
AEB行人检测系统的设计与试验验证
2021-10-31 00:21兰永斌赵帅时彦平贾凯
河南科技 2021年15期
兰永斌 赵帅 时彦平 贾凯
摘 要:针对有行人出现时汽车自动紧急制动(AEB)的测试需求,本研究设计了一种行人检测系统。该系统主要包括假人目标、假人驱动装置以及控制系统,可以根据《中国新车评价规程》(C-NCAP)的AEB行人测试场景要求,驱动假人目标按规定的路线移动,并与测试汽车的驾驶机器人实现互联互通。为验证所设计的行人检测系统的有效性,进行了假人目标移动位移、移动速度和驾驶机器人的协同测试。测试结果表明,该行人检测系统的一次成功率超过90%,假人速度控制的精度达到96%,假人与测试汽车的碰撞位置准确度达到96%,可以模拟行人出现时的汽车紧急制动场景。该AEB行人检测系统可以用于C-NCAP行人测试,在汽车AEB功能测评中得到应用,具有较强的实际应用价值。
关键词:主动安全;自动紧急制动(AEB);行人测试
中图分类号:U463.5文献标识码:A文章编号:1003-5168(2021)15-0008-06
Abstract: Aiming at the test requirements of automatic emergency braking (AEB) of vehicle when pedestrians appear, this research designs a pedestrian detection system. The system mainly includes the dummy target, the dummy drive device and the control system, which can drive the dummy target to move along the prescribed route according to the AEB pedestrian test scene requirements of "China New Car Assessment Program" (C-NCAP), and achieve interconnection with the driving robot of the test vehicle. In order to verify the effectiveness of the pedestrian detection system, the moving displacement, moving speed and driving robot of the dummy target are tested. The test results show that the first success rate of the human detection system in this line reaches more than 90%, the accuracy of the dummy's speed control reaches 96%, and the accuracy of the collision position between the dummy and the test vehicle reaches 96%, which can simulate the emergency braking scene of the vehicle when the pedestrian appears. The AEB pedestrian testing system can be used for C-NCAP pedestrian testing, and has been applied in automotive AEB function evaluation, with strong practical application value.
Keywords: active safety;automatic emergency braking (AEB);pedestrian testing
我國每年重特大事故中,交通事故数和因交通事故死亡人数分别占到总数的69%和78.9%,全球因道路交通事故造成的人员伤亡逐年递增,为了降低该风险造成的危害,自动紧急制动(Autonomous Emergency Brake,AEB)系统在汽车上的安装率也越来越高[1-2]。AEB行人检测系统通过汽车上的传感器识别并跟踪行人轨迹,若有碰撞危险,则系统发出预警信号并自动采取制动措施使汽车停止,从而保护道路环境中的行人[3-6]。为了对AEB行人检测系统的性能进行全面测试及评价,我国发布实施的《C-NCAP管理规则(2018年版)》对AEB行人检测系统测试进行了系统规范[7]。这对于完善AEB行人检测系统的标准、降低交通环境中行人的受伤率具有实际价值。
为了验证和评估AEB行人检测系统的性能,国外相关研究机构开发了多种AEB行人检测装置[8]。奥地利4active System公司开发的AEB行人检测装置通过伺服电机驱动,结构较为紧凑,但灵活性较差,试验操作不便。英国ABD(Anthony Best Dynamics)公司开发的AEB行人检测装置采用盘式电机驱动,灵活性较好,但成本较高。上述AEB行人检测设备可以较好地评估欧洲交通环境下的典型危险场景,但是与我国道路行人交通习惯存在较大差异,设备和维护成本较高,不符合我国AEB行人检测系统的开发和测试要求。因此,本文针对我国AEB行人检测的测试需求,设计了AEB行人检测系统,它可以很好地契合C-NCAP的测试规定,系统测试场景可基于我国行人习惯灵活调整,并通过多次测试进行有效性验证。测试结果表明,本研究所设计的AEB行人检测系统满足相关测试要求,可以作为AEB功能测评和相关产品开发的支撑工具。
1 系统整体方案设计
1.1 AEB行人检测系统测试
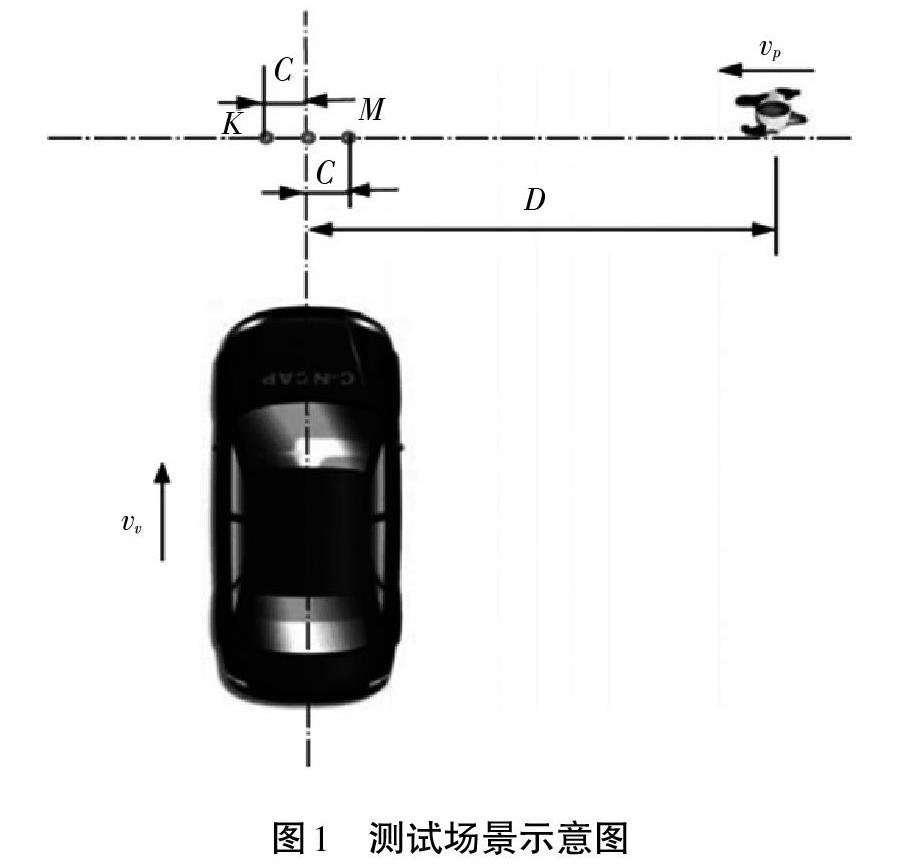
针对AEB行人检测系统,C-NCAP设定了4种典型测试场景:远端碰撞CVFA-50、远端碰撞CVFA-25、近端碰撞CVNA-25和近端碰撞CVNA-75[9]。如图1所示,假人目标与测试车辆中心线两者之间的水平距离([D])为6 m(远端)或4 m(近端)。测试汽车行驶速度([vv])为20 km/h、30 km/h、40 km/h、50 km/h、60 km/h,假人移动速度为5.0 km/h和6.5 km/h,其移动方向与测试汽车呈垂直状态,在汽车头部宽度的25%处(M点)、50%(C点)和75%处(K点)分别进行碰撞测试。
C-NCAP中的AEB行人测试场景是基于欧洲和美国交通事故数据建立的,与我国行人交通习惯存在较大差异,为此需要建立适合我国行人交通行为的测试方案。本研究设定2种测试场景[10-11]。一是近距离测试场景(CPN):汽车速度为5~25 km/h,假人和测试汽车的距离为7 m。二是远距离测试场景(CPF):测试汽车速度为10~60 km/h(10 km/h为间隔),假人与测试汽车的距离为20 m。假人移动速度为5.4 km/h,碰撞位置为汽车中间位置处。
1.2 测试方案设计
针对C-NCAP以及行人测试相关的规定,AEB行人检测系统应当具有如下功能:目标假人可在驱动系统的作用下以一定速度行驶;驾驶机器人能够控制汽车按一定的速度和路线行驶;为了使假人与测试汽车发生指定位置的碰撞,假人与测试汽车互联互通,保持实时通信。
根据上述功能需求,本研究设计了测试过程,如图2所示。将假人固定在托板上,借助牵引带驱动假人和托板移动,并在假人驱动系统和测试汽车上安装通信设备,借助实时动态基准站完成汽车与假人速度、位置的信息交互,满足测试场景的碰撞要求。
根据C-NCAP的规定,假人移动速度为5.0 km/h、5.4 km/h、6.5 km/h,测试车速介于5~60 km/h,汽车行驶方向与假人移动方向保持垂直。
2 硬件实现过程
2.1 假人目标优化
如图3所示,基于C-NCAP的尺寸规定分别设计了成人假人目标和儿童假人目标,并在假人表面涂抹红外反射二氧化钛IR-1000,能够在850~910 nm范围内使假人的红外反射率保持在40%~60%,有效提升了假人的视觉和红外特性[12]。
2.2 假人目标驱动机构
假人驱动机构分为牵引带、驱动和随动端以及托板。其中,托板上配置磁铁单元,可以让假人支撑杆借助磁性的作用与托板紧密结合,以便支撑假人直立移动,其结构如图4所示。当测试汽车碰撞到假人时,磁性连接中断,假人脱离托板,避免损坏其他部件。
如图5所示,牵引带驱动端的组成部分主要有电源、无线通信模块、控制器以及驱动电机。
假人目标驱动系统结构如图6所示,汽车速度和位置信息由无线通信模块传递给控制器,控制器根据获取的数据驱动电机运转,带动牵引带开始工作,实现假人位置的移动。
3 开发控制系统
3.1 系统的控制策略
按照AEB测试规程要求,在控制汽车的自动驾驶机器人上安装惯性导航仪和差分精确定位装置,分别测量出汽车的实时加速度、速度、偏航角以及精确位置,并通过无线通信模块将收集的数据传输到AEB行人检测系统。AEB行人检测系统对比测试规程对汽车速度、假人速度以及碰撞位置的规定,计算出假人应当启动的精确时间。假人移动过程中,驱动装置可以根据测试汽车的状态和位置,实时通过驱动电机进行加减速控制,最终使假人和测试汽车的运动关系符合测试规程的要求,发生指定位置的碰撞测试。
AEB行人检测系统和自动驾驶机器人之间有两个通信通道,通过915 MHz信道频率,实时动态(RTK)基准站可将GPS定位信息发送到AEB行人检测系统以及汽车的驾驶机器人。通过2.4 GHz信道频率,驾驶机器人则将汽车的位置、速度信息传输到AEB行人检测系统。AEB行人检测通信及控制过程如图7所示。
3.2 设计差分定位模块
全球定位系統(GPS)的一般定位误差大于3 m,不能满足测试要求的精度,为此借助差分定位方法来精确定位汽车和假人目标[13]。差分定位模块分为RTK基准站和移动站两大部分,RTK基准站放置在空旷的区域,在测试汽车和假人目标上均安装移动站。RTK基准站收集基本的GPS定位数据,然后将信息传输给移动站,移动站基于自身的GPS定位信息和RTK基准站发送的GPS定位信息,通过载波相位差分解算的方法,最终获得厘米级的定位信息,进而控制驾驶机器人和假人目标驱动系统,满足测试场景对两者相对运动的要求。
3.3 设计假人驱动控制器
AEB行人检测系统控制器通过接收测试汽车的位置、速度信息,实时分析和比较汽车实时位置是否与控制器计算要求的触发点保持一致,以此判断是否驱动假人开始移动。假人移动触发后,通过采用与测试场景相匹配的电机驱动算法,控制器可以实现对假人位置的精确控制。控制器的主控芯片(STM32F767)可以接收各模块发送的数据信息并进行处理,被控芯片(STM32F103)可以精确地控制电机转速。控制器的结构和相关模块如图8所示。
3.4 假人驱动算法
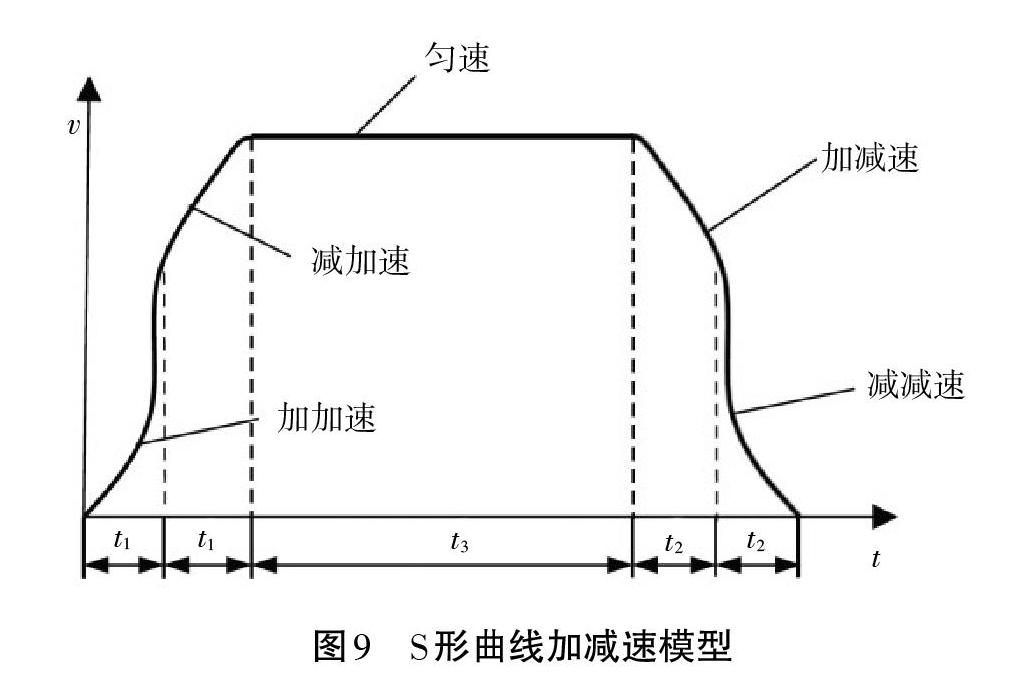
AEB行人测试场景中,假人有加速、匀速以及减速的不同过程,这就要求对假人的速度进行精确控制,以便将假人传送到指定的位置。为此,设计如图9所示的驱动控制算法,将加减速过程细化为减减速阶段、加减速阶段、匀速阶段、减加速阶段以及加加速阶段,并且加速度变化率保持恒定。
设[vs]为初速度,[ve]为末速度,加速度的急动度为[J],时间为t,根据运动学关系,假人的加速度[a]、速度[v]以及位移[s]计算公式如表1所示。
3.5 系统综合控制
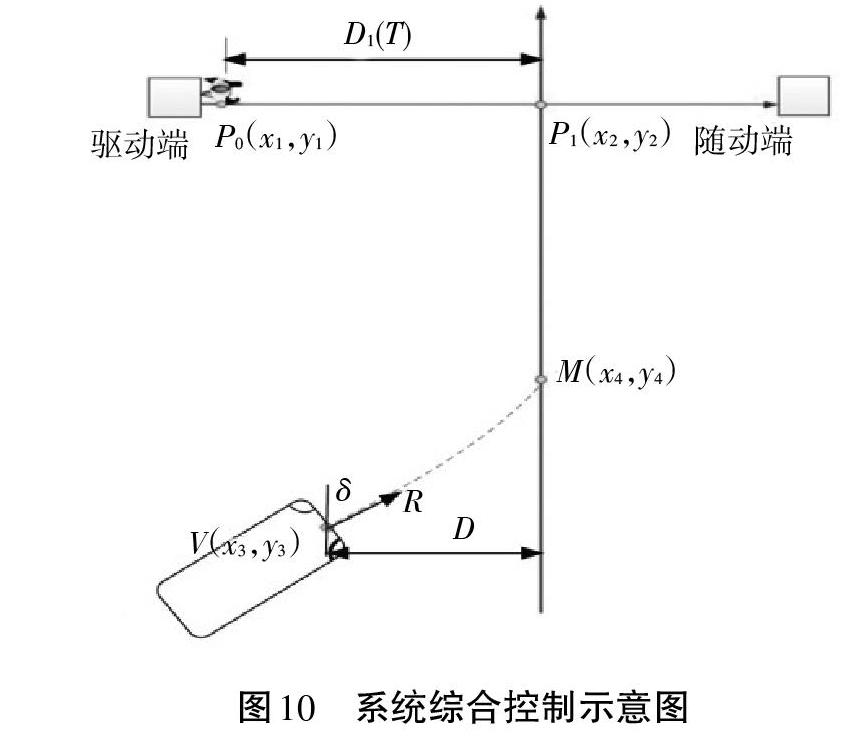
3.5.1 计算系统触发点。基于差分精确定位系统和假人移动站获取假人初始位置[P0]的坐标([x1],[y1])和碰撞点[P1]的坐标([x2],[y2])。同时,由移动站获取汽车头部中点[V1]处坐标([x3],[y3])和航向角[R]。由车速[v0]和假人到碰撞点所需的时间[T],计算得出系统触发点[M]的坐标([x4],[y4])。
3.5.2 调整测试汽车的姿态和位置。计算车头中心点[V1]与直线[MP1]的距离[D2]和汽车航向角[R]与[MP1]的夹角[δ]。测试汽车的驾驶机器人根据[D2]和[δ]的变化,控制方向盘进行转动,从而使汽车的航向角和位置满足测试要求[14]。
3.5.3 系统综合测试。驾驶机器人系统实时更新汽车车头中心点[V1]的坐标,并发送相关数据至AEB行人检测系统,然后由AEB行人检测系统综合比较[V1]点与[M]点,当[x3]=[x4]并且[y3]=[y4]时,驱动假人移动,并按测试场景的要求调节电机转速,使得汽车达到[P1]点时,假人移动到[P1]点。系统综合控制示意图如图10所示。
4 系统测试及验证
为了对AEB行人检测系统进行验证,本文按照C-NACP规定的行人测试场景进行了行人危险工况测试,以验证AEB行人检测系统对假人目标位置、速度的控制精度以及AEB行人检测系统与测试汽车的无线通信性能。如图11所示,首先进行单功能测试,在不同测试场景下,AEB行人检测系统不与驾驶机器人联动,测试电机控制算法对假人的驱动控制精度。
每种测试场景进行3次试验,由于不同测试场景下假人与测试汽车的距离要求不同,一共完成了(4+11)×3=45次试验,相关测试结果如表2所示。基于试验结果进行计算,假人目标控制精度达到96%(控制精度=符合要求试验次数/总试验次数)。研究表明,本文所设计的AEB行人检测系统可以根据测试要求对假人移动过程进行精确控制。
如图12所示,在单功能测试完成后,将AEB行人检测系统与驾驶机器人联通,测试两者之间的无线通信性能,查看假人与测试汽车的碰撞点是否满足测试场景的规程要求。
根据C-NCAP进行20次试验(测试车速为20~60 km/h,每种测试场景进行5次试验),根据国内测试场景要求进行11次试验,共进行31次试验,测试结果如表3所示,表中的数字表示第几次试验完全达到测试场景规定的碰撞速度、位置等关键指标。由表3的统计情况可知,1次试验即达到要求的概率为90%,2次试验即达到要求的概率为100%。
在测试过程中,AEB行人检测系统对假人速度以及假人与测试汽车碰撞位置的检测准确度达到96%,由于地面摩擦力不均及牵引带的弹性,在单功能测试45次试验中,有2次出现误差大于精度有效范围的情况,但其综合误差仍然较小,可以满足测试规程对于精度的要求。
在对AEB行人检测系统和驾驶机器人进行联动测试时,除了3次由于AEB行人检测系统与驾驶机器人的无线通信被其他设备干扰外,两者之间的无线通信始终保持良好。由此可知,应当在空旷无干扰的环境下进行AEB行人测试。在无其他通信干扰的情况下,AEB行人检测系统可以较好地与驾驶机器人进行联动测试。
综上所述,本文设计的AEB行人检测系统可以用于C-NCAP和中国行人测试场景,相较于国外的AEB行人检测系统,本文设计的测试系统具有如下优势:AEB行人检测系统的控制参数可以灵活调整,满足国内交通场景的行人检测要求;整个系统成本较低,可供更多的AEB行人测试和研发单位使用,有助于推进AEB行人检测系统更新。本文设计的AEB行人检测系统也存在一定不足,比如,假人目标没有考虑雷达的反射特性,与《欧洲新车评估规程》(E-NCAP)等国外测试规范没有很好的适用性。
5 结论
本文设计了一种AEB行人检测系统,可以根据C-NCAP和AEB行人测试的要求,对假人移动过程进行精准控制,实现了AEB行人检测系统与驾驶机器人的实时无线通信。根据测试结果,本文设计的AEB行人检测系统对假人目标速度和位移的控制精度达到96%,与驾驶机器人的联动测试一次成功率达到90%,所开发的假人目标具备人体特征及红外反射特性,能够用于行人危险工况的测试,其测试精度较高,它是汽车AEB系统功能测评和相关产品开发的有效支撑工具。
参考文献:
[1]吴俊,向国梁,杨俊辉,等.汽车自动紧急制动(AEB)行人检测系统的开发与测试[J].汽车安全与节能学报,2018(4):401-409.
[2]GSUL M,胡予紅,周旋,等.道路交通运输安全发展报告(2017)[J].中国应急管理,2018(2):48-58.
[3]李刚,杨志,吴迪.汽车两级自动紧急制动系统控制研究[J].机械设计与制造,2020(7):134-138.
[4]包崇美.聚焦国内外AEB测试[J].世界汽车,2018(4):86-93.
[5]刘宏伟,张杰,朱恩利,等.基于线控制动系统的AEB功能开发[J].汽车工程学报,2020(3):207-212.
[6]陈达兴,张强,梁锋华,等.AEB测试技术研究[J].试验研究,2015(2):13-20.
[7]中国汽车技术研究中心.C-NCAP管理规则(2018年版)[S].北京:中国标准出版社,2018.
[8]王海镔.车辆紧急避撞算法研究[D].杭州:浙江大学,2020:18-19.
[9]石博.乘用车自动紧急制动系统研究[D].长春:吉林大学,2019:13.
[10]冯海鹏.汽车自动紧急制动系统建模及控制策略研究[D].镇江:江苏大学,2019:16-17.
[11]杨为,赵胡屹,舒红.自动紧急制动系统行人避撞策略及仿真验证[J].重庆大学学报,2019(2):1-10.
[12]刘颖,贺锦鹏,刘卫国,等.自动紧急制动系统行人测试场景的研究[J].汽车技术,2014(3):35-39.
[13]张照杰.网络RTK定位原理与算法研究[D].青岛:山东科技大学,2007:15-16.
[14]刘伟,朱为国,单东升.汽车智能制动系统(IBS)电磁阀温度场分析[J].机械制造与自动化,2020(1):154-157.
