
发动机和AMT协同自适应最佳挡位寻优控制方法
2021-11-03 06:43:28杨正任宪丰孙晓鹏于鹏飞徐静
电子技术与软件工程 2021年18期
杨正 任宪丰 孙晓鹏 于鹏飞 徐静
(潍柴动力股份有限公司电控研究院 山东省潍坊市 261040)
1 发动机和AMT控制原理
1.1 发动机工况特性建立原理
发动机工况特性是发动机性能的具象反映。评价发动机工况特性的指标有很多,经济性油耗率是一个重要方面。发动机油耗率一般是通过开展标定实验,在发动机处于某一转速和某一转矩时,计算一定时间内的燃油消耗量,从而得到发动机的实际功率,并进一步计算得出的。记录发动机在不同转速、转矩下的燃油消耗变化,形成的变化曲线也称为发动机万有特性曲线。为准确建立发动机万有特性模型,需要进行大量标定试验,形成数据库,而这些数据都将存入发动机控制单元ECU 中以开展工况控制;另外,用据此得到的特性轨迹建立发动机工况模型,并分析比对出发动机油耗率最低的转速、转矩区间,即为发动机最佳工作区域,实际控制时应将工况落在最优工作区域作为最高优先级。某款发动机外特性曲线示意图如图1 所示。
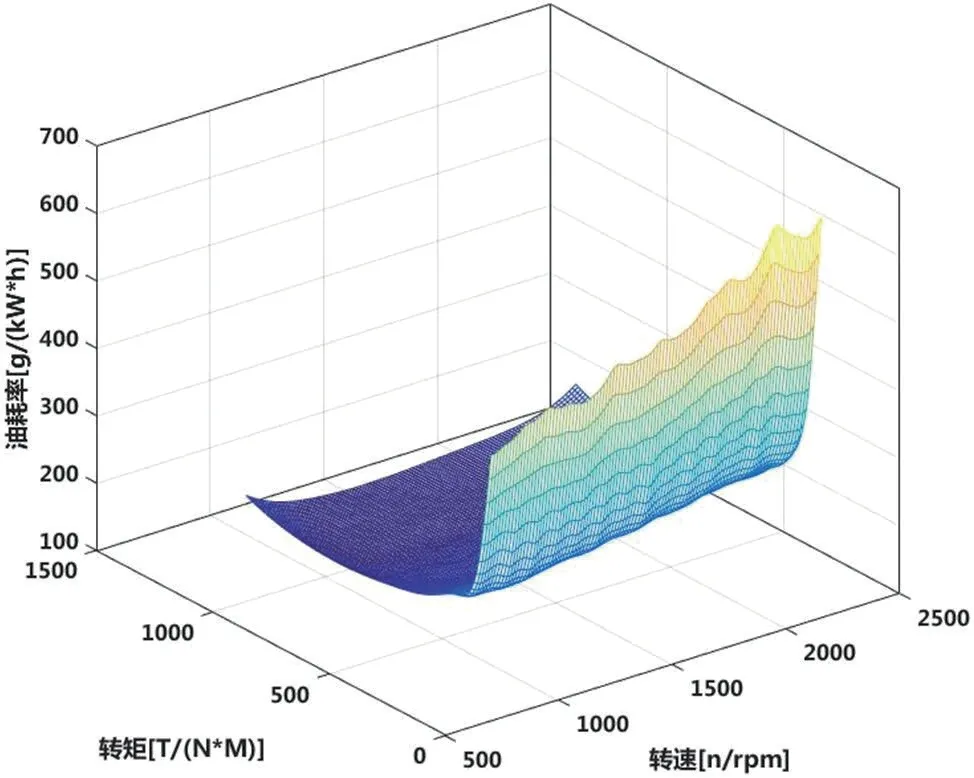
图1:某款发动机外特性曲线示意图
1.2 AMT最佳挡位决策原理
车辆运行时,通过变速箱控制单元TCU 得出当前车速和变速箱输入轴、输出轴转速信息,并通过计算不同挡位、不同传动比下发动机的转速和转矩,公式如下。

公式(1)中,变速箱输入轴转矩Tin(N*M)在经对应档位速比kx、机械传递效率η 转化后得到输出轴转矩Tout(N*M),在通常情况下输入轴转矩Tin即反映了发动机的输出转矩;公式(2)中,发动机转速经主传动比k0、挡位对应速比kx和机械传递系数转化后得到车速。
TCU 中计算得到的发动机转矩、转速与数据库中的信息实时比对,得到不同挡位下的燃油消耗率,经过比较最优确定最佳目标挡位。同时,通过TCU 和ECU 的信息交互可以实时地知道发动机当前的转速和转矩,在发出换挡指令时尽量寻找合理的目标挡位,以防止档位切换导致的转速、转矩变化过大,从而更加顺畅地实现换挡。如图2 所示。
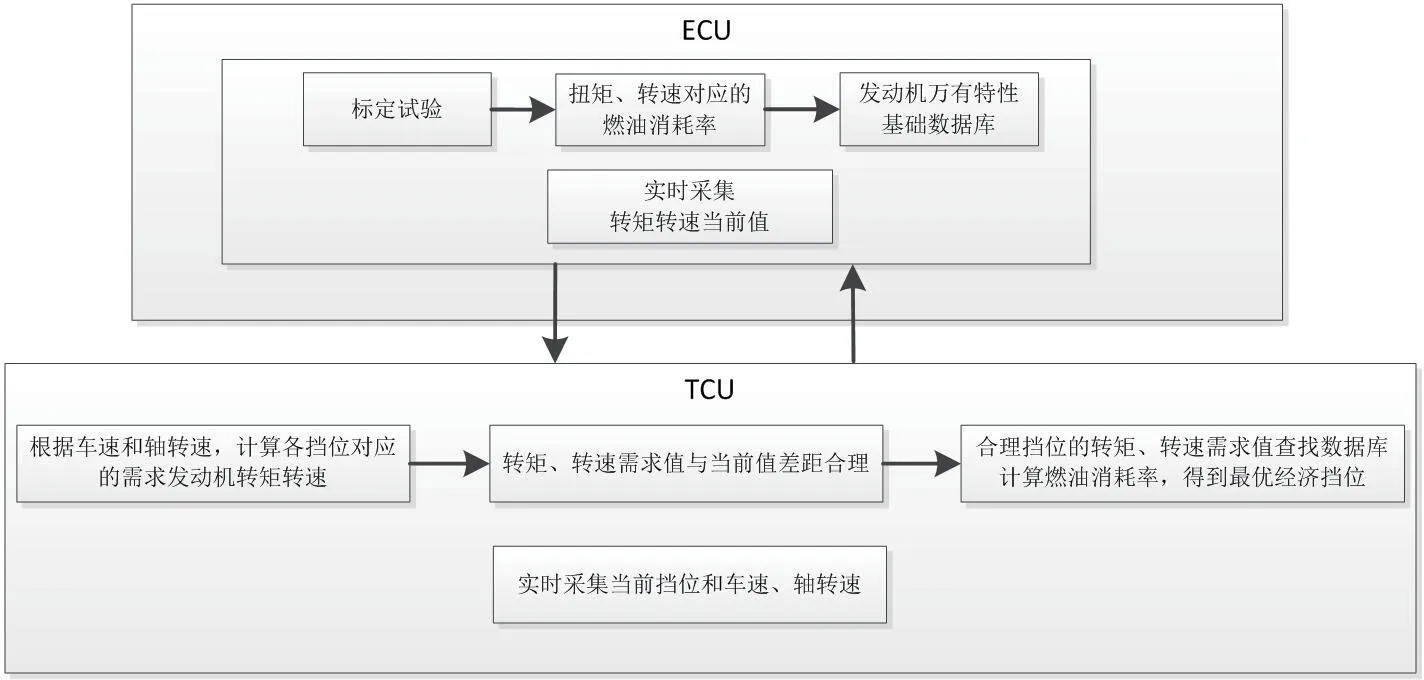
图2:ECU 和TCU 信息交互决策最佳挡位原理图
2 AMT调节失准的产生机理
在车辆运行过程中,随环境变化如果遇到一些极端工况,会因为路况、温度、湿度、气压等信息变化过大的原因,造成发动机扭矩、转速与油耗率的对应关系出现偏差;发动机在长期使用过程中的内部损耗、性能变化也会导致该问题。另外,变速箱中器件的磨损会影响机械传递效率的变化。这就导致了按照出厂时的控制信息决策,在很多情况下会出现当前挡位下的转矩、转速已不再对应最佳油耗率的情况;或者按照原机械传递效率计算的同挡位下车速和发动机转速、轴转矩和发动机输出转矩的对应关系发生变化,使得原先信息的决策结果已不能满足最佳性能要求,长期以往势必会使AMT 的换挡经济性、舒适性优势大打折扣。
3 协同自适应最佳挡位寻优控制方法
3.1 协同自适应实时校验
为解决这一问题,需加强ECU 和TCU 的信息密切交互,如换挡决策部分需要实时收集发动机转速、转矩信息,收集变速箱车速、挡位、轴转速等信息,实时决策目标挡位。为满足这一部分功能引入的ECU-TCU 快速交互可促成“目标挡位-油耗率”的直接对应,快速得出当前挡位对应的油耗率实际值。这样,发动机和AMT 可以实现信息实时交互,协同为一个整体互相校对,在工况的变化中进行自适应控制。
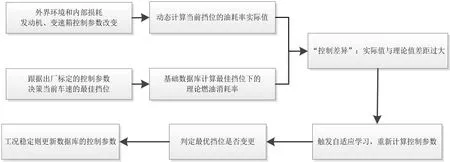
图3:协同自适应最佳挡位自寻优控制原理图
在出厂前的标定试验中,建立发动机万有特性曲线,变速箱当前车速不同挡位下发动机转矩、转速的基础数据库。如果外部环境和内部条件不发生过大变化,原有的控制参数理论上可以在当前车速下寻找合适挡位,使得对应的转速、转矩满足发动机燃油消耗最优。而为了应对工况变化,在此基础库之外,建立一个动态变化的数据库,实时计算一段时间内的转矩、转速-油耗对应关系,及同一车速在各挡位下对应的转速、转矩关系等。车辆运行中,按照基础数据库计算当前车速在实际挡位下的理论燃油消耗值,并使动态数据库记录实际的油耗值,如果二者的差值超过一定阈值,则判定原有的控制参数已不再准确、即出现了“控制差异”情况,报出此种错误状态。错误状态报出后,可选择进行重新学习相关参数,重新决策最佳挡位,以适应新的工况。协同自适应最佳挡位自寻优控制原理图如图3 所示。
3.2 最佳挡位寻优方法
“控制差异”错误触发后,说明原有的“转速、转矩-油耗率”,或“车速-发动机转速”、“轴转矩-发动机转矩”关系已发生变化,可使车辆进行自适应学习,使用最小二乘法采用曲线拟合的方式重新计算实际的发动机参数、变速箱参数,得到实际的转速、转矩与油耗率的对应关系,以及当前车速在不同档位下对应的转速、转矩,从而得到当前车速下各挡位实际对应的油耗率。

式中,y 为拟合输出结果,x 为拟合计算输入,bi为拟合参数,n 为拟合阶数
(3)式为最小二乘法曲线拟合的公式,以发动机特性关系来讲,当发动机油门固定时,外特性曲线可以看作转矩、燃油消耗率关于转速的一元函数,所以柴油发动机的外特性曲线可以采用曲线拟合的方法得到,将发动机转速赋给 x,将拟合结果y 设为发动机转矩或发动机油耗,在实车运行中实时收集两方数据,不断进行曲线拟合,动态调整发动机特性曲线,使得发动机的内部控制参数不断更新,更加贴近实际工况。为保证拟合效果准确,需进行线性回归模型评估,尽量提高最小二乘法的R-Square(决定系数,在0~1 之间)、减小RMSE(拟合标准差),增强曲线模型的解释能力,计算公式如下。

式中,ωi为计算系数, 为预测数据值,为原始数据均值。

式中,ωi为计算系数,yi为原始数据值,为原始数据均值。

式中,ωi为计算系数,yi为原始数据值,为预测数据值。

式中,R-Square 为决定系数,RMSE 为拟合标准差。
自适应计算完成后,按照新的参数计算不同挡位的燃油消耗量,判断当前车速下的默认决策挡位是否仍然对应最佳油耗率,如果已经不能满足,则进行目标挡位的变更,按照挡位实际油耗率关系寻找更优挡位。这样,发动机和变速箱的控制参数、不同车速下决策的最佳挡位可通过实时计算得出。如果控制参数可以在规定的较长时间内保持稳定,则对基础数据库进行更新,按照新的控制参数决策最佳挡位,可以使车辆在内部性能变化后也能始终处于最佳工况。
4 结果验证
在某款12 挡AMT 重卡实验中验证了此种自适应控制的调节效果。未进行重新自学习的实车测试油耗率与期望的理论值已有一定差距,因此为改善这种情况,对AMT 和发动机进行了协同自适应控制,在重新标定、数据库更新完成后,在同一工作环境下又开展了新一轮油耗试验,结果如图4 所示,可以看到油耗率有显著下降。
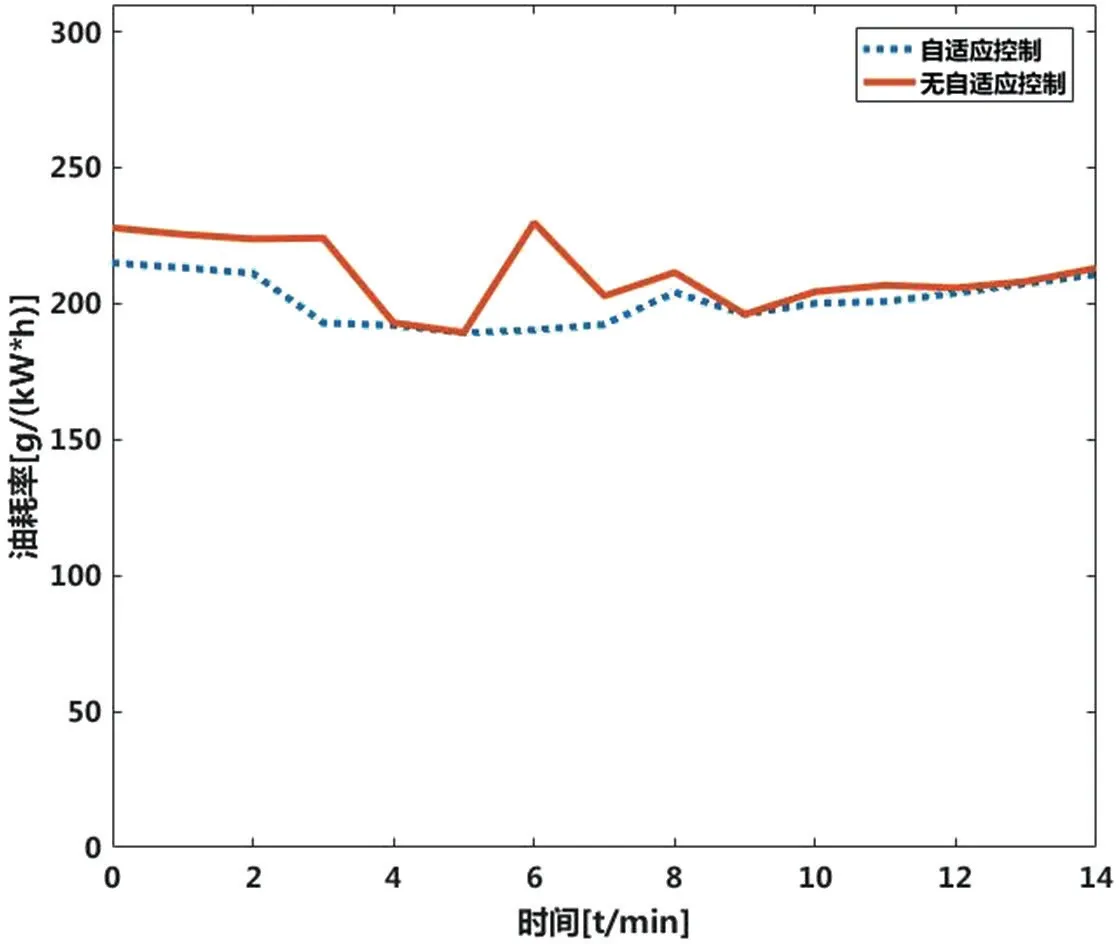
图4:燃油经济性测试结果对比
5 结论
本项研究成果可以实现如下目标,进一步提高了AMT 自动决策最佳性能的准确性。
(1)实时得到发动机最优工况和对应的变速箱最佳挡位,保证最优经济性能。
(2)对信息交互频繁的部分开展协同控制,可以更及时地把握发动机和变速箱工况信息,提高信息传递和计算速度,提升控制性能。
(3)对因外部条件和内部条件变化导致的工况变化设置最佳挡位寻优控制,比较灵活的修正调节参数,使性能始终自动调节处于最优。
猜你喜欢
飞控与探测(2022年6期)2022-03-20 02:16:14
力学学报(2020年4期)2020-08-11 02:32:12
车迷(2017年12期)2018-01-18 02:16:13
汽车维修技师(2017年6期)2017-11-18 06:01:49
黑龙江电力(2017年1期)2017-05-17 04:25:08
人间(2015年8期)2016-01-09 13:12:40
交通建设与管理(2015年16期)2015-03-20 15:20:13
汽车维护与修理(2015年5期)2015-02-28 12:16:30
筑路机械与施工机械化(2014年8期)2014-03-01 03:01:28
城市道桥与防洪(2013年8期)2013-03-11 15:18:35
