长征五号系列运载火箭一级氢箱防晃板减配优化设计
2021-10-26 06:08余光学邓舞燕
导弹与航天运载技术 2021年5期
余光学,邓舞燕,李 东
(1. 北京宇航系统工程研究所,北京,100076;2. 中国运载火箭技术研究院,北京,100076)
0 引 言
液体运载火箭飞行过程中,各种干扰使得储箱内的推进剂发生晃动,并对火箭产生附加的干扰力和干扰力矩。在贮箱液体表面张力未起主要作用的前提下,采用等效动力学模型的方法,将推进剂的小幅晃动行为等效为弹簧质量模型进行求解,这是分析推进剂晃动问题的最有效手段之一[1,2]。晃动稳定需要借助防晃板布局提高阻尼来实现,通过防晃板来改善阻尼,不仅可以压低晃动稳定所需的对数幅频特性,同时还可以减小相位滞后,其结构简单,但是会带来较大的附加质量,损失运载能力。液体运载火箭晃动抑制及稳定问题仍是有待解决的关键性课题之一[3,4]。本文重点针对长征五号系列运载火箭(以下简称CZ-5)试样阶段一级氢箱防晃板减配问题开展了姿控总体设计分析,包括频域分析与时域仿真,通过飞行试验验证了设计的有效性。
按照传统设计,CZ-5火箭要求起飞段和浅箱关机段推进剂平均阻尼达到5%以上,其它时段平均阻尼要求为3%以上。在起飞、跨声速、最大动压、助推关机等特征秒点均需配置防晃板,在助推段100~175 s之间,鉴于弹性模态复杂,要求适度加密防晃板布局,降低刚-晃-弹性耦合设计难度。随着设计的深入,CZ-5火箭姿控总体放弃了在所有时间段平均晃动阻尼3%以上的要求,修改为所有特征时刻的晃动稳定裕度满足稳定性设计指标。对于一级氢箱,鉴于其晃动质量小,晃动惯性力对姿态运动影响小,在助推段部分时间段进一步突破了频域稳定的设计准则,只要求其时域仿真不能发散,同时兼顾利用系统的稳定调节需求。优化后,全箭防晃板数目大大降低,其中芯一级氢箱只保留2块防晃板,突破了传统的稳定设计理念,成为一项重要创新[5]。
1 刚晃弹动力学模型分析
1.1 液体运载火箭晃动模型
推进剂晃动是指火箭贮箱中液体推进剂自由表面的周期运动。火箭控制系统指令引起的箭体运动,发动机关机时的推力变化,飞行中面临风切变及阵风引起的加速度改变,都能激起贮箱中的液体推进剂晃动。推进剂在贮箱内周期性的晃动,引起推进剂与贮箱之间相互作用力,直接影响火箭飞行的稳定性[6,7]。
考虑刚体、晃动与弹性特性,给出火箭飞行姿态运动的动力学方程[6]如下:
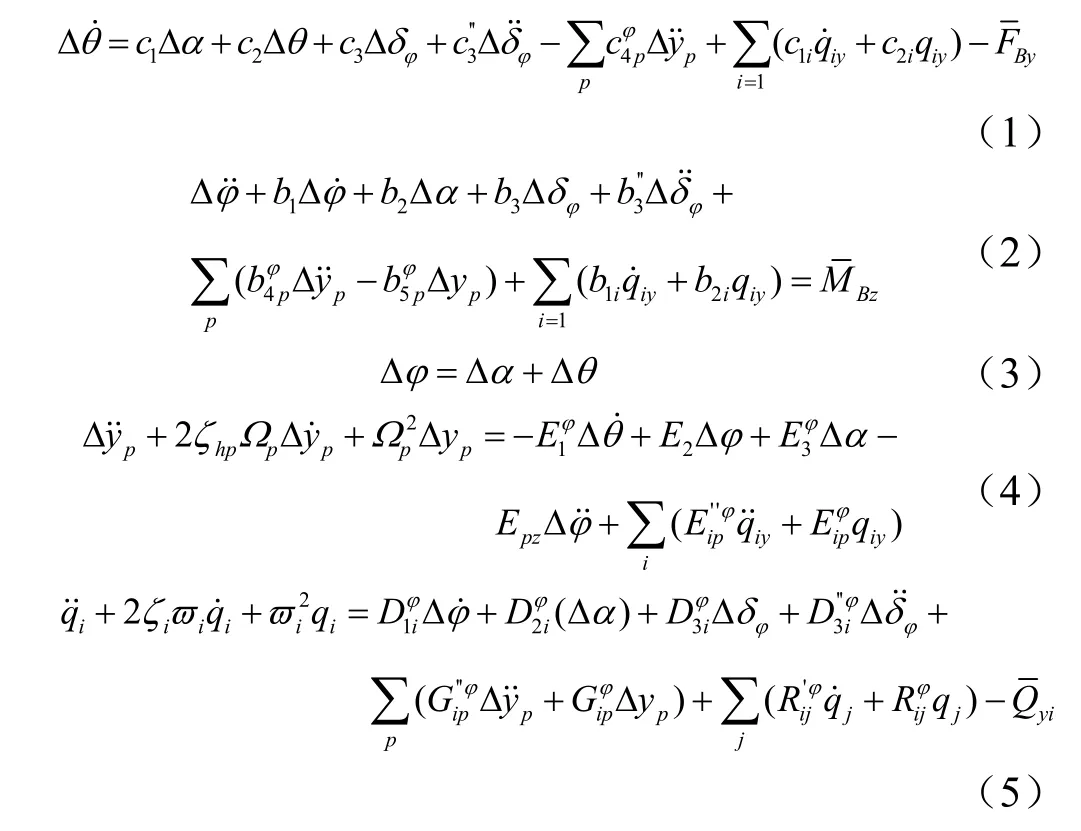
上式中的符号说明参见文献[8]。
可见,推进剂晃动与箭(弹)体的姿态运动是通过惯性力的相互作用而直接耦合的。如果晃动不稳定,则晃动的幅值不断增大,作用在箭体上的晃动惯性力就不断增大,使由晃动惯性力所产生的姿态角不断增大,导致姿控回路中的非线性环节发生信号阻塞,从而使箭体姿态运动发散。
1.2 液体晃动引起的姿控稳定分析
考虑一个贮箱(p=1)的箭体传递函数为

式中0Ω,jΩ分别为零点圆频率与极点圆频率,分别为零点阻尼与极点阻尼,。可见考虑晃动后的箭体姿态角传递函数增加了一对复数零、极点。
由于k41,b41,b51都是极小的数,故这对复数零、极点的频率非常接近晃动的固有频率1Ω,形成一对偶极子。从开环特征根来看,当ξ1﹥0时,由晃动引起的姿态角运动是稳定的。但由于1ξ很小,所以推进剂晃动被激励后衰减得很慢。
考虑推进剂晃动后的姿控稳定条件取决于晃动零、极点的相对位置。防晃板减配后,晃动质心到火箭质心的距离影响着系统稳定性。当Ω0﹤Ωj时,闭环传函数无右半平面极点,系统稳定,故零-极结构为稳定结构,即使晃动没有阻尼系统也是稳定的;反之Ωj﹤Ω0时,系统不稳定,晃动的极-零结构为不稳定结构。
当xz-ρz﹤xlp﹤xz+le时,晃动出现极-零分布,晃动可能不稳定。晃动极-零分布条件进一步变换为

火箭在飞行过程中随着推进剂的消耗,每个储箱内的晃动质量中心位置不断变化,因此晃动零、极点的相对位置也是在不断变化的,姿控总体方案需要确保火箭全程晃动可控。
2 CZ-5系列运载火箭一级氢箱防晃板减配
CZ-5方案阶段,继承传统火箭设计经验,将火箭贮箱主要飞行段平均晃动阻尼按照3%考虑,并以此为依据指导防晃板布局。方案阶段设计时,防晃板采用“环形、半圆形和十字分隔”3种,层数较多。直到试样阶段,一级氢箱防晃板优化为6块。
在CZ-5 Y2飞行任务之后,重点针对一级氢箱防晃板布局开展分析,一级氢箱取消防晃板后,助推段短时间(56~90 s)内会出现频域不稳定,但时域仿真表明,助推与芯一级全程飞行不会出现发散失稳。考虑到CZ-5B火箭对利用系统的依赖性较强,继续保留了一级氢箱400 s附近的防晃板,为利用系统工作创造更加稳妥的条件,因此一级氢箱可取消前4块防晃板。
从CZ-5 Y3任务开始一级氢箱只保留2块防晃板,各贮箱的防晃型式为“环形挡板”和“箱底十字分隔板”2种。其中环形板的作用是通过提高晃动阻尼抑制晃动干扰,十字隔板的作用是通过提高晃动频率实现对发动机关机段晃动能量的快速耗散,两者的目的都是确保火箭姿控的稳定性。
3 CZ-5系列运载火箭一级氢箱晃动稳定研究
3.1 助推飞行段晃动分析
3.1.1 CZ-5任务分析
在一级飞行段(含助推段与芯一级飞行段)对一级氢箱无防晃板状态开展频域分析与时域仿真。取一级氢箱阻尼为极小值(1×10-6以下,低于空箱阻尼值1×10-5),结果表明:在助推飞行段,氢箱晃动在56~90 s存在频域不稳定的工况,其它时间段可以实现幅值或相位稳定。图1给出了60 s时刻箭体开环频率特性,对应于火箭上限状态,氢箱幅值超过0 dB,相位朝下穿越-180°,不满足频域稳定条件。

图1 助推飞行段60s稳定特性Fig.1 Stability Characteristics of 60s
从频域稳定性的角度,去掉芯一级氢箱防晃板后,56~75 s和90 s特征点,晃动不稳定;从数学仿真结果的角度,晃动阻尼减小后晃动幅度增大,助推段氢箱最大晃动位移值约为0.05 m,晃动幅度增大对箭体角速度和姿态都有一定的影响,会导致箭体抖动。
CZ-5火箭典型特征秒点的晃动质量与箭体总质量对比如表1所示。芯一级H箱晃动质量不到飞行总质量的1/100。可见,芯一级氢箱即使有晃动,其惯性力对箭体影响也比较小。
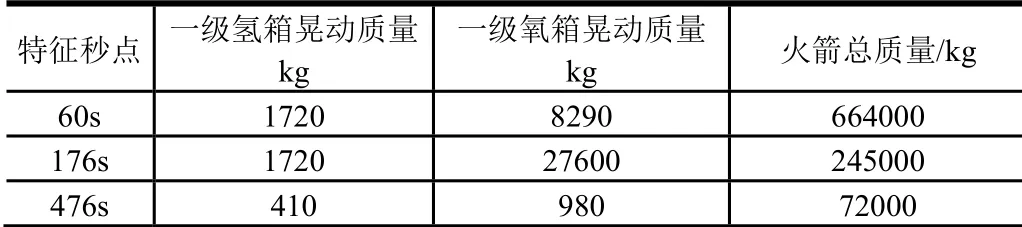
表1 一级贮箱晃动质量与火箭总质量比对Tab.1 Comparison between the Sloshing Mass of the First Stage Tanks and the Total Mass of the Rocket
对芯一级氢箱,取消防晃板后,虽然助推段短时间(56~90 s)内会出现频域不稳定,但由于芯一级氢箱晃动质量相对整体火箭质量而言很小,其带来的惯性力也很小,因此芯一级氢箱晃动不会对飞行姿态、发动机摆角等特征参数带来显著的不利影响。时域仿真表明,在助推与芯一级绝大部分时间内,氢箱晃动不会引起姿态失稳。
3.1.2 CZ-5B任务分析
CZ-5B贮箱防晃板的设计来源于CZ-5,即CZ-5在设计防晃板的时要求兼顾CZ-5B。CZ-5B Y1飞行一级H箱的防晃板只保留2块,个别秒点氢箱晃动虽然为“极-零”状态,但是时域仿真全程姿态稳定,贮箱晃动未发散。
从频域看,俯仰通道芯一级贮箱出现“极-零”,但是晃动幅值稳定,俯仰通道助推贮箱额定和上限相位稳定,下限相位不稳定。图2给出了CZ-5B任务130 s时的俯仰通道开环Bode图。时域仿真结果表明,各级飞行段晃动均是稳定的。

图2 助推飞行段晃动130s俯仰通道开环Bode图Fig.2 Open-loop Bode Diagram of Pitch Channel Sloshing at the Boost-flight Phase 130s
对于CZ-5B任务,一级氢箱防晃板减配后助推飞行段和芯级飞行段个别秒点出现“极-零”现象,频域稳定不能做到幅值与相位双稳定,时域仿真表明晃动幅值较小,引起的晃动惯性力也小,晃动不发散,因此不影响姿态稳定性。
3.2 芯一级飞行段晃动分析
对CZ-5芯一级飞行段进行仿真,采用1.1节中的刚体、晃动、弹性动力学方程,姿态控制取额定状态,时域仿真结果见图3~5,图中0 s对应芯一级飞行段初始时刻,为绝对飞行时间175 s,从仿真结果可知,一级氢箱防晃板减配后仿真出现了明显的晃动现象,但是火箭飞行过程中全程姿态稳定。

图3 芯一级飞行段俯仰姿态动态Fig.3 Simulation of Pitch Attitude During the First Core Stage
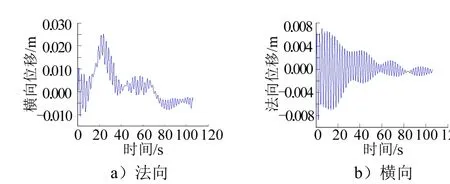
图4 芯一级飞行段氧箱晃动位移Fig.4 Soshing Displacement of the First Core O-tank
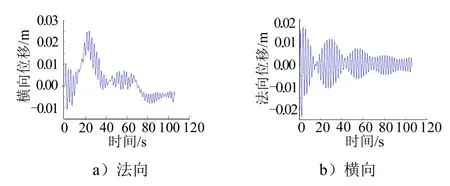
图5 芯一级氢箱晃动位移Fig.5 Sloshing Displacement of the First Core H-tank
3.3 防晃板减配对晃动影响分析
从上述可见,液体晃动对利用系统、增压输送系统、发动机系统能否正常工作均会带来影响。
a)CZ-5助推器氧箱或煤油箱,如果阻尼板数目减少,部分时段晃动阻尼值将降低为设计值的几十到几百分之一,将直接导致液氧或煤油箱晃动无法稳定。又由于液氧与煤油箱晃动质量均偏大,晃动不稳定会导致整个飞行姿态的不稳定,因此试样阶段不再减配。
b)CZ-5/CZ-5B从姿控稳定的角度,一级氢箱防晃板减配后一级飞行段其晃动位移比较小,仿真结果小于0.05 mm,因此取消防晃板在该段对利用系统风险很小。二级飞行段,利用系统全程要调节,取消防晃板后存在大幅值晃动的风险,对利用系统正常工作是不利的,因此二级氢箱防晃板不进行减配优化。
c)一级关机段如果液体出现晃动,发动机存在夹气的风险,国内外火箭均出现过类似的故障现象,因此要确保关机段液体晃动阻尼。目前CZ-5氢箱在底部有“+”子隔板与阻尼板,其中“+”子隔板起到降低晃动质量、提升晃动频率的作用,而阻尼板起到提升阻尼的作用。从确保关机过程安全的角度看,这两个结构是必须要保留的。
d)CZ-5二级采用气瓶增压方式,如果二级氢箱无阻尼,二级一次飞行段很容易出现大幅度液体晃动,晃动位移到滑行段后还会进一步放大。液体大幅度晃动很可能加剧增压气动与液体的热交换过程,消耗增压气瓶的气体用量,出现这种情况对增压系统的设计非常不利。因此二级飞行段氢箱与氧箱防晃板需要保证一定的阻尼作用,抑制推进剂晃动,尽管氢箱晃动质量不大,二级飞行段也不进行氢箱减配设计。
4 飞行结果分析
4.1 一级氢箱防晃板减配前飞行姿态
CZ-5火箭Y1、Y2为一级氢箱6块防晃板的状态,其中第4块防晃板布局在助推关机时刻。晃动阻尼非定常项参数f(t)如图6所示,可知200 s时氧箱与氢箱晃动阻尼相对较低,意味着晃动容易被激励。
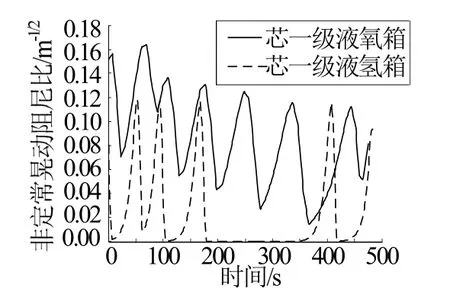
图6 芯一级贮箱晃动阻尼非定常项f(t)Fig.6 Unsteady Damping Ratio f(t) of Tanks during the First Core Stage
CZ-5火箭Y2芯一级飞行段姿控情况如图7所示,可知飞行姿态在175~210 s之间出现明显的振荡。其中,芯一级氧箱和氢箱存在较小的晃动,分析液位抖动频率与氧箱/氢箱晃动频率(设计值:200 s时氧箱频率0.4 Hz、氢箱频率0.41 Hz)一致,可以确认推进剂出现了晃动。飞行姿态表明,晃动得到了较好的抑制。
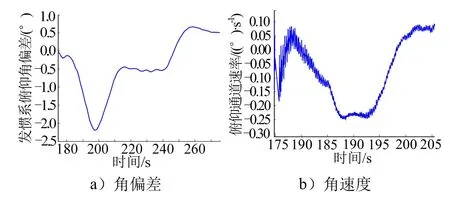
图7 Y2飞行芯一级飞行段姿态Fig.7 Attitude of Y2 Rocket during the First Core Stage
4.2 一级氢箱防晃板减配后飞行姿态
CZ-5 Y3火箭飞行为一级氢箱2块防晃板的状态,Y1、Y2与Y3飞行的一级贮箱液体晃动特性如图8所示。依据利用传感器测量测试结果可知:Y3任务芯一级氢箱在助推飞行段70~120 s、130~170 s,以及芯一级220~250 s左右出现明显晃动,其中助推段晃动位移最大峰峰值约140 mm、晃动位移均是振荡收敛的。比对氢箱液位三角波电压可知,与Y1、Y2相比,Y3飞行氢箱晃动明显变大,为晃动阻尼降低所致。
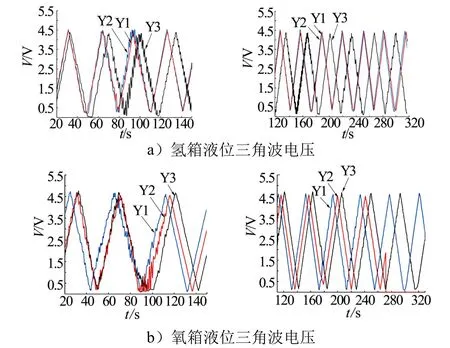
图8 一级贮箱液位测量结果Fig.8 Measurement Results of Y1~Y3 Rocket Fuel Level
CZ-5 Y3飞行结果表明,取消一级氢箱4块防晃板后助推与芯一级飞行段姿态稳定,晃动并未发散。其中姿态角速率中的频率成分主要表现为发动机推力脉冲,液体晃动较小。从图9可见,尽管CZ-5 Y3取消了4块氢箱防晃板,在助推飞行段部分时间段晃动并不稳定,容易在姿态调整等动作下出现晃动,但是由于液氢晃动质量小,氢箱晃动对姿态控制并无明显影响,飞行结果和理论预示分析结果是一致的。

图9 Y3飞行俯仰姿态结果Fig.9 Pitch Attitude of Y3 Rocket during the First Flight Stage
5 结 论
传统液体运载火箭在频域设计时往往要求贮箱的液体晃动为幅值与相位双稳定,当无法保证双稳定时候,至少要求保证单稳定。对于CZ-5一级氢箱,修改设计准则为:频域设计容许部分时间段氢箱晃动不稳定;在时域仿真中,要求氢箱晃动幅值不发散,即在给定的初始条件下,时域仿真的晃动幅值出现振荡,晃动位移不超过极限位移即可。
CZ-5火箭试样阶段通过一级氢箱防晃板减配优化分析,满足了稳定设计的需要,同时有效降低了结构质量,在反复迭代与验证的基础上完善了设计依据,充分体现了CZ-5火箭精细化设计的思想。
猜你喜欢
航空发动机(2022年4期)2022-10-13
军民两用技术与产品(2022年7期)2022-08-06
火炸药学报(2022年2期)2022-05-05
振动工程学报(2019年2期)2019-05-13
振动工程学报(2019年2期)2019-05-13
中国化工贸易·中旬刊(2018年10期)2018-10-21
物联网技术(2016年11期)2017-01-12
科学与财富(2016年18期)2016-12-22
现代商贸工业(2016年4期)2016-10-14
能源研究与信息(2015年3期)2015-11-18