基于自动控制的两船并行航行自航模型测试平台
2021-11-05 14:57封培元范佘明
船舶 2021年5期
封培元 刘 义 范佘明
(中国船舶及海洋工程设计研究院 上海200011)
0 引 言
横向补给是海上补给的主要方式,对提高船舶的远洋生存能力具有重要意义。在横向补给时,通过跨接于两船之间的补给装备进行物资补给,该方式可补给的物种品种多,快速、高效,船舶之间的对接和脱离比较容易,可在较高的航速下作业。补给船与接收船保持同向、同速以一定横向间距并行航行,是横向补给作业对船体运动姿态的基本要求。
船舶运动控制系统是保持或改变船舶运动状态的重要手段,补给时重点关注的是两船能否保持期望的横向距离。过大的横向距离可能导致通过高架索传送的货物浸入海水中,过小的横向距离则可能产生船舶碰撞事故。实际补给过程中,补给船保持直航,接收船需要完成靠近、并行和离开等复杂操控运动。
船舶操纵运动控制系统属于欠驱动控制,只能通过螺旋桨、舵控制纵荡和转首方向运动,而横荡方向的运动控制须通过螺旋桨和舵间接控制。这使该系统具有强耦合性和高度非线性特征,是复杂的多输入多输出系统。在控制过程中,海洋环境的干扰以及补给任务的复杂性增加了舰船运动控制中的不确定性。复杂海况下的波浪、流、风等环境干扰作用于船体会产生慢漂力,造成舰船的偏航。这无疑增加了接收船的轨迹跟踪控制难度。此外,船舶的动力学特性会随着船舶参数的变化而变化,如质量、重心位置和吃水等,这些参数与船舶搭载的有效载荷大小、布放位置以及登船人员等因素密切相关。这也间接影响了船舶自动控制系统的控制效果,进而影响船舶横向补给的成败,因此,设计与开发可应对环境干扰、模型参数变化等不确定因素的控制器具有重要意义。
针对这一复杂问题,现有的关于并行航行控制的相关研究主要通过数值仿真的方式进行设计和控制效果验证。然而,考虑到船舶操纵运动的强非线性和海上横向补给作业环境的复杂性,仅通过数值仿真方式进行控制器设计无法保证其在实际应用中的效果,只有通过原理样机或实船试航等实物测试才能真正确保控制器的实用效果。
1 自航模型试验技术概述
相比于代价高昂且环境条件不受控制的实船测试,自航模型试验采用缩尺后装有桨舵的船模直接复现实船的操纵运动;利用试验场地的造波、造风和造流功能模拟出指定的环境条件。因此,借助自航模型试验手段可以使研究人员更为直观、高效、精确地对所设计的控制器进行参数调试和效果验证,已有诸多的成功应用案例。
哈尔滨工程大学利用船模实验对船舶适航性和操纵性进行分析研究,自航模的控制器采用AVR单片机 ATmega16,实现控制舵机、电机的功能。自航模采用 MTI 系统来采集姿态信息,MTI系统能够准确的提供自航模的航向和倾角信息。自航模与岸基系统的无线传输采用Zig-Bee 技术来实现,Zig-Bee 技术具有多个网络节点并且传输距离较远,可实现自航模的远距离控制。
麻省理工大学的研究人员针对DTMB 5415开展了自航船模操纵性测试。船模与岸基计算机通讯采用无线局域网来完成,通过增强天线,传输距离可以达到640 m。航模的位姿传感器采用了MicroStrain公司的3DM-GX3-45 GNSS辅助导航系统,其内部集成了GPS、磁力仪和加速度计,通过扩展卡尔曼滤波得到位置、速度、航向和姿态的最优估计。
挪威科技大学针对一艘直翼推进船的动力定位性能进行了研究,采用NI公司的RIO9024进行数据采集和控制。通过红外相机跟踪船模上的标记来获得船模的位置和航向,并通过以太网实时传递到控制计算机。
海军工程大学在湖泊中开展了两船横向补给的自航模型试验研究,利用GPS信息采集两船的位置信息,通过船模上的自动控制系统进行操舵,实现两船相对位置的自动保持。该试验在天然湖泊中进行,因此环境条件不可模拟。
借鉴已有的研究,本研究团队针对海上两船横向补给作业时并行航行状态下的自航模型试验需求,专门研制了一个基于自动控制的两船并行航行自航模型测试平台,建立起了在水池中开展船模并行航行控制的自航模型试验方法。
2 测试平台说明
本测试平台研制包括:总体框架构建、光学测量系统数据采集、自航船模及桨舵研制,船基控制系统(下位机)和岸基控制系统(上位机)的研制,并行航行自动航行控制程序的研制,以及整个测试平台的最终集成和调试;
并行航行自航模控制系统包括岸基部分和船基部分。岸基部分主要是采集光学传感器的信息,从而获得航模船的各种姿态信息,这些信息通过岸基控制系统处理后,传给运算控制单元,通过解算船模的姿态信息,经过自适应算法得出模型船的推进器控制量和舵角的控制量,再回传给岸基控制系统,岸基控制系统通过无线模块将这两个控制量传给船基的控制单元,船基控制单元再通过网络传给驱动控制单元,完成推进器和舵机的控制。船基控制单元同时也采集驱动单元的舵角、转速等信息,反馈给岸基控制单元进行显示。
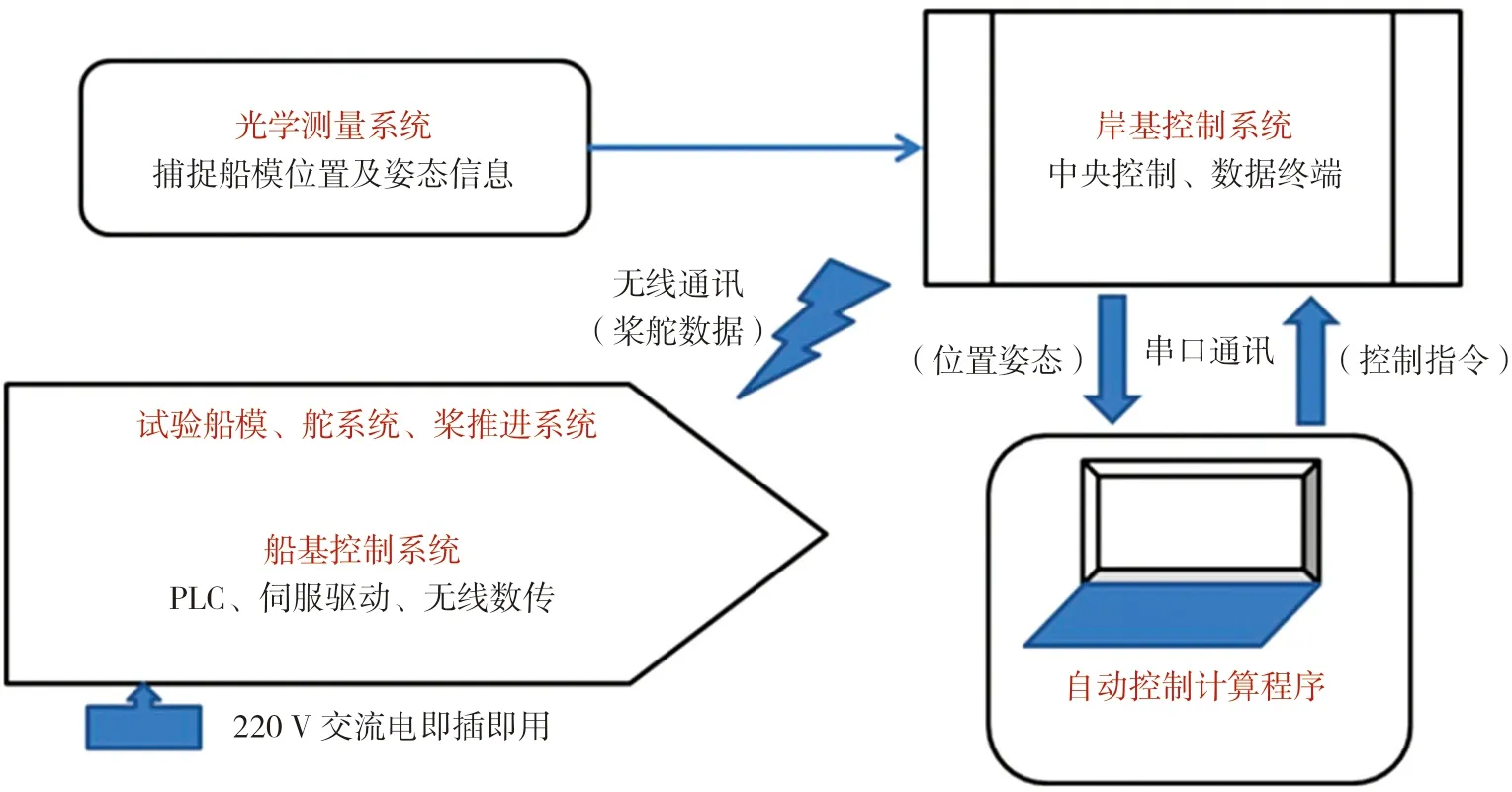
图1 测试平台系统构成
2.1 光学测试系统
本平台所采用的是瑞典Qualisys公司生产的运动捕捉系统。该光学系统使用了独特的高速数码相机来精确捕捉带有主动或被动标记点的可测量物体的运动。利用该技术可以准确、可靠并实时将捕获到船模的位置和姿态信息。
系统所采用的光学镜头如图2所示,一般在试验时根据精度需求安装约3台镜头。镜头数量越多则测试精度越高,但对应可观测的船模运动范围会有所减小,因为只有全部镜头视野的重叠区域才能进行数据解算。
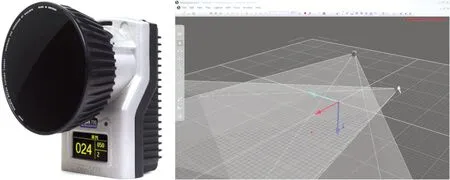
图2 光学测量系统相机及QTM软件
QTM是Qualisys特有的跟踪软件,用于和Qualisys相机进行结合。用户可以使用该系统实时地进行2D, 3D和 6DOF运动的捕捉,将延迟降到最低。QTM 以先进的数据运算法则为基础,确保了高速、高准确和低延迟特色(最低延迟 6 ms)。利用该系统所能达到的测量精度一般可以保持在位移1 mm和角度0.1°以内。
2.2 船基及岸基控制系统
控制系统硬件主要由两大部分组成:一是岸基控制系统部分,即控制台部分;另一个是放置在模型船上的船基控制系统部分,即遥控单元部分。
控制台是进行整个控制系统操作、控制以及显示的主要载体,它主要包括控制台面板和控制柜体两大部分构成。
如图3所示,控制台面板部分包括一体化控制计算机、航行和航向操作控制单杆、使能和运行按钮、电源指示灯、模式选择开关和应急按钮以及控制台端无线天线等;控制柜体主要包括直流电源和操作控制单杆所需要的电源、采集模块、无线电台模块、以太网交换机、串口服务器、空气开关和必要的接线端子等。

图3 岸基控制系统(控制台)
控制台软件的主要功能是综合显控与数据中转。来自船基遥控单元的反馈数据和光学测量服务器的数据,经控制台软件解析后进行本地显示及存储,并转发给控制计算机。控制计算机生成的控制指令发送到控制台软件后,由控制台软件解析后进行本地显示及存储,并转发给船基遥控单元。如下页图4所示,控制台软件的主要功能模块包括航迹显示、船模信息、操控信息、可编程逻辑控制器(Programmable Logic Controller,PLC)远程控制、光学传感器数据采集、数据存储和通信状态指示等。控制台软件与系统中其他单元连接后,实时指示当前对应单元的通信状态。船模操作模式自动、手动、远程可选,手动模式下控制量可由操纵杆给定或键盘输入,实现舵角和桨速的精确控制。数据记录功能将实验过程中涉及的所有数据和操控信息保存为EXCEL文件。PLC远程控制主要实现船基遥控单元的启停和运行状态指示,同时可进行船基单元的远程复位。航迹显示功能将实时显示船模在光学坐标系统中的位置,并叠加显示艏向信息。

图4 控制台控制系统软件界面
船基的遥控单元用于模型船上控制信号的采集和推进器、舵机控制信号的输出以及接触器、指示灯信号的控制输出。遥控单元上要采集的信号主要为罗盘信息,舵机及推进器的角度和速度信息,并接收岸基控制台单元的命令,将控制信号的输出传给驱动单元用于舵机和推进器的控制,以及伺服驱动单元的使能、运行命令的接收等。遥控单元主要由多个PLC模块构成,其中最为重要的是轴定位模块,通过PLC编程完成舵机的回零操作,同时完成舵机和推进器的同步控制。遥控单元及遥控单元内部构成见图5。
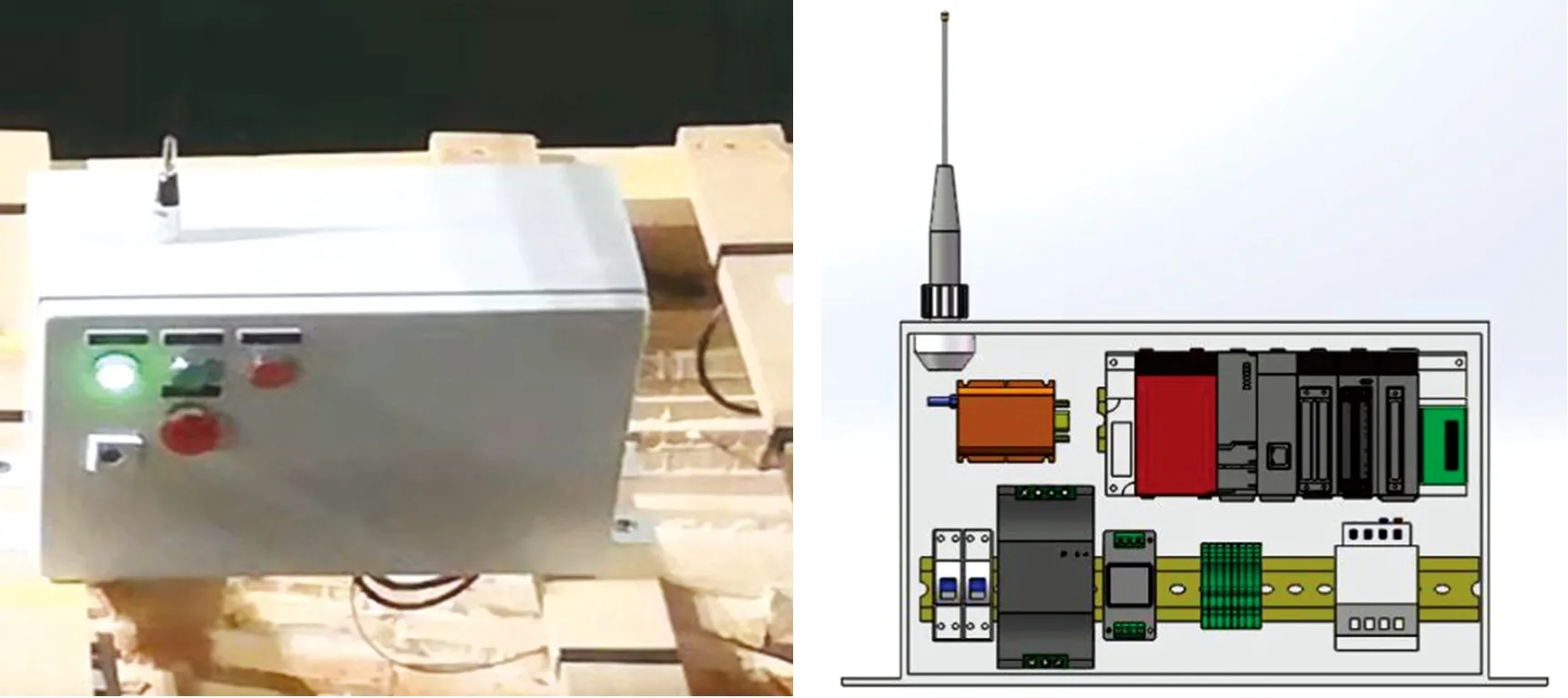
图5 船基控制系统(遥控单元)
2.3 控制软件
船舶操纵运动自动控制软件界面如下页图6所示。软件采用Matlab语言编写完成并制作了专门的操作界面。
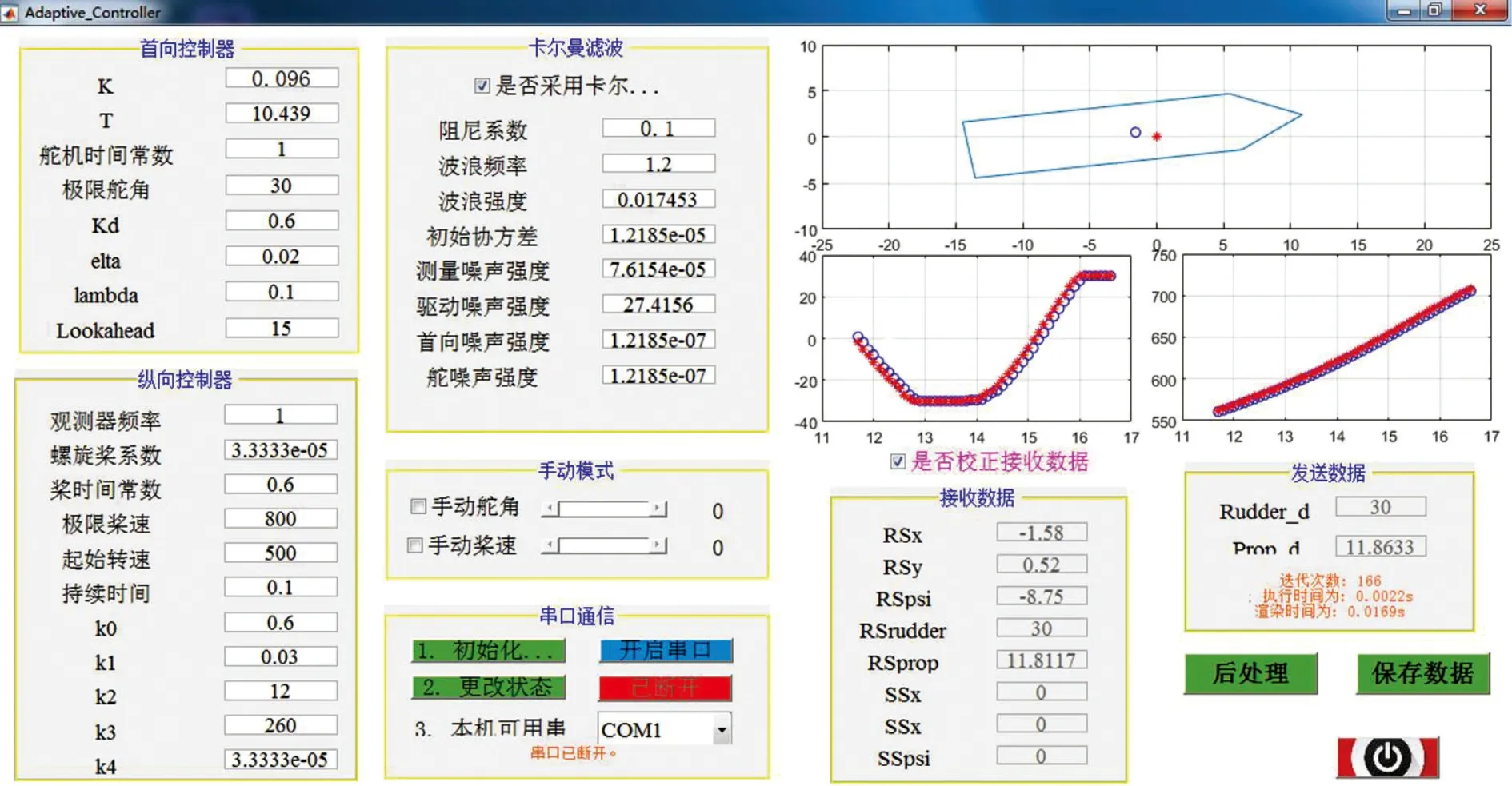
图6 控制软件界面
通过该软件可以方便地调节控制器和滤波器的参数,并能实时显示并绘制船模的当前位置及航向。在每次试验结束后,可通过图7所示的后处理界面直接对试验数据进行处理。

图7 测试结果后处理
该控制软件通过串口通讯方式与工控台进行通讯,实现了硬件和软件间的独立。这样有利于知识产权的保护,便于多家单位间协同合作和不同控制算法间的横向比较。
3 应用实例
在MARIC拖曳水池中应用该测试平台开展了两船并行航行自航模型试验。下页图8为接收船的试验模型。从中可以看出,所研制的系统具有很高的集成度,船模上的设备非常精炼,只要将3个控制箱固定在船模上,再完成与舵机和推进电机间的连线即可。

图8 试验船模
船模上也无需其他任何的姿态和位置传感器,只需固定几个小型光球就能通过光学系统实现数据采集。
针对迎浪不规则波工况开展了模型试验研究。如图9所示,即使遭遇5级海况,接收船模在控制程序的自动操控下也能较好地保持与补给船间的相对位置。

图9 并行航行自航模型试验照片
4 结 语
本文所阐述的基于自动控制的两船并行航行模型测试平台具有集成度高、系统稳定可靠的优点,并且通过串口通讯方式实现了硬件终端与航行控制软件间的分离。这样有利于知识产权的保护,便于多家单位间的协同合作和不同控制算法间的横向比较。
该测试平台不但能够高效、可靠地实现控制器的参数调试和效果验证,还可以针对船舶典型的作业状态,对不同风浪流环境组合下两船运动状态进行实际测试,评估横向补给作业的安全性。