹,陈瑾*
(安徽师范大学物理与电子信息学院,安徽 芜湖 241002)
为将平视显示技术与增强现实技术相结合,让驾驶员在平视状态下获取车速、转速、油量、实时导航等信息,还可以对车外的实时道路环境进行识别,并显示出相应的数据信息,从而避免驾驶员因低头查看驾车信息而产生的视野盲区时间,减少潜在的交通事故。文章采用自由曲面离轴反射光路结构设计车载平视显示系统,但由于其光学系统中的像差也更难以矫正,故通过改进光学元件减小像差方法达到设计目的。从光学角度对汽车AR-HUD虚像显示原理进行分析从而进行成像质量分析。为对光学元件进行合理优化,在研究相关设计参数研究之余,借助 Zemax实现光路最终实现光学元件像差的减小。
光学设计;光学元件;平视显示;自由曲面
前言
车载平视显示技术中的光学元件研究是鉴于日前汽车普及化与交通安全两相结合下的问题研究。本项目研究的车载平视显示系统(Head-Up Dispiay, HUD)是通过光学镜片的反射与折射将行车信息以虚拟的图像投影到车载挡风玻璃前,以便驾驶员行车过程中可以在前方获取车速、油量、道路实况等信息。这样可以避免因低头看信息产生的盲区时间,可减少部分交通事故。因此汽车 HUD 对提高驾车舒适度、保障行车安全有着重要的意义。
目前,汽车HUD仍处于初步开发阶段。经过大量研究调查,本文总结了近年来国内外对汽车HUD光学系统的相关研究。德国Heilbronn大学的Peter Ott提出了关于汽车HUD光路中反射镜的几种设计方法;胡宇研究了汽车HUD显示虚拟图像的内容颜色、对比度、距离、俯仰角、布局等问题[1];王兴通过自由曲面反射镜设计了视觉距离为2 m的汽车WHAD光路结构,但汽车挡风玻璃在光路中与实际不规则表面形状并不一致[2];王睿设计了一种包含自由曲面反射镜的折射和反射混合光学系统,但由于在光路中同时使用了折射和反射光学元件,导致光路结构更加复杂,不利于安装在汽车仪表盘有限的空间内[3]。随着对HUD技术成熟,如今越来越多人参与了相关研发。
本文通过Zemax软件对于光学元件的系统优化以及通过使用层次分析法对自由曲面相关参数进行权重分析从得到最优化的自由曲面设计,两相结合从而得到产生像差最小的光学系统。本文对组成元件以及平视显示系统中的各参数进行合理提设,分析了光学系统的性能需求,提出了具体的光学设计参数,指出了光学系统的优化步骤,并对已经优化的光学系统进行评价。最后进行了合理性验证,结果表明本文提出的优化过程是可行的。
1 理论基础
1.1 车载平视显示系统结构
车载平视显示系统主要由提供像源的光电子系统和投影虚像的光学系统构成。光电子系统内部通过电路驱动将行车信息与探测的数据传递给像源系统,像源系统再将处理后的图像输入给光学系统,光学系统最后把放大后的图像投影在挡风玻璃前。本文主要研究光学系统内部光学元件对像差的改进与优化。
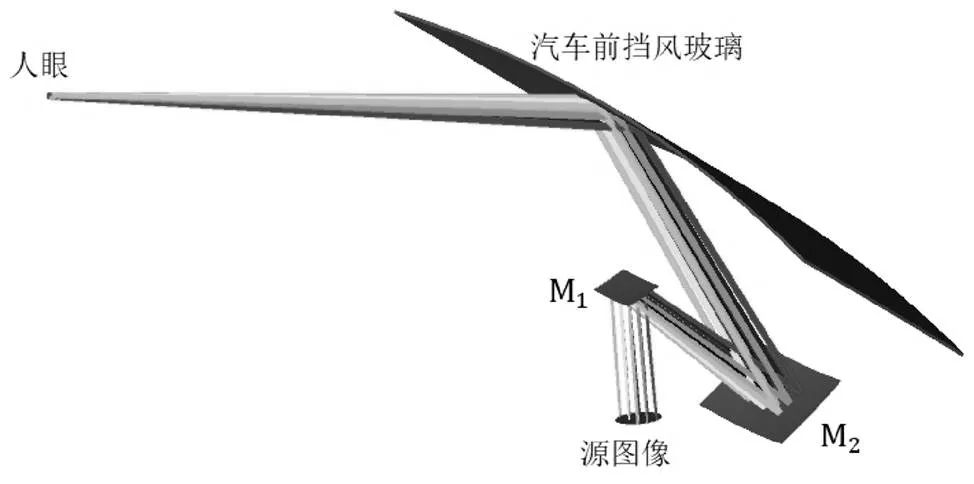
图1 汽车AR-HUD虚像显示光路
光学系统主要由反射镜片和汽车前挡风玻璃组成,如图M1为球面反射镜,M2为XYP多项式表示的自由曲面反射镜。其中,传统的平面与球面反射镜片自由度无法满足现在AR-HUD,并且作为一个离轴光学系统,挡风玻璃和传统反射镜片引起的像差会产生严重的离轴像差,故采用自由曲面反射镜来有效矫正像差。概念图如图1所示。
1.2 光学系统像差
平视显示系统所形成的虚像中球差、慧差、场曲、像散均会引起弥散斑,而畸变会使像产生形变,从而产生一定像差导致分辨率的降低而引起的成像不清晰。本文中主要阐述的关于相应光学元件引起像差因素主要包括所采用自由曲面的不同,其包含外形尺寸的大小、制造精度的高低、对称轴等因素,同时还有光束孔径、成像空间等因素。
基于传统光学设计中所采用的标准球面面型的光学元件在用于矫正像差的过程中,由于光学结构的影响而致使所需空间更大,故而在本文实验中我们采用自由曲面。在通过层次分析法选定最优化参数后,选择借助Matlab 软件针对XYP多项式的数据拟合进一步对光学元件进行优化调整公差,从而确定最后拟合面型。
层次分析法根据问题的性质和所需达到的总目标,将问题分解为不同的部分,并按照因素间的相互关联影响以及隶属关系将因素按不同层次聚集组合,形成一个多层次的分析结构模型,从而最终使问题归结为最低层(供决策的方案、措施等)相对于最高层(总目标)的相对重要权值的确定或相对优劣次序的排定。在本问题中,我们将选择的非球面元件作为我们的目标层,影响决策的主要因素包括外形尺寸、制造精度、对称轴、光束孔径、成像空间,从而通过层次分析法进行分析,并在运算过程中通过不断改变相应因素的权重关系最终确定了产生像差最小的非球面元件设计方案,如图2(a)、(b)所示。
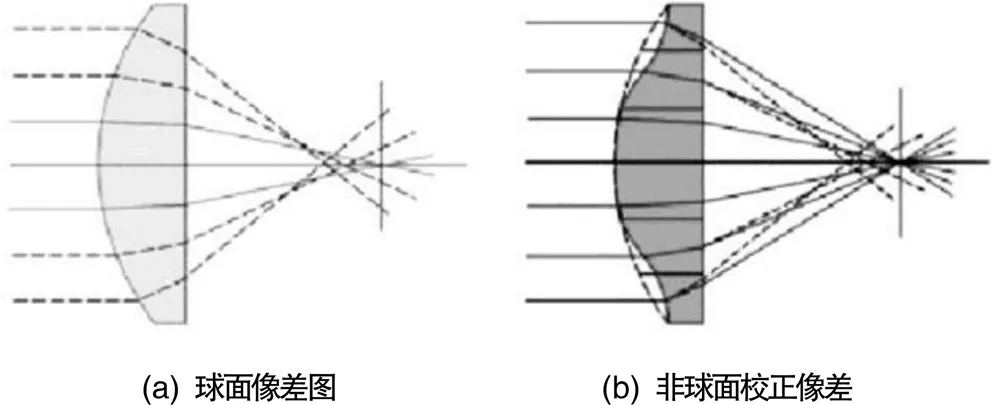
图2 球面与非球面像差图
2 车载平视显示系统仿真优化实验
2.1 汽车AR-HUD设计步骤
首先我们根据指标设置标准范围内的参数规格,挑选可用光学元器件,通过思路设计搭建光路。核心是利用自由曲面的多项式系数优化变量设计,借助Zemax软件对光学元件进行优化,并对光学元件的公差做初步分析,以下为设计具体路线。
第一步:利用Zemax搭建简化的 AR-HUD 光路。在Zemax中设定各个参数实现光路图通顺,仿真中包括光路系统整体设置、创建光学元件、透镜组、元件间大致间距等。其中,波长、入射直径、视场角的设置尤其重要。
第二步:对相关光学元器件的研究和改善。在成像光学系统中,尝试打破传统的平面与球面反射镜片自由度,采用自由曲面结构设计汽车前挡风玻璃,并结合XYP多项式描述挡风玻璃面型。其结构设计大大减少了由光学元件导致的像差。
第三步:对光路成像质量评估。结合Zemax的 Multi- Configurations 功能模拟实际的光阑孔径,对不同方位的成像质量进行检测。将得到虚像空间光学传递函数。绘制MTF曲线,分析畸变曲线,对成像质量进行评估和修改。
第四步:对光学系统进行公差分析,采用 Merit Function(评价函数)来进行优化设计。设置透镜的厚度、透镜的曲率半径、透镜间的距离等因素为基础变量,通过优化得到的相关数据算出最终的权重比,从而对相应的光学元件进行选择设置来改善系统中光学元件引起的像差。
2.2 光路仿真
汽车 AR-HUD 光路模拟由Zemax软件设计,首先设置物镜和目镜参数距离,仿真一面凹球面镜,实现成像的光路能够起轴向和纵向的放大作用;其次输入参数建立一面凸球面镜,减少光通过凹球面镜产生的像差。通过建立简单的光路模型起到替代挡风玻璃的作用。
为了让本次优化的光学元件更贴合汽车成像,故而针对汽车前挡风玻璃的面型建构中,从 Matlab 软件出发,寻找合适的面型,用云端数据进行拟合,拟合出的XYP多项式为:

其中Z表示Z轴方向的矢高差,c为曲率半径,x2+y2=r2,k表示圆锥曲面常数,a1,a2,a3,a4,a5,a6分别为高次项系数。模型如图3所示。
在Matlab中,根据表1得到前期实际具体点云数据,从而代入上述XYP多项式,进行XYP多项式实际拟合过程,得到最终汽车前挡风玻璃的拟合面型,如图4所示。
表1 汽车前挡风玻璃面型数据
曲率半径/mmka1a2a3a4a5a6 1×10−4−4.698−0.045−0.324−0.6500.023−0.0040.015
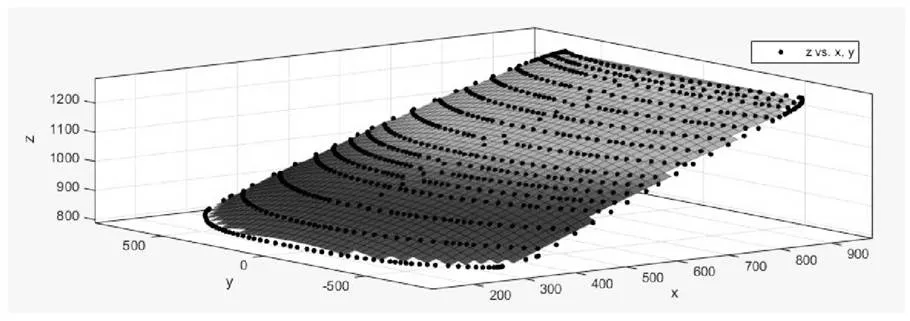
图4 汽车前挡风玻璃的拟合面型
借鉴上文所述,采用反射式离轴光路的方法,使用软件对光路做优化处理,呈现合理范围内的结果。初步设计的光学路径如图5所示。将程序中源图像尺寸设置合理的范围值,M1为凸球面镜,M2为凹球面镜。通过资料查找探究,我们了解到其实孔径光阑的偏移范围与反射镜的通光孔径有关。结合实际情况,为减少预算投入,可以缩小光路中设置的 Eyebox 数值范围。主要技术参数如表2。
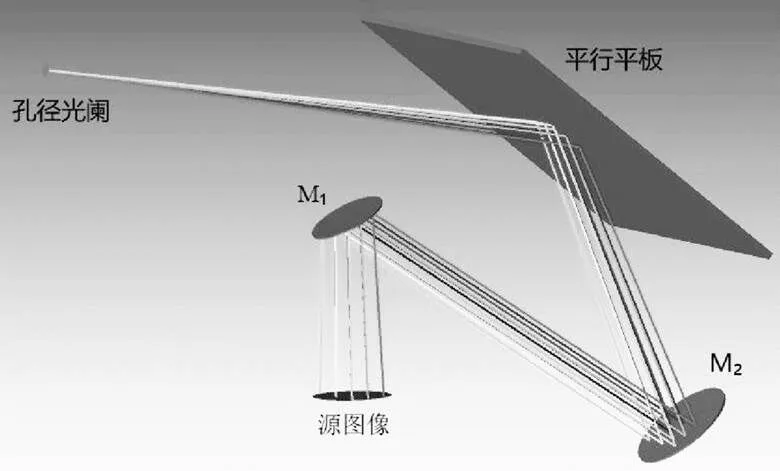
图5 实验光路仿真图
表2 实验光路虚像参数
技术名称性能参数 虚像视距1 445 mm 虚像视场角2.9°×1.6° Eyebox85 mm×45 mm
因为虚像视距=孔径光阑到平行平板的距离+虚像到平行平板中心距离,孔径光阑到平行平板的距离为 331 mm,虚像到平行平板中心距离为 1 087 mm。对虚像进行光线追迹如图6所示。
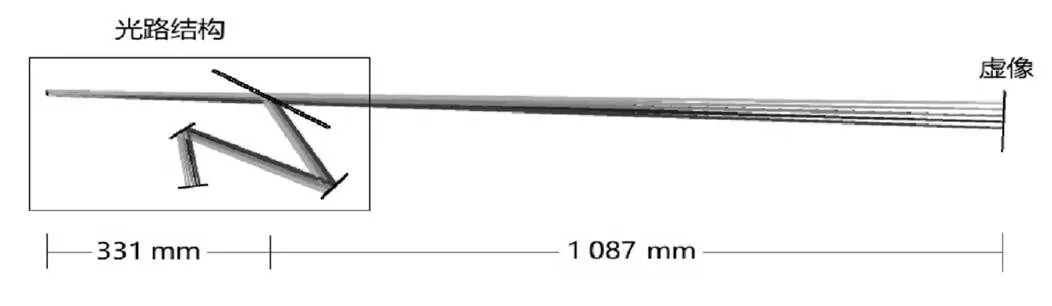
图6 虚像光线追迹图
实际操作中,为便于简化光路,利用薄透镜代替挡风玻璃做自由曲面优化设计,如图7所示。Zemax软件自动优化系统对参数合理化。并使用分析函数,对结果分析优化。为了让光线充分进去到光路当中,这里可将直径设置为4 mm。根据可见光的波长是380~780 nm,即采取默认系统波长550 nm。
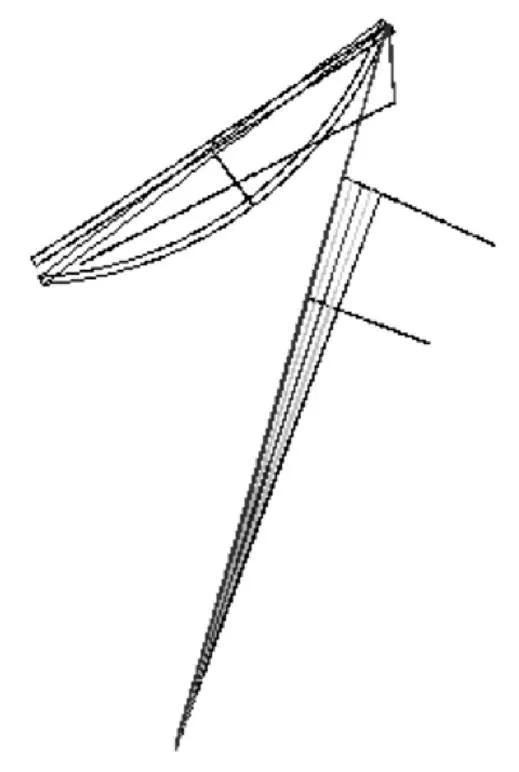
图7 平面图仿真
实验结果显示,所用数据参数仍然存在问题。将人眼与汽车 AR-HUD 光学系统作为整体进行成像质量评价。数据要进行多组化设定,使用 Zemax 的 Multi-Configurations 功能把 5 个孔径光阑位置点设置成 5 组数据,即使用 5 重的结构来模拟孔径光阑在不同位置时的成像情况。并根据计算得出如图8效果图所示。
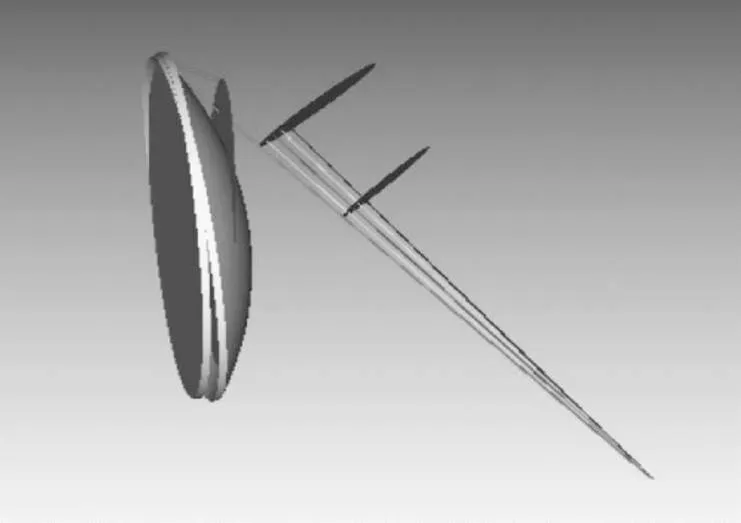
图8 3D效果图
2.3 实验验证
按照前文所阐述的实验光路仿真设计搭建的相对应实体光路,为了更符合理论和贴近实际需要作出合理的相关实验验证:
2.3.1 虚像视距测试
在前文中已经阐释虚像原理并指出虚像无法被光屏直接接收,故而要想对虚像视距进行测量需要前面所提及的光学元件中的球面凸透镜将原本的虚像经过光线汇聚后呈现实像从而在光屏上得以呈现。在虚像视距测试中设定凸透镜的焦距为100 mm,凸透镜距离平行平板300 mm,经过试验测得凸透镜到光屏间距107.7 mm。
为测得相应虚像视距,使用光学高斯公式:
其中:'屏为光屏与凸透镜的间距;虚指凸透镜与虚像的间距;'凸为凸透镜的焦距。
将上述实验数据代入公式可以得到凸透镜与虚像的间距为−139 8 mm。由于虚像视距=凸透镜与平板的间距-凸透镜与虚像的间距+平板到人眼的距离。最终实验数据为1 429 mm。而在仿真设计的理论中我们所的虚像视距值为1 418 mm。这里导致理论值和实验值具有误差的主要原因是光路组装过程中的细微误差以及实验数据测量的不可避免的误差。在忽略上述绝对误差的情况下可以得到实验结果和理论结果的相对一致。
2.3.2 虚像视场角测试
为了更方便测试虚像视场角,同时鉴于虚像无法通过光屏直接接收。故实验中在形成虚像位置处放置足够大的刻有数值的平行板,形成虚像时使用相机进行实时拍摄记录。在实际实验中测得对应虚像大小为70 mm×35 mm。利用数学知识进行计算可得:
虚像视场角在水平方向上为:
虚像视场角在竖直方向上为:
在前文所阐述的仿真设计中得到的理论值为2.7°×1.4°,实验值为2.8°×1.4°,在一定范围内允许误差存在,故而可以得到实验结果和理论结果的相对一致。
2.3.3 Eyebox测试
在前文的阐释中我们所设置的相对应的Eyebox范围是80 mm×40 mm。在实际操作中通过使用相机模拟人的眼球,在Eyebox范围的不同方位对虚像进行测试。测试结束后发现均可以得到清晰的虚像,故而可以得到实验结果和理论结果的一致。
3 总结与展望
本文旨在设计一种与现代现实更加吻合的AR-HUD车辆,针对当下AR-HUD的市场需求和已有的光学系统,分析内部光学元件,对系统设计后的像差进行矫正,运用Matlab软件对对XYP多项式的数据拟合并对非球面的高次系数进行优化,最后再凭借Zemax对其成像质量和公差容错进行评价,并进一步优化结果,减小误差,再利用实验进行验证,与仿真设计的理论值进行比较获得方案设计的合理可行性从而得到最后优化后的光学系统。
本文中虽然主要对于汽车AR-HUD中的光学元件进行了一定的探究并进行了光学系统的优化。以像差的矫正为主,提出了理论方案,但由于现实环境的限制,仍存在一定的不足需要进一步完善:(1)所进行优化后的光学系统虽已进行了实验验证,但对于安置于汽车仪表台中的实际问题仍需要和汽车厂商进行下一步的沟通与协调,根据实际汽车构造进行进一步的结构微调;(2)由于本文中的AR-HUD产品只是将其光学系统单独拿出进行研究验证,实际放置于汽车中还需要和汽车整体的光学电路进行整体规划,故而在此方面仍需要进一步改善调整。
[1] 胡宇.车载抬头显示器系统的研究[D].武汉:武汉理工大学,2012.
[2] 王兴.车载平视显示光学系统技术研究[D].长春:长春理工大学, 2014.
[3] 王睿,江伦,宋志化.基于微型投影的集成式车载平显光学系统设计[J].激光与光电子学进展,2018,55(11):424-430.
Research on the Optical Elements in the Head-up Display Technology
JIN Jing, WU Junyao, CHENG Fangfang, ZHANG Dan, CHEN Jin*
(School of Physics and Electronic Information, Anhui Normal University, Anhui Wuhu 241002)
To combine head-up display technology with augmented reality technology, the driver can obtain real-time navigation information such as speed, speed, oil quantity and so on in the head-up state, which can also identify the real-time road environment outside the vehicle, and display the corresponding data information, so as to avoid the driver because of looking down the driving information caused by the blind field of vision time, reduce the potential traffic accidents. Therefore, the free-form surface off-axis reflected light path structure is adopted in this paper. However, since the aberration in its optical system is more difficult to correct, the design goal is achieved by improving the method of reducing the aberration of optical elements. The principle of automotive AR-HUD virtual image display is analyzed from the optical point of view to analyze the image quality. In order to optimize the optical elements reasonably, ZEMAX is used to realize the optical path and finally achieve the reduction of optical element aberration in addition to the study of relevant design parameters.
Optical design; Optical element; HUD; Free-form surface
O439
A
1671-7988(2021)20-89-05
O439
A
1671-7988(2021)20-89-05
10.16638/j.cnki.1671-7988.2021.020.021
金晶(1999—),女,就读于安徽师范大学物理与电子信息学院,主要从事光电信息科学与技术相关的研究工作。
陈瑾,女,高级实验师,就职于安徽师范大学物理与电子信息学院,主要从事光电信息科学与技术相关的研究工作。
安徽省大学生创新创业项目(编号:S202010370330)支持。
猜你喜欢
新作文·高中版(2022年4期)2022-12-26 20:15:45
公民与法治(2022年10期)2022-10-12 07:46:14
新作文·高中版(2022年4期)2022-07-31 10:19:46
中学生数理化·八年级物理人教版(2022年11期)2022-02-14 06:37:22
中学生数理化·八年级物理人教版(2021年11期)2021-12-06 06:44:30
视野(2019年22期)2019-12-02 03:59:34
妇女(2019年5期)2019-07-02 07:58:08
物理教师(2019年2期)2019-03-26 05:37:52
中学生数理化·八年级物理人教版(2018年11期)2019-01-31 02:40:08
作文·初中版(2017年10期)2017-10-25 10:09:40