适用于船舶直流区域配电网的保护方法研究
2021-11-05 14:57张平
船舶 2021年5期
张 平
(海军装备部驻上海地区第八军事代表室 上海200011)
0 引 言
直流区域配电网是交直流混联型电力系统的重要中间网络,对全船电能的分配优化和提高船舶生命力具有重要意义。船舶直流配电网在网络拓扑结构上与交流配电网类似,具有辐射状、环状和区域配电网等多种拓扑结构。直流配电网通过逆变电路为交流负载供电、直接或通过斩波电路为直流负载进行供电。在中低压直流配电中,直流配电技术具有稳定性高、线路损耗小、便于小型分布式能源接入等优点。直流配电网目前多用于工业园区、轨交、船舶等领域的供电。其中直流区域配电网是主要适用于船舶供电领域的直流网络,属于相对独立的电力网络。
目前,在船舶和航空等独立供电领域实际应用的直流配电网主要为辐射形和环形配电方式,在保护策略方面,研究与应用较多的有:过电流定时限保护、差动保护、智能算法保护、基于单端电气量的无通信保护。
(1)过电流定时限保护
小型独立电力系统目前仍然采用按照电流与时间原则进行断路器保护的整定,保护虽然简单易实现,但是按照时间原则,越靠近上级线路的保护开关延时时间越长,有可能使故障类型向更严重的程度发展,危害电力系统。针对过电流定时限保护的缺点,张芳等提出通过比较本端故障电流的变化来判别对端断路器的动作状态,再按照时限特性加速启动本端保护的方法,很大程度上减少了保护的延时时长。刘华臣等提出在保护中加入逻辑单元,利用断路器输出开关量逐级传递代替时间原则,将过电流定时限保护作为后备保护,保证了保护的快速性与可靠性。
(2)线路纵联差动保护
直流线路与交流线路的线路纵联差动保护原理相同,都是基于基尔霍夫电流定律,通过对被保护线路两端测量到的电流幅值、电流方向、功率方向等电气量进行比较来进行故障定位,主要采用基于电流量的差动保护。线路差动保护不受系统运行方式的影响,可靠性与速动性很高,在陆用电力系统的保护中得到广泛应用。但是远距离输电线路对通信条件有一定的要求,经大电阻接地时保护的灵敏度也会降低。
在船舶这种独立电力系统中,输电线缆很短,配置线路差动保护十分方便,尤其是在船舶电力系统较复杂的情况下,纵联差动保护具有优良的选择性。范继伟等在此基础上提出以广域差动保护为后备保护的方案,实现电网任意两测量点间的差动保护,构成嵌套式保护。李斌等提出利用暂态极性制定保护方案,通过比较被保护线路上线路两端电流暂态极性的相关性实现故障定位,比较适用于含有多个分布式电源的电网。在实际应用中,通信实时性、互感器饱和、轻微故障下保护拒动等问题等成为差动保护实现的难点,在交流电力系统中已有故障分量、补偿电容等解决方法,而对于直流线路,这些问题仍有待探究。
(3)基于智能算法的保护
近年来,越来越多的智能算法也逐渐应用于直流配电保护,能较好实现故障定位与切除,并调整网络拓扑结构。目前研究最多的为自适应保护算法。自适应保护是一种能根据电力系统拓扑结构和故障状态的变化而实时改变保护原理、特性以及定值的保护方法,从而使保护装置能快速适应电力系统在运行过程中发生的各种变化。目前自适应算法主要在传统保护的基础上作出改进,包括自适应电流速断保护、自适应电压速断保护、自适应过电流保护、自适应电流向量纵联差动保护、自适应距离保护等。自适应保护能克服同类型传统保护长期存在的难题,体现出强大的优越性。除自适应算法外,还有许多关于神经网络算法的研究。Li W等利用小波多分辨分析和Parseval定理对不同故障特征进行了提取,选择不同分辨率的故障信号能量变化作为特征向量,并利用神经网络系统进行中压直流船舶电力系统故障检测与分类。陈中孝等在专家系统和神经网络两者相结合的故障诊断方法的基础上,把各个混合型直流断路器的工作状态作为专家系统的采样输入数据,各个短路点的断路器动作时刻的电流信号作为 BP 神经网络的样本输入数据,实现了对短路故障进行诊断与拓扑重构。
智能算法保护系统的可靠性较高,对各类电力网络的适应性极高,值得进行进一步的探究。但其需要以完备的通信系统为基础,对通信依赖较高,其对船舶直流区域配电网的适应性需视实际应用情况而定。此外,智能算法保护系统较为复杂,目前尚处于理论研究阶段,仍需大量的实验与仿真论证。(4)基于单端电气量的无通信保护
无通信保护往往只需要单端电气量便可以进行故障定位,实现全线相继速动。目前国内外学者对交流线路的无通信保护已有较多研究,如基于单端电流电压工频分量的零序分量保护、电流突变量保护,基于暂态分量的边界保护、行波保护等。对于独立电力系统,很少有关于单端电气量的无通信保护。这种类型的保护避免了对通信的要求,在某些通信环境条件恶劣的独立电力系统中有较高的可靠性。该类保护对于不对称故障能可靠、快速动作,但无法正确反映对称故障。
目前关于船舶直流区域配电网保护的研究尚不成熟。本文主要探究适用于船舶直流区域配电网的保护方法,根据船舶直流区域配电网络运行特点,研究分析常见直流线路保护方法在直流区域配电网保护中的适应性,并得出电流差动保护、电流变化率+电流变化量相结合的电流突变量保护有着较好的适应性的结论。
1 船舶直流区域配电网的拓扑结构与运行特点
船舶直流区域配电网络是由电力电子变流器、配电装置、直流电缆和用电负载等组成的配电网结构,一般在船舶的两侧配置左舷及右舷两条主汇流母线,含有多个配电分区,各个分区内均含有供电单元与负载单元,使电能传输网络的区域分配最大化。一种船舶直流区域配电网络的拓扑如图1所示,其中ZONE 1- ZONEn
代表n
个配电分区。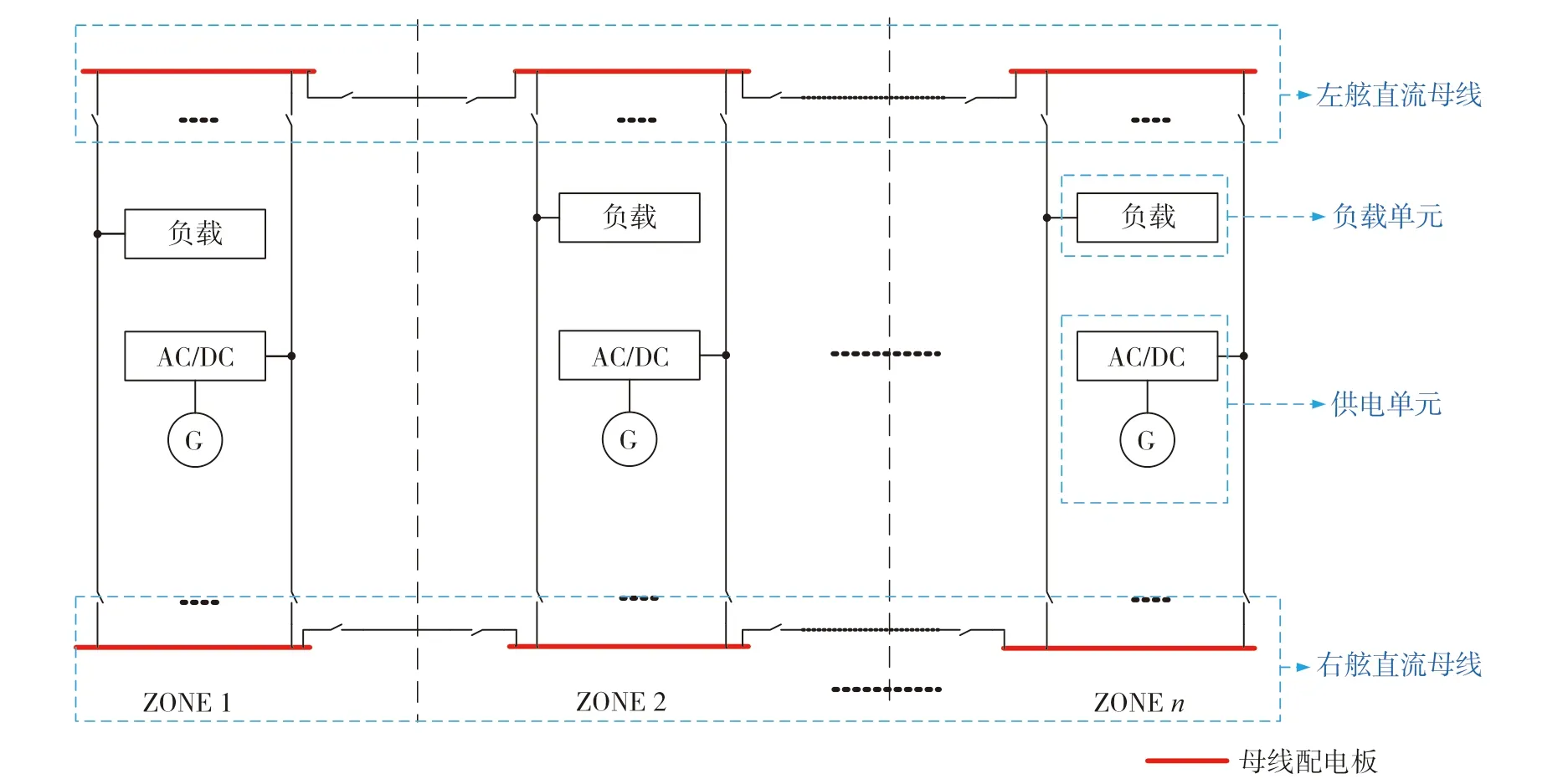
图1 船舶直流区域配电网拓扑图
在图1中,左右直流母线一般按照左右船舷对角交叉布置。每个配电分区内都有供电单元(即直流区域配电板模块)与负载单元,左右舷上各有n
个获取电能与分配电能的直流舷侧配电板。每个供电单元均通过直流舷侧配电板与左右舷母线相连,由此向左舷或右舷直流母线供电。供电单元通过电力电子变流器从上级线路获取电能。一般情况下,直流区域配电网处于低压水平,需要从中压直流电网中获取电能。
每个负载单元均与其区域内的舷侧配电板相连,可以从左舷与右舷直流母线同时获得电能。这样当某一舷侧发生故障时,另一侧舷仍然可以继续为负载供电。
由图1可知,左右舷之间互相隔离,当某一舷发生故障时,非故障舷能够继续为负载进行供电,以保证供电连续性;当局部发生故障时,能够迅速调整区域网络拓扑结构,并优先保证重要负荷的供电。此外,这种网络结构克服了船体的封闭性、耐压性等问题,为船体节约了空间,也相应提高了发电机组的工作效率,体现出更优越的性能。
为实现左右舷之间的隔离,1个供电单元最多能选择1条舷进行供电,即根据实际供电需求的不同,运行工况有多种情况:
设S
…S
S
表示低压直流区域配电网的运行状态。并规定:
S
…S
S
取值有2种可能。其中所有供电单元均与左舷母线或右舷母线相连这两种情况为单母线运行工况,其余情况均为双母线运行工况。由此可见,直流区域配电网的实际运行工况很可能是实时变化的,这为保护方案的考虑带来困难。此外,为实现直流与交流的转变,船舶直流区域配电网含有大量的有闭锁功能的电力电子器件,这也为保护方法的选取带来困难,在制定船舶直流区域配电网的保护策略时需要对上述两种情况予以考虑。2 适用于船舶直流区域配电网的保护方法
不同于交流线路,直流线路有两种故障类型:单极接地故障、极间短路故障。对于单极接地故障,非故障极电压会上升为接近于原来的2倍,故障极电压降为接近于0;对于极间短路故障,正负极电压均降为接近于0。
前文已经提到,目前船舶直流电网中主要应用的保护方法包括:过电流定时限保护、纵联差动保护、基于单端电气量的无通信保护。基于智能算法的保护目前大多处于理论研究阶段,且对通信条件要求较高,不适用于运行环境恶劣的船用直流配电网。另外,由于船舶直流区域配电网网络拓扑较复杂,利用电压量过高或过低构成的保护仅能起到辅助选极的作用,难以进行故障定位、构成单独保护。
2.1 过电流定时限保护
过电流定时限保护是目前最常用的保护方式,其与传统交流电网的过电流定时限保护原理类似。发生短路故障后,当电流幅值首次大于保护开关的整定值时,保护就会启动,在延时的时间段内,电源馈送流过保护开关的电流值应该持续保持在整定值之上,则保护装置判断为短路故障,从而发出跳闸信号。若中间任一时刻电流值小于整定值,保护将返回。此保护方法主要用于切除线路远端处短路的故障,也常作为下一级线路的后备保护。
船舶直流区域配电网属于双向潮流网络,过电流保护需要与方向元件相配合,保护安装处流过的电流方向一般选从母线到线路为正方向,如图2箭头所示。

图2 过电流定时限保护—电流正方向示意图
定时限的选取通常按照从最后一级线路向上级线路逐级递增的原则进行。即定时限时间t
>t
>t
;t
>t
>t。如下页图3,发生故障F
后,CB1、CB3、CB6处由于流经保护处电流方向为负,保护不启动。CB2、CB4、CB5处检测到正向过流,保护启动,CB4延时t
后动作、CB5延时t
后动作,将故障切除,CB2返回。因此,直流区域配电保护应具备方向性。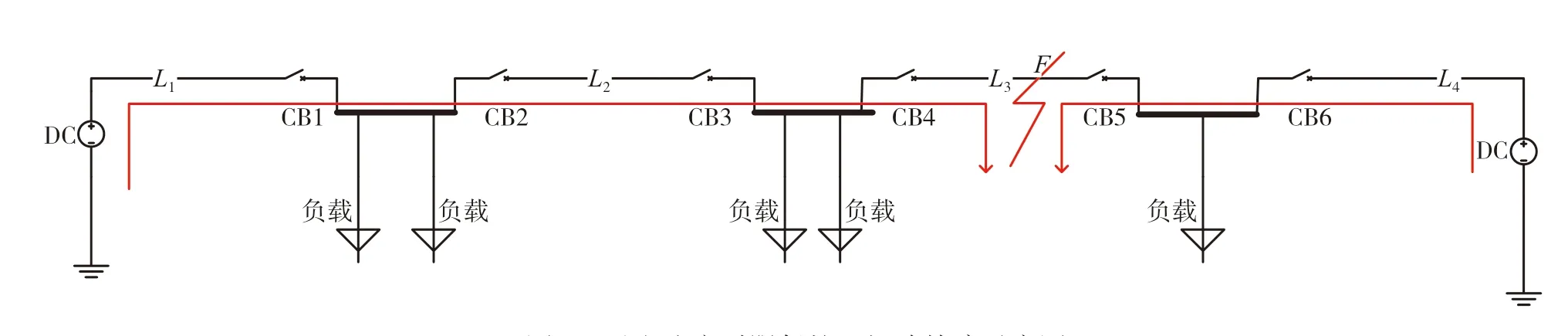
图3 过电流定时限保护—短路故障示意图
船舶直流区域配电网中的电力电子器件在外部发生短路故障后的一定时间内(数十毫秒)会闭锁,以防止短路故障对电力电子器件造成损害,这一时间往往较短。因此,直流线路故障发展至稳定状态需要的时间通常大于闭锁时间,显然定时限过电流保护无法满足在闭锁时间内将故障切除。
这种保护方式不能作为主保护,但其定时限原理可以应用于直流区域配电网的后备保护中,这需要选取很小的时限阶梯,但时限阶梯过小会造成整定值难以整定,为此需要寻求其余可行的保护方法。
2.2 纵联差动保护
目前应用最多的纵联差动保护包括:电流纵联差动保护和方向纵联差动保护。其中,电流纵联差动保护利用被保护区域端口流过的电流差值构成保护判据;方向纵联保护主要利用被保护区域端口的电流或功率的方向构成保护判据。此外,也有关于暂态故障分量的差动保护,主要是利用被保护区域端口处的暂态故障电流极性间的相关性构成保护判据。
2.2.1 电流纵联差动保护
电流差动保护的基本原理是比较被保护设备各引出线上的电流,在发生区内故障时电流差动值极大,而正常运行条件下或发生区外故障时电流差动值接近于0。
假设某一段被保护线路两端测量得到的电流分别为I
、I
,则差动电流由式(2)决定:
I
为差动电流,A。当发生区内故障时,差动电流满足判定式(3):

I
为差动电流整定值,通常根据实际电路参数进行整定,A。而对于区外故障或正常运行的工况,差动电流I ≈
0,从而保护闭锁。下面对这一保护作出具体说明。电流差动保护下的短路故障示意图见图4和下页图5,其中电流的正方向选取为母线流向线路。
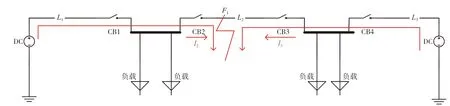
图4 电流差动保护下的短路故障示意图1
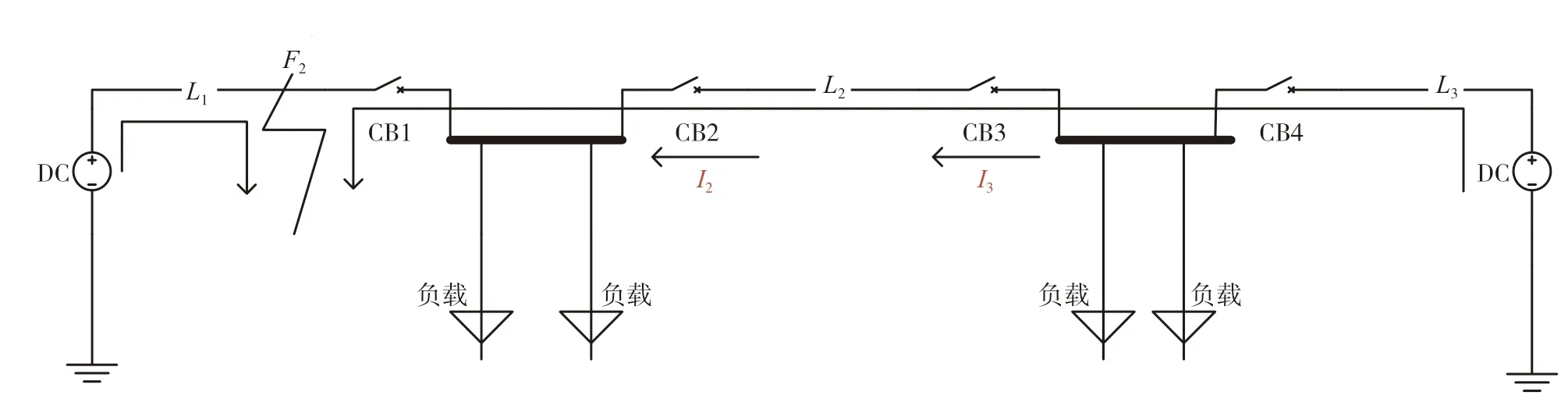
图5 电流差动保护下的短路故障示意图2
差动保护与系统短路电路水平无关,通用性很强,并且船舶直流电力系统越复杂,该方法的优势越明显。在区域直流配电网的拓扑结构下,虽然可能会出现类似于方向纵联保护中存在的问题,但电流差动值是各被测量端口电流值之和,差动值仍然存在,能够较好地克服多种运行工况为保护带来的困难。电流差动保护对通信依赖程度较高,但是在船舶直流区域配电网这种小型电网的环境下,可以直接配置引线得到电流差动值,从而避免对通信的依赖。
2.2.2 方向纵联保护
直流线路的方向纵联保护与交流线路类似,通过流经方向元件处的电流方向进行故障定位。用于直流线路的保护时,无需判断是否发生过流,但需要依赖于通信进行线路两端电流方向的比较。此方法多用于直流母线上发生短路的情况,方向元件的正方向一般选取从母线到线路为正方向。
下面以线路L
的保护为例介绍方向纵联保护。其中线路L
的两端配置的保护分别为CB2、CB3,因此需要分析CB2与CB3的配合情况。区外和区内分别发生短路故障的电流流向如图6、图7所示。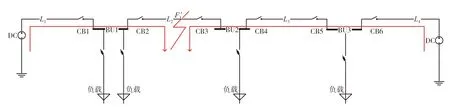
图6 方向纵联保护下的区外短路故障示意图1
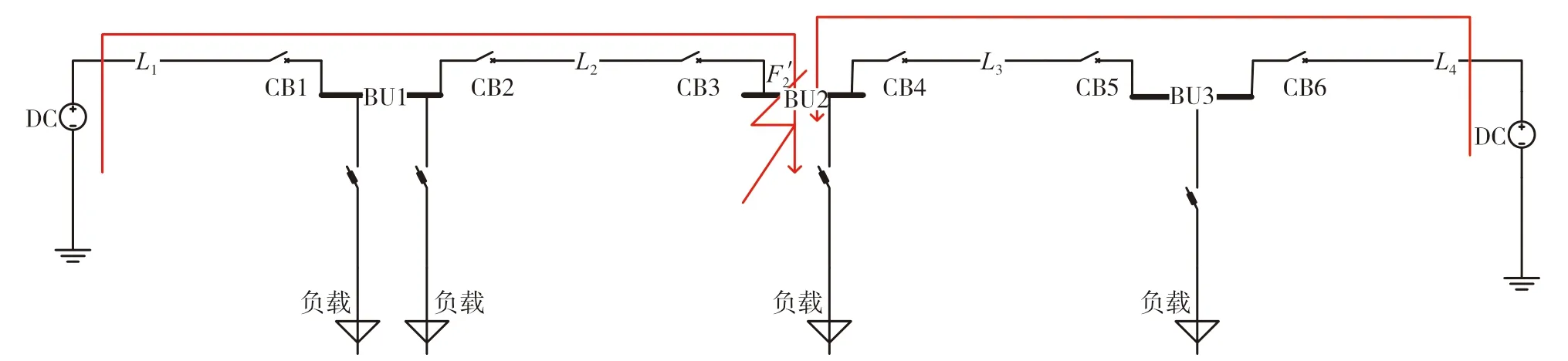
图7 方向纵联保护下的区内短路故障示意图2
如图6,当发生故障F
′时,CB2、CB3上均判断发生过流,而且CB2、CB3上方向元件判定电流方向均为正,由此确定区内发生故障,保护动作。如图7,当母线BU2上发生短路故障F
′时,CB2、CB3上判断发生过流,此时CB2上方向元件判定电流方向为正、CB3上方向元件判定电流方向为负。同理可得,只要不是在线路L
上发生短路故障,CB3、CB4上的方向元件判定结果总是一正一负,这样在正常运行状态下或区外发生故障时保护不会启动。方向纵联保护应用于直流区域配电网时有一定的局限性。一方面,方向纵联保护需要一定的过电流量配合,整定值难以选取;另一方面,某些运行工况下保护存在拒动的可能,例如在ZONE 2的供电单元为左舷供电,其余区域的供电单元均为右舷供电的运行工况(见图8)下发生故障F
时,断路器CB1上不会产生短路电流,这是因为ZONE 1内的供电单元此时仅向右舷供电,线路L
左侧不会有向短路点提供短路电流的供电单元,方向纵联保护无法做出正确判断,保护拒动。对于方向纵联保护,可以考虑进一步研究改进方法,使其适用于船舶直流区域配电网。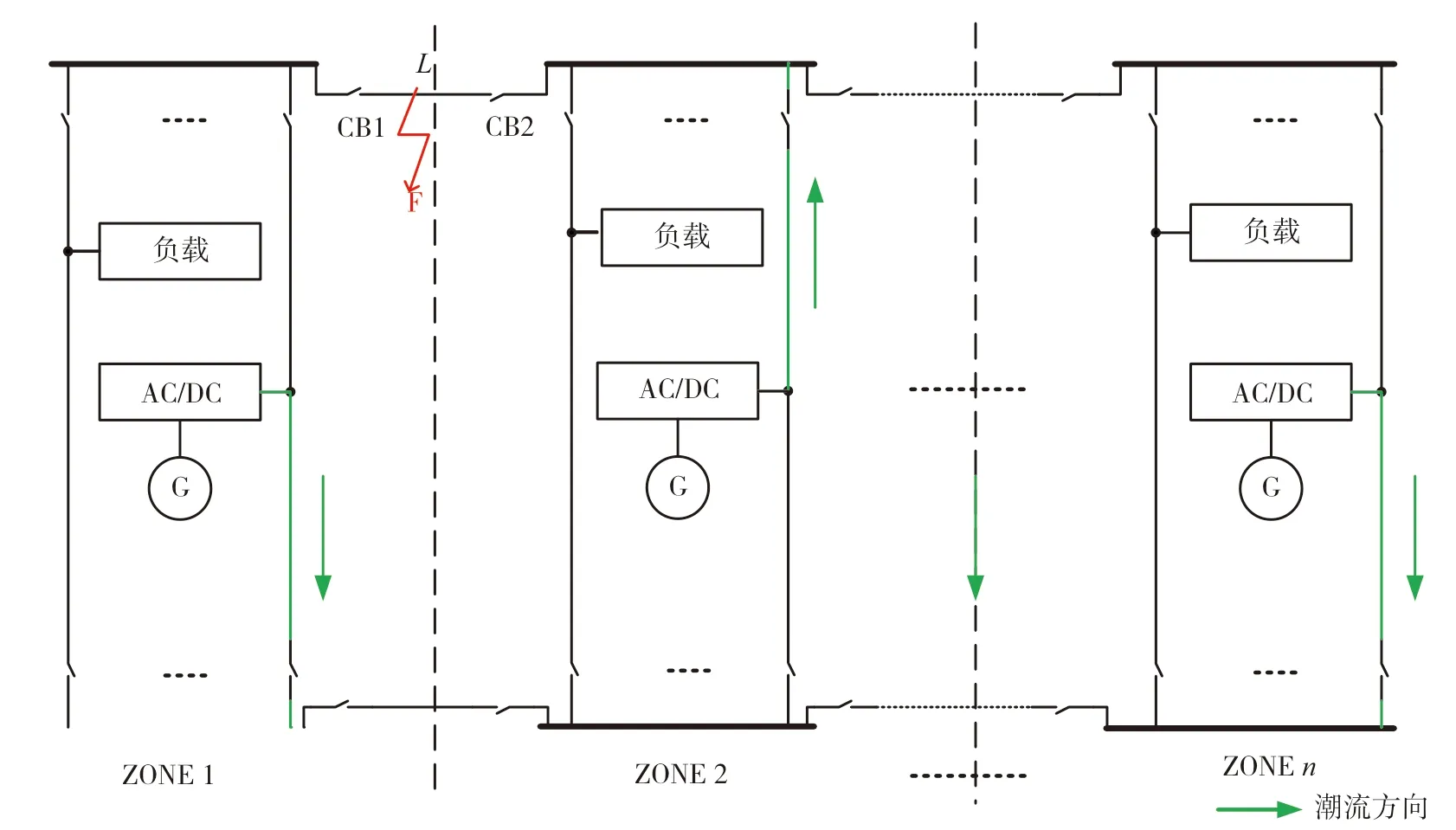
图8 只有ZONE 2内的供电单元为左舷供电时的潮流方向
2.2.3 暂态极性保护
暂态极性保护是一种适用于含有多个分布式电源电网的利用暂态故障信息的保护。故障暂态分量包含着丰富的故障信息,包括故障类型、故障地点和故障持续时间等。故障产生的高频暂态量在频域中遍布整个频谱,反映的是电网自身的故障暂态特性,与系统两侧电源种类和容量无关。因此暂态极性保护对于含有多个电源的区域电网有着很好的适用性。
通过比较被保护线路上线路两端电流暂态极性的相关性可以实现故障定位。电流的正方向通常选取为母线流向线路。暂态电流信号高频分量极性用互相关函数的概念来对两个暂态信号的相似程度进行描述。暂态极性保护下的故障示意图见图9和下页图10。
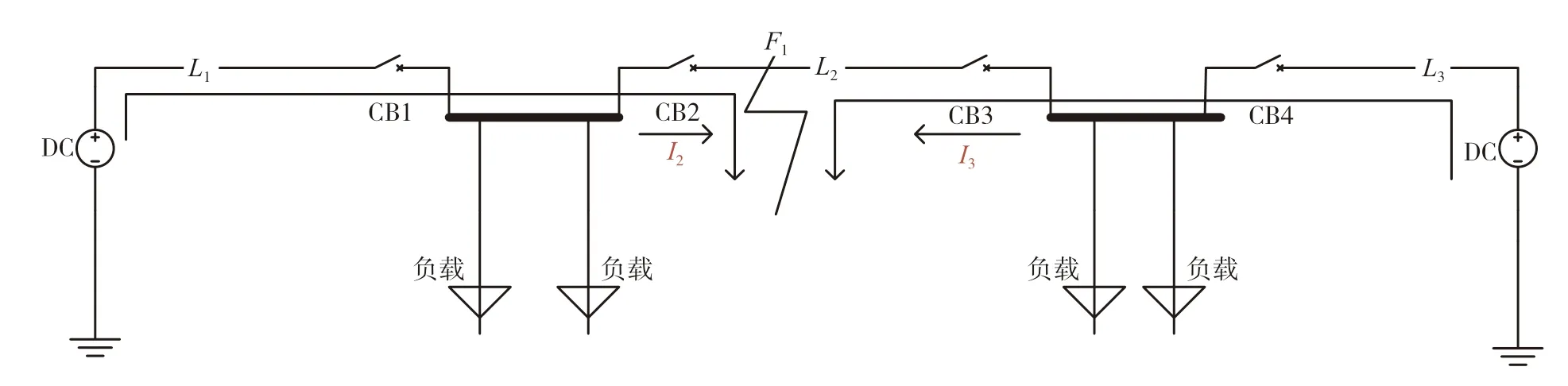
图9 暂态极性保护下的故障示意图1
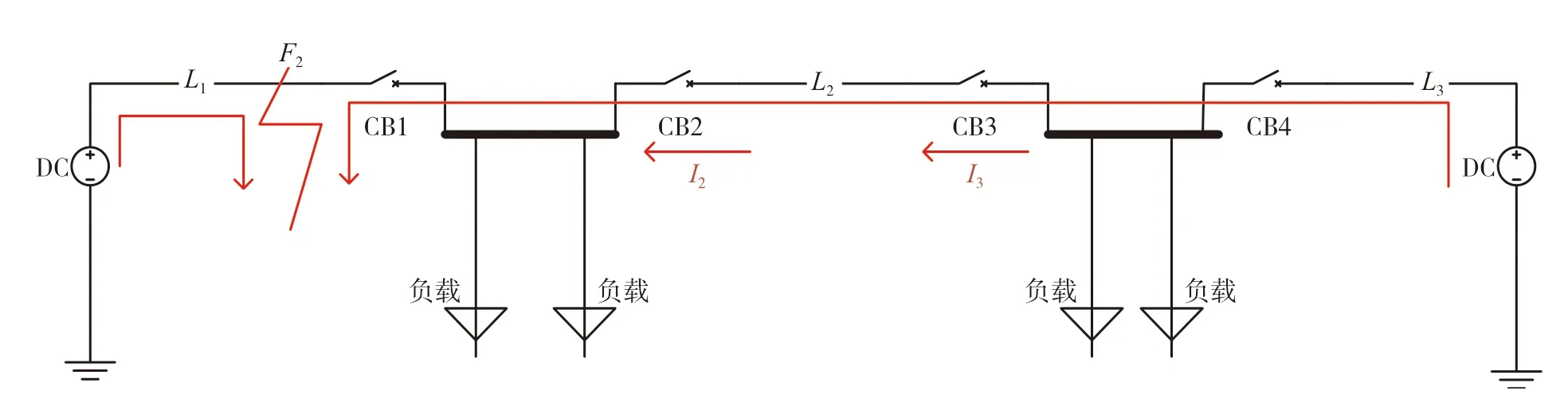
图10 暂态极性保护下的故障示意图2
以线路L
上的两侧的电流为例,人为定义I
(t
)与I
(t
)两者的互相关函数定义如下: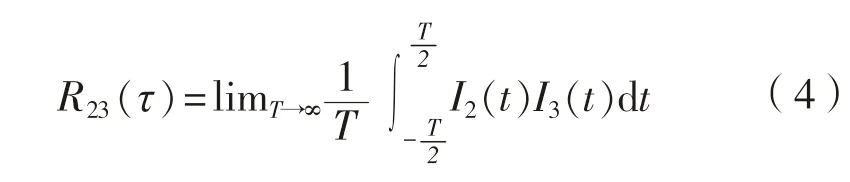
T
为积分区间。
虽然暂态极性保护能够克服分布式电源容量对保护的影响,但类比方向纵联保护可知,由于直流区域配电网的灵活性,理论上存在多种的运行工况,暂态极性保护同样存在一定的局限性。参见图8,当某一舷上仅有1个供电单元进行供电,且在该侧舷上发生短路故障时,仅有1个供电单元对故障点馈入短路电流,这样仅有1端线路存在暂态电流,无法构成保护的判别,或得到不相关的判定结果,造成保护拒动。
2.3 单端电气量保护
对于船舶独立电力系统,单端电气量保护目前仍以理论研究为主,但因其不需要通信,具有一定的研究价值。在陆用电力系统中,最主要的单端电气量保护为边界保护与行波保护。边界保护需要在线路两端添加边界元件(以电抗器为主),利用故障发生时电抗器两端故障暂态高频分量的差异来实现故障检测与定位。但是边界元件的存在使得电网结构复杂化,不适用于船舶直流电网等小型配电网络的保护上。行波保护是比较被保护线路两侧故障电流、电压的第1个行波波头正负极性而作用于跳闸的继电保护。但是,行波保护多用于远距离高压直流线路,同样不适用于船舶直流区域配电网。
除以上这两类保护外,与二极管相关的保护、电流突变量保护在船舶直流电力系统中可以达到较好的效果。二极管可以隔离故障线路与非故障线路,从而简化整体保护方案的设计;电流突变量保护无需额外的边界元件,且不会增加电网的复杂性,保护可靠性很高。
2.3.1 利用二极管隔离故障
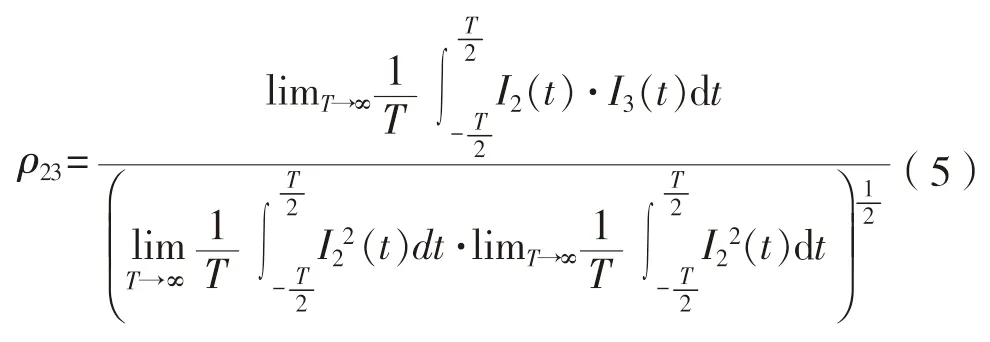
对于直流线路,可以应用反并联二极管将故障线路与故障的上级线路隔离开来,这在很大程度上简化了保护的难度。以下页图11所示的电路为例(二极管朝向与潮流方向一致),当F
处发生短路故障时,二极管将线路L
与线路L
隔离开,这样线路L
及其上级线路可以不受故障影响继续保持正常运行。
图11 带二极管的直流电路图
但是,对于分布式多电源的配电系统,其电力网络拓扑结构可能会发生变化,因此需要配置反并联二极管,反并联二极管要随着网络拓扑结构与潮流方向的改变随时调整接入方式,这反而提高了电力系统的复杂性。
利用二极管只能简化网络的保护方案。但是对
于直流区域配电网,应用二极管可以更好地实现左右舷的隔离并提高负载的连续供电性。前面已经提到,供电单元部分通过只为一个舷侧直流母线的供电方式将左右舷隔离。然而,如果负载侧仍使用这种方式隔离左右舷,也将降低负载的供电连续性,因为与故障舷相连的负载必然会经历一段失电时间,才能转移到非故障舷上继续获得电能或就此退出运行。如果在负载单元端口处串联二极管,则负载能够同时从左舷与右舷上获取电能;如果某一舷发生故障,负载仍可从非故障舷持续获得电能,二极管能将左右舷隔离以防故障传至非故障舷,从而大大提高供电连续性。
2.3.2 电流突变量保护
电流突变量保护是利用故障瞬间与电流量相关的突变量进行保护。最常应用的为电流变化量+电流变化率相结合的保护。直流电网在电源出口处往往配有电容值很大的并网支撑电容。故障后电容放电电流表达式见式(6):

U
为正常运行工况下的直流电压,V;C
为支撑电容值,F;R
=R
+R
,其中R
为线路等效阻抗,Ω;R
为故障过渡电阻,Ω。短路故障时并网电容放电瞬间会产生极大的电流变化率,并在故障后的一定时间内存在较大的电流变化量。
电流变化量与电流变化率相结合的保护流程图见图12。
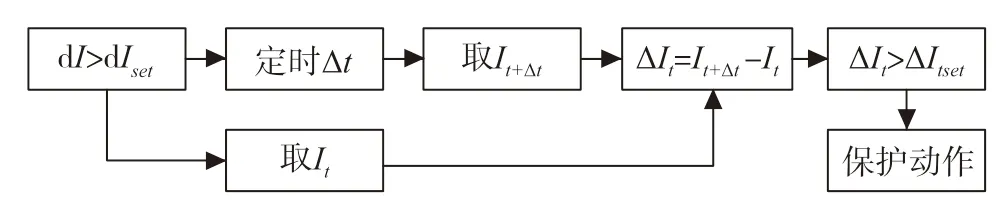
图12 电流变化量+电流变化率相结合的保护流程图
此保护方式是监测保护处电流变化率dI
,并有故障判据式(7):
I
为电流变化率整定值,A。若式(7)满足,则保护启动并延时一段时间Δt
,延时时间Δt
结束时的流经保护的电流增量ΔI
为:
I
为保护启动时测量的电流值,A;I
为延时Δt
时间后测量的电流值,A。对于ΔI
,有故障判据式(9):
I
为电流变化量整定值,A。若式(9)满足,则保护动作,否则保护返回。
ΔI
一般按躲过负载突加、电网波动时产生的ΔI
进行整定。此方法难以进行故障定位,缺乏选择性,需要与定时限原理相结合,但故障瞬间的电流变化率会因故障发生位置的不同而有着不同的极性,即保护安装处的上级线路发生故障与保护安装处的下级线路发生故障时的极性相反,由此可以确定方向,无需单独配置方向元件。各故障特征量之间的关系见下页图13。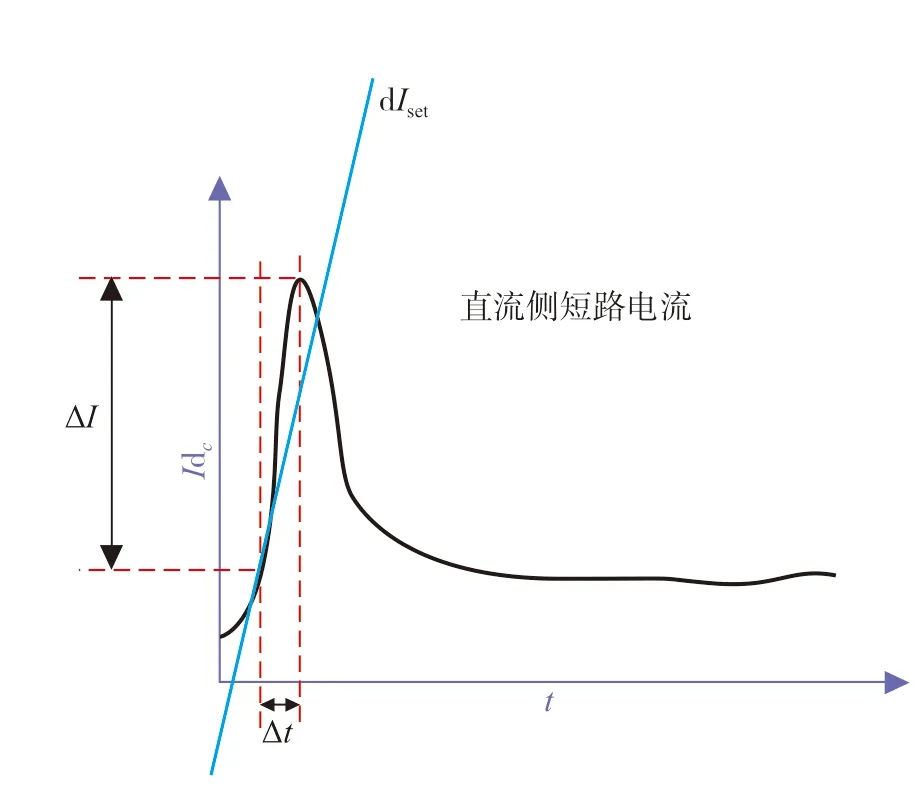
图13 电流变化率与电流变化量示意图
这种保护方法可以很好地应用于船舶直流区域配电网,这是因为保护中本身就需要很短的Δt
,结合定时限原理,能够很好地为船舶直流区域配电网全网络提供后备保护;此外,保护无需通信。3 结 语
本文首先对船舶直流区域配电网的拓扑结构与运行特点进行简要分析,并基于此对各类船用直流电网的主要保护方式在船舶直流区域配电网中的适应性进行分析,得到以下结论:
二极管保护可以起到辅助保护的作用,但不能单独构成保护;方向纵联保护、暂态极性保护存在一定的局限性,在一些运行工况下存在保护拒动的风险;智能算法保护的可靠性较高,但受通信条件的约束;定时限过电流保护无法满足速动性要求,但其定时限原理可以借鉴;电流差动保护、“电流变化率+电流变化量”相结合的电流突变量保护具有较好的适应性,可以据此进一步研究保护方案。