
M-FCN based sea-surface weak target detection
2021-11-11 05:32:28PANMeiyanSUNJunYANGYuhaoLIDashengandYUJunpeng
PAN Meiyan, SUN Jun, YANG Yuhao, LI Dasheng, and YU Junpeng
1.The 14th Research Institute of China Electronics Technology Group Corporation, Nanjing 210039, China;
2.Key Laboratory of IntelliSense Technology, China Electronics Technology Group Corporation, Nanjing 210039, China
Abstract: This paper focuses on the sea-surface weak target detection based on memory-fully convolutional network (M-FCN)in strong sea clutter.Firstly, the constant false alarm rate (CFAR)detection method utilizes a low threshold with high probability of false alarm to detect sea-surface weak targets after non-coherent integration.Reducing the detection threshold can generate a large number of false alarms while increasing the detection rate, and how to suppress a large number of false alarms is the key to improve the performance of weak target detection.Then,the detection result of the low threshold is operated to construct the target matrix suitable for the size of fully convolutional networks and the convolution operator form.Finally, the M-FCN architecture is designed to learn the different accumulation characteristics of the target and the sea clutter between different frames.For improving the detection performance, the historical multi-frame information is memorized by the network, and the end-to-end structure is established to detect sea-surface weak target automatically.Experimental results on measured data demonstrate that the M-FCN method outperforms the traditional track before detection (TBD) method and reduces false alarm tracks by 35.1%, which greatly improves the track quality.
Keywords: sea-surface weak target detection, memory-fully convolutional network (M-FCN), multi-frame information, end-toend.
1.Introduction
In radar detecting, the weak target signal will inevitably be affected by interference signals such as noise and sea clutter.Sea clutter is not only affected by radar parameters, but also by complex environments and sea conditions; it has complex characteristics, strong amplitude,and strong time correlation.It is easy to cause a large number of false alarms during low threshold detection,which becomes the main factor restricting radar detection performance [1,2].Maritime target detection in complex marine environment plays a vital role in radar signal processing especially for sea-surface weak (or low signal clutter ratio (SCR)) targets such as periscopes and small boats, and it is also a difficult problem to be solved urgently at home and abroad.When the detection threshold is lower, a large amount of sea clutter will be mistaken for targets which affects the performance of weak target detection, and causes a large number of false alarms.In order to suppress false alarms, it is necessary to explore the different characteristics between the target and the sea clutter and separate them from different feature domains,so as to achieve sea-surface weak target detection embedded in strong sea clutter [3].
For improving weak target detection performance, it is important to suppress false alarms in traditional detection methods.In view of the high false alarm problems often encountered in sea-surface weak target detection, Li [4]studied two-level adaptive detection algorithms to reduce the false alarm rate.Aiming at the problem of large amount of computation of the adaptive matched filter(AMF) detector [5], a fast Fourier transform (FFT) AMF algorithm is proposed, but it has certain limitations.Another effective detection method is track before detection(TBD) [6,7], which accumulates the detected target signals (including multiple clutter signals) between frames and compares the occurrence probability of the detected target echo signal and sea clutter signal in adjacent frames.Due to the “non-Gaussian”, “non-linear”, and“non-stationary” characteristics of sea clutter [8,9], the amplitude of sea clutter fluctuates randomly in adjacent frames so it cannot always be detected; while for the target signal, the probability of occurrence in each frame is similar, and it is detected for more times than clutter.Therefore, the target signal can be separated from sea clutter by accumulation between frames.This method can suppress some false alarms, it is mainly based on theN/Mcriterion [10], that is, if there areNframes detected in theMframes, the target is considered to exist.The criterion can only be adjusted by experience or measured data, and the time-consuming processing affects the real-time process of detection signal processing.
With the development of artificial intelligence, sea-surface weak target detection methods have ushered in new opportunities and challenges.How to apply machine learning to signal processing has gradually become the development direction of the radar field, in order to realize intelligent radar, reduce manual operations and intervention, and thus improve the radar’s automated processing capability.Aiming at the problem of sea-surface target detection in strong sea clutter, an end-to-end memory-fully convolutional network (M-FCN) [11] weak target detection method is proposed.This method preprocesses the low-threshold detection results, constructs the detected point results into target matrices suitable for the size of the fully convolutional network and the shape of the convolution operator, and designs M-FCN for seasurface weak target detection.The architecture enables the fully convolutional network to learn the different characteristics of the target and sea clutter accumulated in different frames, and replaces the traditionalN/Mcriteria with the different characteristics between frames for endto-end automatic detection of sea-surface weak targets,realizing the suppression of sea clutter under high sea conditions.
The remaining of the paper is organized as follows.In Section 2, principles and advantages of the fully convolutional network are analysed, and the M-FCN is established.In Section 3, we illustrate the principle of the MFCN sea-surface weak target detection algorithm, and the pros and cons of the M-FCN detection method are presented, which is followed by experimental results with radar measured data in Section 4.Finally, Section 5 presents some concluding observations.
2.Principles of M-FCN
2.1 Principles and advantages of FCN
In the field of deep learning, typical target detection and recognition networks include LeNet and AlexNet [12,13],which have deep layers with complex structures, and all get non-spatial output of the judgment category through fixed-size input.The connection layer has a fixed size and discards the spatial coordinates.The FCN can accept input images of any size, and can obtain the characteristics of multiple regions after one convolution, which is mainly used for image segmentation [14] and target detection [15−17].Many different types of machine learning methods, such as support vector machine SVM [18],decision tree [19], and convolutional neural network(CNN), have been applied to target detection and recognition.The detection of targets under sea clutter is realized by identifying whether they are targets or clutter.However, due to the limitation of the input fixed size, the CNN-based recognition method is restricted: it requires a large storage space, the calculation efficiency is low, and the receptive fields are greatly affected by the convolution kernel and pixel block [20].This makes the traditional recognition method only extract some local features,which limits the performance of classification.Compared with the traditional target detection algorithm, the M-FCN target detection algorithm has a significant improvement in detection effect and recognition classification.This section introduces in detail the method of MFCN for weak target detection in high sea conditions and sea surface target feature extraction and recognition.
2.2 M-FCN
In this paper, the sea-surface weak target detection algorithm based on M-FCN is proposed.By constructing a new M-FCN structure and using historical time information, given input images with spatial information, the pixel-level detection and recognition results are obtained at the network output layer to achieve end-to-end weak target detection and false alarm suppression.The M-FCN mainly consists of two convolutional layers and two deconvolutional layers [21], so the output size is the same as the input.The input of the network is azimuth-distancetime three-dimensional information, the radar scan azimuth is used as the input width, the original data distance unit is used as the input height, and the multi-frame detection results consist of memory information, which are jointly input into the network.To ensure sufficient memory space without losing accuracy, the input to the M-FCN network is a multi-frame superimposed point and trace matrix.The target position is 1, and the clutter position is 0, forming a feature matrix containing 0 and 1.In order to ensure spatial association, 30 frames of data are selected as input to obtain historical temporal information, and the constructed M-FCN structure is shown in Fig.1.
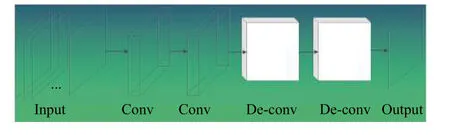
Fig.1 Structure of M-FCN
The selection of the gradient descent algorithm or optimizer in machine learning and deep learning methods is extremely important.The deep learning framework used in this paper is Keras, where the optimizer includes stochastic gradient descent (SGD) [22], Adagrad [23],Adadelta [24], mean square estimation RMSprop [25],and adaptive moment estimation Adam [26].Ruder [27]compared the pros and cons of various commonly used optimizers in the paper.The SGD algorithm updates the gradient of each sample, which will cause serious oscillation of the loss function, reduce the convergence speed and is not conducive to convergence to the global optimum.The Adagrad algorithm can make larger updates to low-frequency parameters, and the high-frequency parameters update is small, and the learning rate does not need to be adjusted manually, so it performs well on sparse data, but the learning rate will gradually shrink and eventually become very small.The Adadelta algorithm is an improvement to the Adagrad algorithm, which uses the root mean square to update the current gradient.RMSprop is an adaptive learning rate method, which can solve the problem of Adagrad’s sharp decline in the learning rate.It is suitable for non-stationary targets and has a good effect on recurrent neural network (RNN), but it introduces a super-parametric attenuation coefficient and depends on the global learning rate.The Adam algorithm combines the advantages of the Adadelta and RMSprop algorithms.The Adam algorithm designs independent adaptive learning rates for different parameters by calculating the first-order moment estimation and the second-order moment estimation of the gradient.So the learning rates are limited to the specified range during iteration,and the parameters decline steadily.Practice shows that the Adam algorithm is better than other adaptive learning methods [27].
The loss function expresses the degree of preference of the network, and is usually used as a learning criterion and optimization problem to solve and evaluate the model by minimizing the loss function.The cross-entropy loss function used in this paper is essentially the application of cross-entropy in information theory to classification problems, and uses the Adam algorithm for gradient backpropagation.Minimizing the cross entropy is equivalent to minimizing the relative entropy between the observed value and the estimated value, that is, the Kullback-Leibler (KL) divergence of the two probability distributions, which is an unbiased estimate.The cross entropy is defined as

In this paper, the cross entropy represents the KL divergence of the probability distribution between the observed and estimated values of the target and clutter samples.Minimizing the cross entropy makes the observed value and the estimated value the closest, that is,the training model has the best performance.
3.M-FCN weak target detection algorithm
3.1 Principle of M-FCN detection algorithm
In high sea conditions, due to the “non-Gaussian”, “nonlinear”, and “non-stationary” characteristics of sea clutter,the sea clutter and the target are very similar in amplitude and correlation characteristics.The constant false alarm rate (CFAR) detection method and other detection methods will cause a large number of sea clutter false alarms when detecting targets.Raising the detection threshold will suppress the false alarms while losing the target signal, and the loss of the target signal is a very serious problem in radar detection.Therefore, it is a good choice to set a lower detection threshold to ensure that the target signal is not lost but a large number of false alarms are suppressed.This depends on the differences in temporal and spatial characteristics between the target and the sea clutter.Based on the low-threshold detection radar traces, we pre-process the original range-azimuth traces into a trace matrix of size 993 × 561, the range resolution is 37.5 m, and the azimuth resolution is 0.1429°; and we make training samples and labels according to certain rules, train the constructed M-FCN, and obtain an output model with remarkable performance.Fig.2 shows the basic framework of the M-FCN weak target detection algorithm.
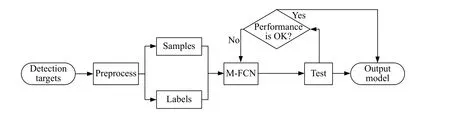
Fig.2 Basic flow of M-FCN weak target detection algorithm
The specific steps are as follows:
Step 1Radar detection targets: The detection results of radar echoes obtained through traditional CFAR low threshold detection, including signal processing processes such as pulse compression, channel compensation,beamforming, non-coherent accumulation, and CFAR detection.
Step 2Data pre-processing: Divide the detection results into frames, remove the land clutter area, focus on the targets in the range from −40° to 40°, and construct the target point matrix suitable for the size of FCN and the shape of the convolution operator matrix.
Step 3Making samples: Pre-process the detection results into a trace matrix of size 993×561, and 30 frames detection results as 30 channels into the network input,making a total of 2311 samples by sliding window processing, half of the training set and the test set.
Step 4Generating labels: Use radar detection results and TBD algorithm to generate final detection results, obtain target track information through tracking strategies,and select the desired target track through a semi-automatic way as labels.
Step 5Training the M-FCN: M-FCN as shown in Fig.1, there are two-level convolutional layers and deconvolutional layers to achieve end-to-end detection, the input is the 30-frame detection result, and the output is the current frame detection result.
Step 6Testing the model: Test the training model to obtain the detection results after suppressing false alarms;compare the test results with the sample labels, if the performance is OK, then go to Step 7; otherwise adjust the networks parameters and structures, then return to Step 5 to continue training.
Step 7Evaluatiing results: Draw a picture of the detection results, and compare them with the results of the TBD method; then track through the same tracking strategy, get the track batch number and track quality information, to evaluate the results.
3.2 Advantages and disadvantages of M-FCN
The pros and cons of the M-FCN weak target detection method proposed in this paper are as follows:
(i) Compared with the traditional clutter false alarm suppression method, it is not affected by the input size,and can be applied to echo data of different sizes, especially for echo signals with large original data, and can also obtain significant classification results so as to achieve clutter false alarm suppression and weak target detection.
(ii) Based on the time-space multi-dimensional information of the echo signal, using the characteristics of the FCN, the radar echo signal is identified and predicted at the pixel level, and the time-space dimensions are combined to classify and identify the obtained echo data and distinguish sea clutter and real targets.
(iii) Due to the end-to-end characteristics of the FCN,by reducing manual pre-processing and subsequent operations, the model is automatically adjusted from the original input to the final output according to the echo data as much as possible to increase the overall fit and robustness of the trained model.
(iv) When there are only a few real targets, the input 0-1 matrix will have a majority value of 0, forming a sparse matrix, and occupies a large storage space, as well as reduces the calculation efficiency.
4.Experiments
4.1 Experimental radar data and environment
The experimental data in this paper is the measured echo data of radar, mainly including fishing boats, islands, cooperative and non-cooperative targets, and sea clutter.Environmental parameters for recording experimental data: this type of radar works in a shore-based environment, the antenna is elevated and the radar detection distance is about 10 − 40 km.

Table 1 Experimental hardware and software environment
4.2 Experimental process
The original CFAR detected results are used as the input of the M-FCN, and the clutter and the target are identified through the M-FCN to achieve false alarm suppression and weak target detection.Considering the correlation between target frames, 30 frames of detected results are used as 30 channel features to be input into the constructed M-FCN.After the network classification and recognition, the category of each pixel is obtained and we get the spatial position of the target.The original input detected results are shown in Fig.3.We can see that there are many false alarms which affect the weak target detection and tracking.
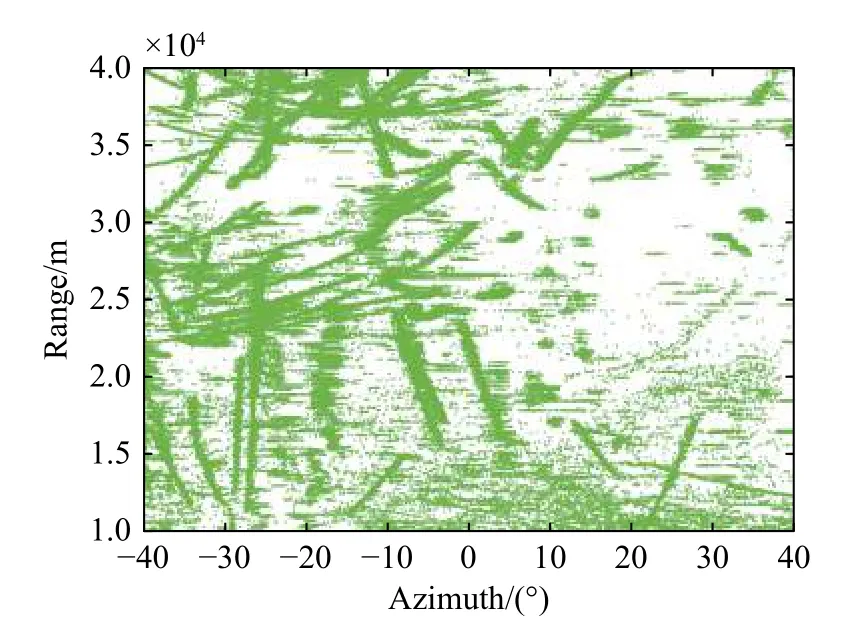
Fig.3 Original detected results of network input
For the single-frame sample input to the M-FCN, including the azimuth direction −40° to 40°, the CFAR detection results of multiple range bins, the CFAR detection target position is set to 1, and the remaining position is set to 0.A single sample is shown in Fig.4, where the blue dots indicate the location of the CFAR detection targets including some clutter.A total of 2311 samples are made, divided into training samples and test samples,each accounting for half the proportion; due to the movement of the target, the position and number of targets in the samples (different frames) are different, but the position and number of targets in adjacent frames are not much different.This provides support for the M-FCN to extract the historical information of the related features of the target in different frames.

Fig.4 Some samples of training sets
In order to facilitate the training of the network, the track results obtained after data processing are used as labels to train the network, the verification set tunes the network parameters, and the network performance is tested on the test set.According to the track results,manually selected labels with good quality track information are shown in Fig.5.As can be seen from Fig.5, according to the labels marked on the track results, most of the real targets are marked, but some target tracks are broken, a small number of targets are lost, and some clutter is not suppressed.
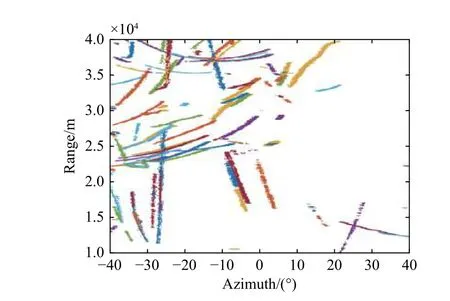
Fig.5 Labels
4.3 Experimental results and analysis
The target and clutter classification results for each frame are obtained from the azimuth-distance map.The comparison between the test results and the label is shown in Fig.6, where the blue dot “·” indicates the label marked by the real track, and the green cross “×” indicates the predicted targets.It can be seen from Fig.6 that most of the true values of the track targets have been detected,and some unmarked targets have been detected.From the original detection results in Fig.3 and the labels in Fig.5,there are some targets that are not marked.For example,the targets with azimuths between −20° and −10° and distances between 10 km to 15 km are not marked.
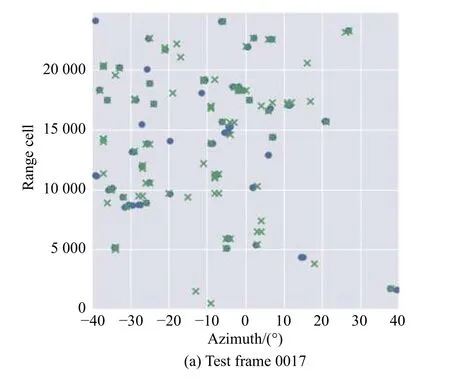
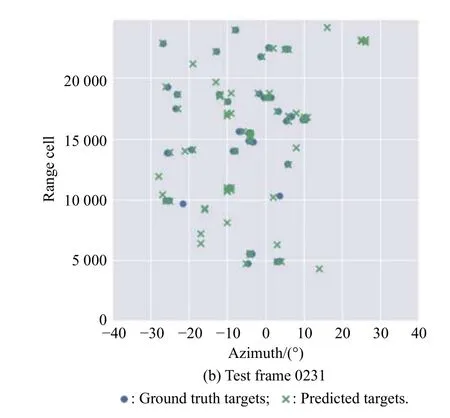
Fig.6 Detection results
Fig.7 shows the detection results of false alarm suppression in the M-FCN.From Fig.7, it can be seen that not only the marked targets are well detected, but also the unmarked targets are still detected, reflecting the powerful memory learning ability of M-FCN and retaining both historical information and spatial information.Although there is still a small amount of clutter remaining, it has little effect on subsequent track processing and can be tracked stably.The output of the original TBD detection results is shown in Fig.8.The angle measurement accuracy of the target is good, but the clutter remains relatively large, and some targets are not detected.
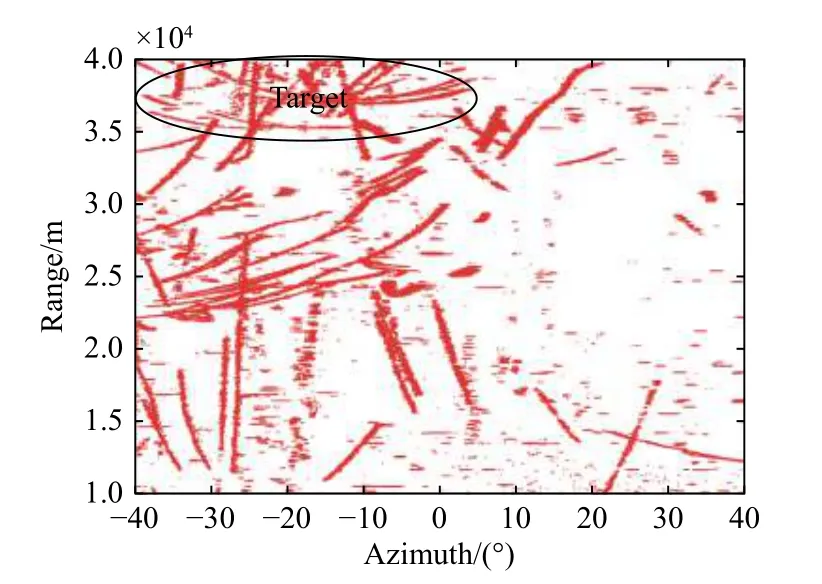
Fig. 7 M-FCN detection results
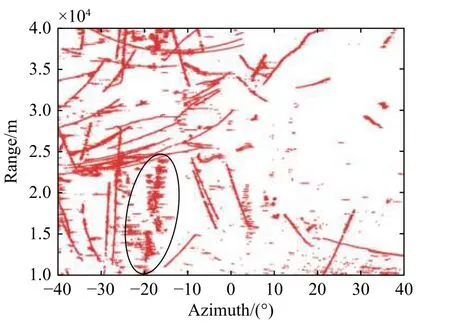
Fig. 8 Original detection results
According to the comparison between the detection results of the M-FCN false alarm suppression and the original TBD detection results, the detection threshold of the clutter and noise area is the same in traditional CFAR detection, but the subsequent clutter suppression method is different.The detection results are slightly different.At a distance of 35 km to 36 km and an azimuth of −40° to−20° (the black marked ellipse in Fig.7), the detector combined with M-FCN detected a stable target, while the traditional detection method does not detect the target.At distances between 10 km and 25 km and azimuths between −25° and −15° (the black marked ellipse in Fig.8),the fixed clutter in detection results after M-FCN weak target detection is significantly less than that of original TBD detection results, which reduces the detection false alarm rate and provides a basis for subsequent tracking.It takes about 15 min to train the network on existing equipment, but the test time is about 0.069 s per frame, which is faster than the TBD method.And the trained model can provide a basis for engineering application and implementation.However, due to the accuracy of angle measurement, the results of the M-FCN detection algorithm have an azimuth expansion, and the cohesive effect is not as good as that of original TBD detection; this is also a shortcoming of the network, which can be improved in the future research.
The experimental results of the proposal method are illustrated in Fig.9.Using the Bayesian tracking algorithm to track the traces in Fig.7 and Fig.8, the detection results after the M-FCN false alarm suppression add recognition and confidence information when entering the tracking algorithm, that is, to accurately know whether there is a target as well as the probability of the target,it provides good prior information for the tracking algorithm.Therefore, comparing the tracking results in Fig.9 and Fig.10, it can be seen that there are 220 tracks using the M-FCN algorithm, and a total of 339 tracks in the TBD method, with false tracks reduced by 35.1%; it can be seen that adding identification and probability information during tracking can greatly improve the quality of track.

Fig.9 M-FCN tracking results
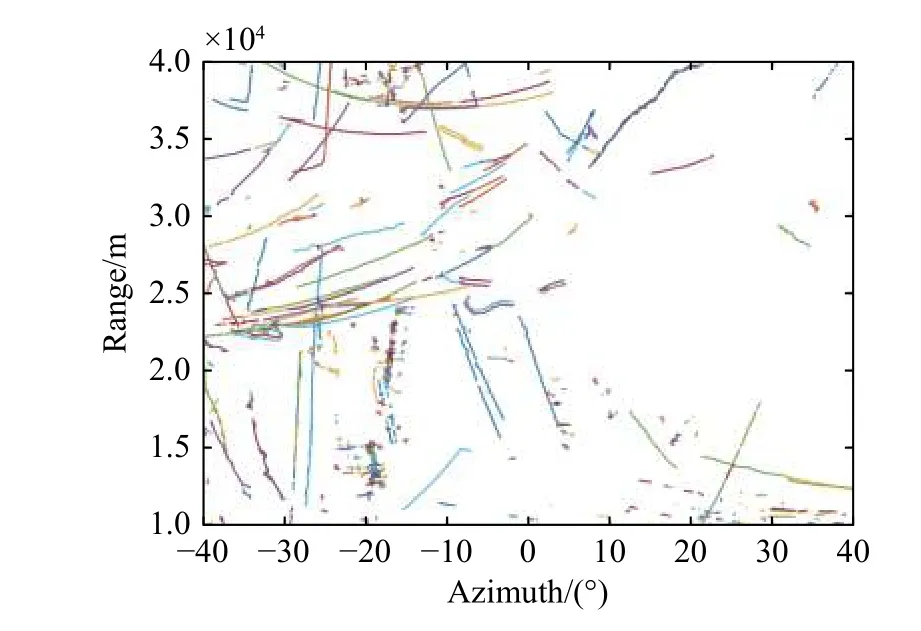
Fig.10 TBD tracking results
5.Conclusions
The main problem of weak target detection under strong sea clutter is a large number of false alarms.Based on this, this paper proposes a weak target detection method based on the M-FCN.The innovation points are summarized as follows:
(i) Make full use of the difference in time and space between the target and the clutter, through the temporal correlation and identification information, remember the historical location information between frames of the detection, and suppress the false alarms of the low threshold detection results.
(ii) The idea is similar to TBD, but the effect is better than TBD, and the computation time is lower than TBD,which greatly suppresses the clutter false alarm points,and provides identification and confidence information for subsequent tracking strategies to improve the quality of tracking.
(iii) The effectiveness of this method is verified on the measured data, which provides a basis for engineering applications and provides support for the development of intelligent radar.
 Journal of Systems Engineering and Electronics2021年5期
Journal of Systems Engineering and Electronics2021年5期
- Journal of Systems Engineering and Electronics的其它文章
- Belief reliability modeling and analysis for planetary reducer considering multi-source uncertainties and wear
- New Developments on Fault Detection and Diagnosis (FDD) and Fault-Tolerant Control (FTC) Techniques
- A method to realize NAVSOP by utilizing GNSS authorized signals
- Reliability analysis of k-out-of-n system with load-sharing and failure propagation effect
- An iterated local coordinate-exchange algorithm for constructing experimental designs for multi-dimensional constrained spaces
- An integrated simulation system for operating solar sail spacecraft