
基于实际道路数据的混合交通流运行特性分析
2021-11-06 13:15张珊王博通王智宇吉恒毅
交通科技与管理 2021年33期
关键词:自动驾驶
张珊 王博通 王智宇 吉恒毅

摘 要:为研究符合中国道路的混合交通流运行特性,搭建一套交通数据采集设备于长沙采集人工驾驶汽车和自动驾驶汽车Robotaxi的运行数据。研究结果表明,人工驾驶员跟随自动驾驶汽车趋向于保持更大的车头间距,工作日晚平峰和早平峰较相邻时段分别增加8.68 m和7.25 m;而自动驾驶汽车跟随人工驾驶汽车时会采取较为保守的控制策略,车头间距平均值在非工作日平峰、工作日晚平峰和早平峰较相邻时段分别增加了5.23 m、1.11 m和2.93 m,趋向于保持更安全的车头间距。
关键词:自动驾驶;混合交通流;实车道路采集;微观交通跟驰特性
中图分类号:U463.6 文献标识码:A
0 引言
智能网联汽车已明确上升至国家战略高度,根据SAE的分级标准,L0级汽车无自动化即为人工驾驶汽车,L1-L2级汽车为具有驾驶辅助功能的汽车,L3及以上可称之为自动驾驶汽车,开展自动驾驶技术研究对提供汽车稳定性和安全性具有重要意义。美国NHTSA在研究汽车自动化的同时,提出了基于安全的自动驾驶汽车道路行驶法规。而自动驾驶汽车面临的除了政策法规,还有道路测试、技术问题、基础设施、消费者认知等突出问题,目前L3级汽车均为限制区域的3级自动驾驶,部分企业如百度Apollo等直接研发L4级汽车。由于汽车使用寿命约为10年,未来很长一段时间内,不同等级的汽车将组成混合交通流交织运行,研究混合交通流的运行特性已成为智能交通和交通流理论的研究热点。
1 文献综述
人类驾驶员需遵从《道路交通安全法》等法律法规,虽驾驶风格有所不同,但由于长时间的交互和博弈,保持着动态平衡[1]。自动驾驶汽车根据其搭载的传感器来感知环境,并通过逻辑层进行计算,将运动决策输出至控制器,从而完成预期行驶目标。目前,自动驾驶逻辑算法较依赖于底层控制策略,会有驾驶激进、保守等不同的驾驶风格,且自动驾驶汽车的决策规划方式存在个体差异,这些差异导致自动驾驶汽车和人工驾驶汽车的驾驶行为不同,进而造就了混合交通流不同于传统交通流的新特征。
Cui等认为在混合交通流中随着人工驾驶汽车而移动的自动驾驶汽车,会在一定程度上个改变交通流特征参数;秦严严等[2]基于伯克利大学通过实车试验标定的CACC模型研究混合交通流的稳定性。Chen等通过仿真多个场景研究自动驾驶汽车对交通流的影响,结果表明引入了自动驾驶功能的混合交通流稳定性得到改善,道路通行能力得以提高。上述研究都表明混入自动驾驶汽车的交通流运行特性发生了变化,但均利用仿真数据或国外标定的实车数据,并不能充分体现中国混合交通流的真实道路运行特征,且目前交通流研究不涉及评价车辆间的跟随关系,无法了解微观交通流中车辆的交互情况。
基于此,利用激光雷达和摄像头组成的交通数据采集装置,在长沙自动驾驶示范运行区域采集包含自动驾驶汽车Robotaxi和人工驾驶车辆的混合交通流运行特征的实车数据,通过图像识别和机器学习算法分辨不同目标物并统计车头间距、速度等数据,研究自动驾驶汽车的跟车特性及对前后车辆的影响。
2 混合交通流实车数据采集
2.1 采集设备
此次主要采集城市公开道路混合交通流中的自动驾驶汽车、人工驾驶汽车数据。利用一颗HESAI 64线机械式激光雷达和一颗海康工业摄像头组成交通数据采集装置,采集所有目标物的速度、位置、车头间距、尺寸等。
2.2 采集时间及地点
考虑到Robotaxi的运行规模和品牌分布选取长沙作为采集地点,环境信息、采集时间等。
3 混合交通流实车数据处理
3.1 采集前数据预处理
结合图像分析和机器学习的方法,将激光雷达的点云数据与摄像头的信息融合,考虑自动驾驶汽车与传统人工驾驶汽车最大的差异——自动驾驶汽车顶部安装的激光雷达及支架部分,从而筛选出自动驾驶汽车并标记。
3.2 分时段数据梳理
考虑到自动驾驶汽车Robotaxi运行时间避开了早/晚高峰时段,分别选取长沙工作日早平峰、晚平峰,及非工作日午平峰时段采集到的数据进行分析,将采集到的目标物分为人工驾驶小汽车、中型车及Robotaxi车辆。
按照JTGB01—2014公路工程技术标准的规定,将交通流数据中的小轿车和中型车,换算为标准小汽车。
4 混合交通流实车数据分析
4.1 基于车头间距的跟车特性分析
自动驾驶汽车Robotaxi受控制策略影响而呈现出不同的驾驶风格,人工驾驶汽车与自动驾驶汽车混行时会由于驾驶员的好奇/害怕等心理而接近/远离自动驾驶汽车,车辆的车头间距、速度、加速度等发生变化使得混合交通流呈现出不一样的交通运行特性。
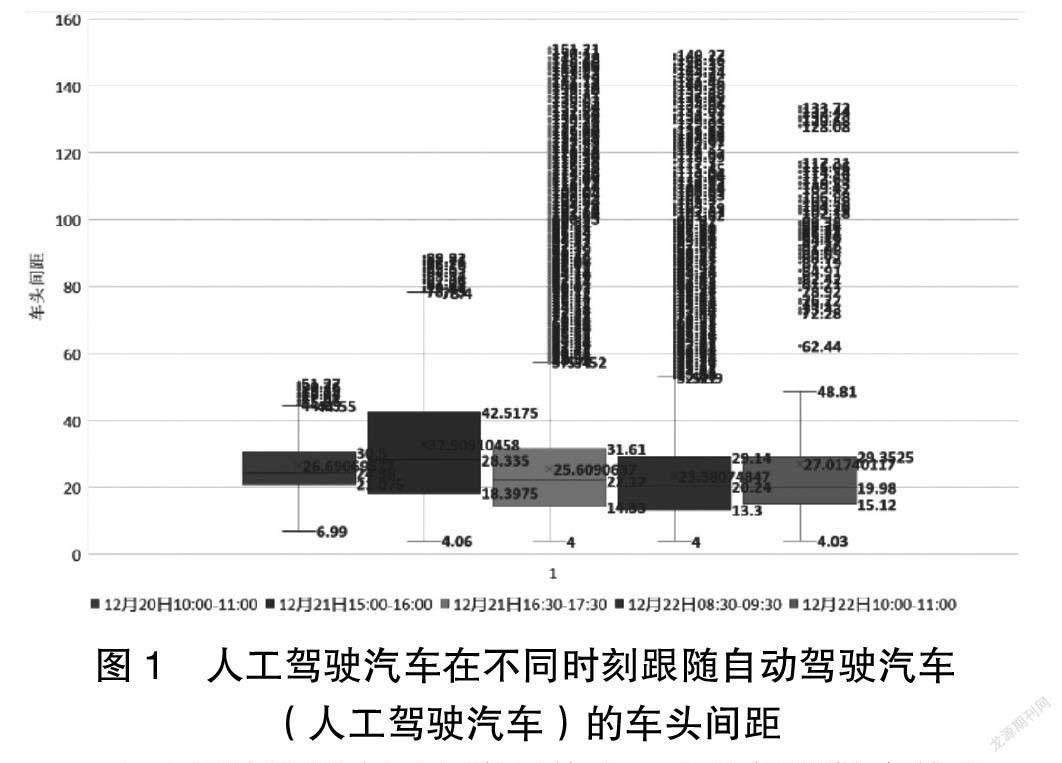
分别统计非工作日平峰、工作日晚高峰和工作日早高峰时段,人工驾驶汽车跟随自动驾驶汽车(人工驾驶汽车)的车头间距,以及自动驾驶汽车(人工驾驶汽车)跟随人工驾驶汽车的车头间距。由于道路采集设备架设在路边人行横道上,高度约2 m,与远方车辆形成一定的夹角,车头间距数据存在部分偏差。考虑到普通乘用车长度在3 800 mm以上,以及车辆运动过程中需保持一定的距离,故去除车头间距小于4 m的数据。
人工驾驶阶段由于车流量较大,车头间距散点较多,但大部分车辆的车头间距集中在小部分区域,驾驶员跟车较为紧密。
混合交通流阶段的车头间距平均值(12月20日10:00—11:00的26.69 m,12月21日15:00—16:00的32.91 m,12月22日10:00—11:00的27.02 m)均大于人工驾驶阶段(12月21日16:30—17:30的25.61 m,12月22日08:30—09:30的23.38 m)的平均车头间距,工作日晚平峰和工作日早平峰相较于相邻时段分别增加7.30 m和3.64 m。
人工驾驶阶段车辆跟车特性与前序分析相近,工作日晚平峰和工作日早平峰的车头间距平均值仅相差0.27 m和0.68 m,车头间距中位值仅相差0.50 m和0.67 m,说明人工驾驶阶段的交通流较为稳定。
混合交通流阶段的车头间距平均值(12月20日10:00—11:00的31.92 m,12月21日15:00—16:00的34.02 m,12月22日10:00—11:00的29.95 m)均大于人工驾驶阶段(12月21日16:30—17:30的25.34 m,12月22日08:30—09:30的22.70 m)的平均车头间距,工作日晚平峰和工作日早平峰相较于相邻时段分别增加8.68 m和7.25 m。自动驾驶汽车跟车阶段与人工驾驶汽车跟随自动驾驶汽车阶段相比较,车头间距平均值在非工作日平峰、工作日晚平峰和工作日早平峰分别增加了5.23 m、1.11 m和2.93 m。说明自动驾驶汽车的跟车策略较为保守,车头间距控制在较安全的范围内。
5 结论
(1)获取的中国道路实际运行情况的混合交通流实车数据,涵盖非工作日/工作日的早/晚平峰不同时段,弥补了国内混合交通流实车数据方面的空白。
(2)自动驾驶汽车周围车辆的微观运行特性分析表明,人工驾驶阶段的交通流运行较为稳定;混合交通流阶段,人工驾驶员跟随自动驾驶汽车趋向于保持更大的车头间距,而自动驾驶汽车跟随人工驾驶汽车时也会采取较为保守的控制策略,保持更大、更安全的车头间距。
未来,将在北京、广州等更多的自动驾驶示范运行区域采集交通流,得到更具有普遍意义的交通流模型;利用采集到的数据分析车辆间的横向运动,如切入/切出、不同车道间车辆间隙等;改进采集装置,消除或减小由于设备安装问题带来的测量误差。
参考文献:
[1]陈君毅,李如冰,邢星宇,等.自动驾驶车辆智能性评价研究综述[J].同济大学学报(自然科学版),2019(12):1785-1824.
[2]秦严严,王昊,王炜,等.混有协同自适应巡航控制车辆的异质交通流稳定性解析與基本图模型[J].物理学报,2017(9):257-265.
猜你喜欢
南风窗(2017年23期)2017-11-23
科技创新导报(2017年26期)2017-11-08
科学与财富(2017年28期)2017-10-14
中国计算机报(2017年22期)2017-09-16
山东工业技术(2017年15期)2017-09-05
中国科技术语(2017年3期)2017-07-10
汽车周刊(2017年5期)2017-06-06
中国科技纵横(2017年4期)2017-05-16
移动通信(2016年24期)2017-03-04
家用汽车(2016年9期)2016-11-04
