一种激光雷达和红外摄像头联合标定方法
2021-10-27 09:10蒋进军茅时群谭兴福
港口装卸 2021年5期
蒋进军 茅时群 谭兴福
上海振华重工(集团)有限公司
1 引言
随着港口码头智能化升级改造,激光器和视觉融合技术成为当前研究和应用热点。在传统的二维目标检测中,图像识别已经很成熟,通过颜色和纹理很容易分辨出物体的轮廓,特征信息很明显。但二维图像无法准确计算出目标物体的尺寸、距离,而通过激光雷达扫描出点云,可获取物体的纯几何结构、距离、尺寸等相关信息。将图像和点云融合,通过点云获取物体尺寸、位置,然后结合图像分割、识别目标物体,增加物体识别准确度,从而达到很好的互补。
激光器和图像传感器标定是融合技术必不可少的一步,标定的好坏直接关系到后续融合识别、定位的效果。在自动化龙门起重机(以下简称场桥)或岸边集装箱起重机(以下简称岸桥)中,小车架上通常装有摄像头以及激光雷达,用于检测吊具或者集装箱位置[1-2],如何将摄像头和激光雷达快速、准确进行标定,是传感器使用过程中非常关键的一步[3-4]。结合现场实际使用情况,在吊具上贴两张3M纸,作为标定靶,通过标定靶快速将激光雷达和摄像头进行同步。
2 原理和方法
标定对像是近红外摄像头和激光雷达,均安装在起重机小车架上。
2.1 标定原理
将激光器雷达和摄像头同步,先通过式(1)将激光雷达坐标系变化到摄像头坐标系,然后通过式(2)变换到图像坐标系,最后通过式(3)变换到像素坐标系,从而将点云数据变换到图像中,实现配对。
(1)
(2)
(3)
联合上面3个公式得到公式(4):
(4)
式中,K只与摄像机内部结构有关,为摄像头内参矩阵,可以通过棋盘格标定方法得到;u、v是特征点在图形中的像素坐标,可以直接通过图片获取;XL、YL、ZL为特征点在激光器雷达中的坐标,可以通过激光器雷达扫描出的点云数据中获取;T为摄像头相对于激光器雷达的变换矩阵,旋转矩阵和平移向量组成,也是最终需要求取的转换矩阵。
其中:
(5)
(6)
为了求取激光雷达到摄像头之间的转换关系,首先通过摄像头和激光雷达分别获取图像信息和点云数据,且保证获取图像和点云数据时外部环境以及自身姿态没有变化,然后分别在图像和点云数据提取出同一特征点。摄像头内参矩阵可以通过棋盘格标定[5-6]出来,结合标定出来的摄像头内参矩阵,n个激光雷达坐标系中的特征点坐标,以及与这n个点对应在摄像头坐标系下的像素坐标,利用EPnP[7]算法,最终求解出T。
2.2 标定方法
为准确获得激光雷达到摄像头坐标系的转换矩阵,结合当前摄像头和激光雷达的特性,需要设计一个标定靶,用于在图像和激光同时精确识别对应数据中特征点,并进行匹配,从而求解出T。
标定靶在设计的时候,需要考虑到图像和激光雷达之间的特征,通过在吊具上安装两个3M反光贴片,标定过程中摄像头拍摄两个3M反光贴片的图像,激光雷达扫描3M反光贴片,然后通过算法分别在图像和点云数据中识别3M贴纸的中心点(见图1)。

图1 标定靶
该标定靶既有矩形标定板的结构简单的优点,同时可以有效消除点云的偏差,保证识别的精度,最终保证激光器雷达和摄像头同步的准确。
3 计算摄像头的外参
3.1 摄像头特征点获取
因为此处标定工作在室外进行,为避免各种光线的干扰,摄像头的补光灯采用的是红外补光灯。近红外摄像头配有红外滤光片,通过滤光片有效滤掉红外波长外的光线。但在实际操作过程中,尤其是夏天阳光直射的时候,阳光的干扰相对严重,因此在实际标定过程中,通过将摄像头光圈尽量调小,进一步降低太阳光的影响。获取图像后,图像进行自适用二值化,然后再对图像进行打标签,根据标签值将图像分割出来,并过滤掉不符合要求的块,再利用分割出来的圆,进行椭圆拟合圆心。
3.2 雷达获取特征点方法
获取点云数据时先提取标定板数据,并得到标定板所在平面方程,将点云数据投影到二维平面,然后将二维平面点转换为图像,在图像中根据能量值进行二值化,提取轮廓,根据轮廓进行椭圆拟合圆心,再根据所获取的椭圆圆心,反求圆心的3D坐标。
3.2.1 标定板数据提取
通过直通滤波,缩小点云数据大小,然后根据激光点能量值,将扫描在3M贴纸上的点提取出来,采用随机抽样一致性进行平面拟合。
随机抽取一批种子点,{pi},i=1,…n,对其求得拟合平面Ax+By+Cz+D=0。向量n(A,B,C)为平面的法向量,即{pi}组成的协方差矩阵的最大特征值对应的特征向量。D为坐标原点到该平面距离,即为{pi}中心点pj和法向量的点乘。
计算所有点pi到平面距离d,d小于阈值dth则为局内点,否则为局外点。
(7)
重复进行迭代,直到找到最优解。最优解对应A,B,C即为平面法向量。
3.2.2 二维坐标投影
由于三维空间点并不完全在一个平面点,因此需要将三维空间的点投影到二维坐标点。p0为平面上任意一点,p为标定板点云,p′为p在平面上的投影点,则投影公式为:
(8)

3.2.3 三维中心点求解
根据激光器扫描点的能量值,将图像进行二值化,在二值化图像提取轮廓图,进行边缘提取,然后利用这些边缘拟合椭圆方式求取圆心,求得中心点(xp,yp)。
(9)
(10)
将中心点x′p和y′p代入平面方程,反向求取z′p,得到三维中心点坐标。
3.3 EPnP求解T
利用n个激光雷达坐标系中的特征点坐标,以及与这n个点对应在摄像头坐标系下的像素坐标,采用EPnP方法来计算出摄像头的外参矩阵T。EPnP算法核心原理是某一坐标系中3D坐标表示为一组虚拟的控制点的加权和。一般控制点选取个数为4个,且4个控制点不共面。激光雷达坐标系中任意一个特征点可由4个控制点来表示,同时摄像头坐标坐标系中任意特征点也可以由4个控制点来表示。求出摄像头坐标中4个控制点坐标后,从而最终计算出摄像头的外参矩阵。在文中的公式中,分别用上标w和c表示在激光雷达中的坐标和摄像头坐标系中的坐标。
3.3.1 控制点基本原理
激光雷达中,每个点可以由4个控制点表示:
(11)
式中,aij为加权系数。一旦控制点确定后,且满足4个控制点不共面前提,aij,j=1,2,3,4是唯一确定的。在摄像头坐标系中,存在同样的加权和关系:
(12)

(13)
进一步可得,
(14)
(15)
已知控制点,则可以求出每个控制点加权系数:
(16)
3.3.2 控制点选择
理论上,控制点选取只要可逆即可。在激光器雷达坐标系中,选择中心作为第一个控制点:
(17)
3D参考点集为:
(18)
记ATA的特征值为λc,i,i=1,2,3,对应的特征向量为vc,i,i=1,2,3,剩余3个控制点按照式(19)来计算:
(19)
3.3.3 求取控制点在摄像头坐标系中的坐标
在摄像头坐标系中,每个特征点同样存在如下加权关系:
(20)
(21)

(22)
(23)

Mx=0
(24)

(25)
式中,vi是M的N个零特征值对应的特征向量。对于第i个控制点:
(26)

在激光器雷达坐标系中控制点,通过外参矩阵转换到摄像头坐标中后,两两之间的距离还是保持不变。引入这个约束条件:
(27)
(28)
该方程是关于{βk}k=1,…N的二次方程,主要特点是没有{βk}k=1,…N相关一次项,在求解时,将二次项βiβj替换为βij,将方程变为关于{βij}k=1,…N的线性方程。通过4个控制点,共可以得到6个方程,通过6个方程求解{βij}k=1,…N,然后通过{βij}k=1,…N再求取{βk}k=1,…N。
3.3.4 计算激光雷达到摄像头坐标系的转换矩阵
控制点在摄像头坐标系的坐标为:
(29)
计算每个特征点在摄像头坐标系下的坐标:
(30)

(31)
(32)
计算H:
H=BTA
(33)
计算H的SVD分解:
H=UΣVT
(34)
求取旋转矩阵:
R=UVT
(35)
求取平移t:
(36)
4 标定与测试
4.1 标定
在不同位置,激光雷达和摄像头分别采集标定板数据,共获取20组数据。通过这20组数据,来计算T。具体步骤如下:
(1)利用棋盘格,将摄像头内参进行标定,得到矩阵K。
(2)采集数据,将吊具停止不同高度,然后再分别在对应高度上采集摄像头和激光雷达的数据,共采取20组数据,每组数据中有2个特征点,并将采集的数据按顺序命名,保证图像和点云数据是一一对应的。
(3)获取点云中的40个特征点。
(4)获取图像中的40个特征点。
(5)根据40个特征点,采用EPnP,计算出矩阵T。标定得到的旋转矩阵如下:
(37)
4.2 标定效果测试
在不同高度另外采集10组测试数据,在图像和点云数据中,分别计算3M贴纸的圆心,然后根据获取的T矩阵,以及摄像头的内参矩阵,将激光雷达坐标中的3M贴纸的3D坐标转换到摄像头中的像素坐标系,来验证激光雷达和摄像头的融合标定的精度,见表1。
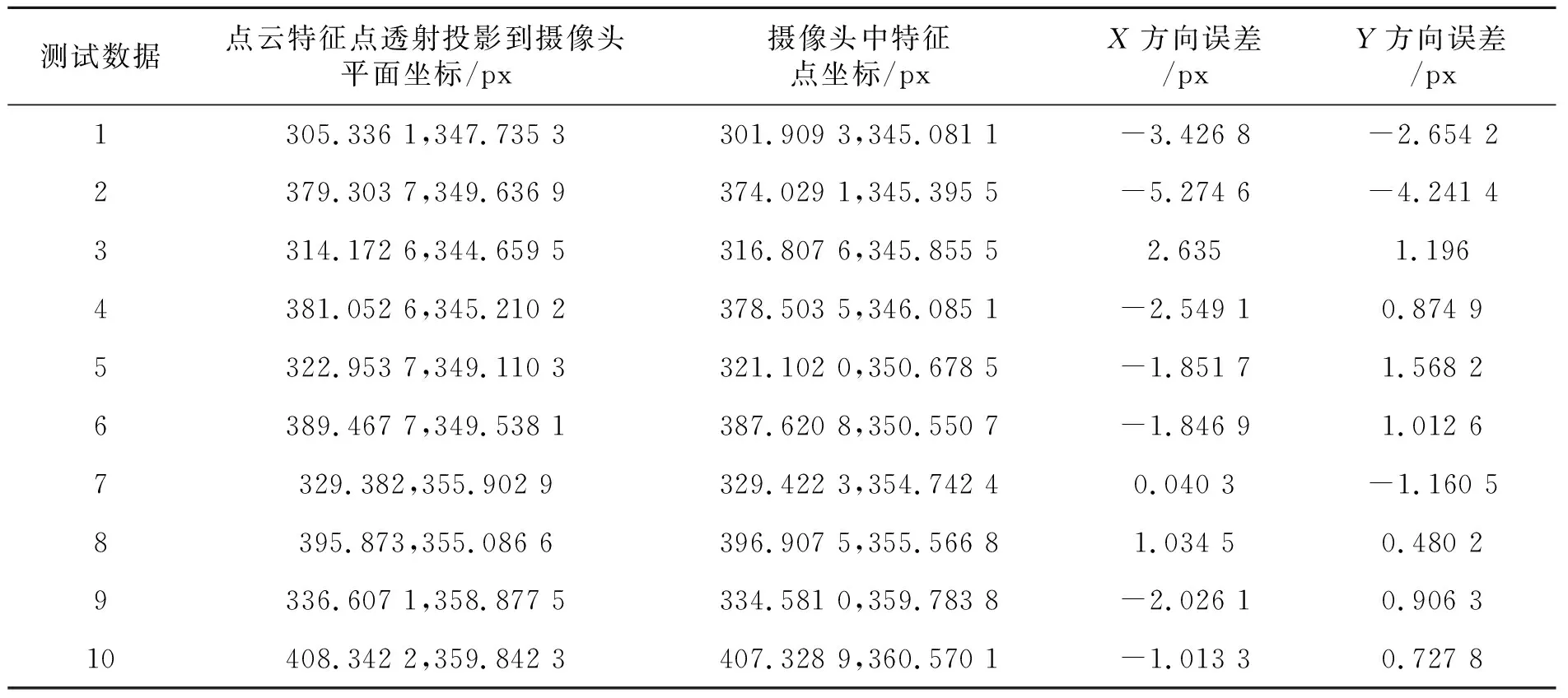
表1 激光雷达和摄像头测试效果
根据表1测试效果,激光器雷达中特征点投影变换到像素坐标系后,最大误差在5个像素左右。标定靶离激光雷达越远,相对误差越大。
5 结语
该方法可以快速精确地将激光雷达和摄像头进行同步标定。在实际使用过程中,如果还需进一步提高标定精度及抗干扰能力,可以继续增加标定特征点数目或者增加点云数据量,提高点云特征点精度,最终降低标定误差。实际测试过程中,该标定方案可靠,精度高,完全满足应用要求。
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
河北省科学院学报(2020年4期)2020-03-19
科学(2020年6期)2020-02-06
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
光学精密工程(2016年5期)2016-11-07
工业设计(2016年4期)2016-05-04