
应用于基础测绘的机载LiDAR高程精度方法研究
2021-10-25 09:18:32刘锋
治淮 2021年7期
刘 锋
(中水淮河规划设计研究有限公司 合肥 230601)
航空激光扫描探测系统(LiDAR,也称机载激光雷达,Light Detection And Ranging),是一种主动式对地观测系统。它集成激光测距技术(Scanning Laser Ranging)、全球定位系统(Globe Position System,GPS)、惯性测量单元(Inertial Navigation System,INS)技术于一体,该技术在三维空间信息的实时获取方面取得了重大突破,为获取高时空分辨率地球空间信息提供了一种全新的技术手段。
本文在江苏省新一轮省级基础测绘工作的基础上,考虑到已建立的第一代数字高程模型未采用最新的地面高程资料,加上江苏大范围区域性地表沉降等原因,精度和现势性差,不能正确地反映地面形态的实际情况,满足不了各方面对数字高程模型的需要。本文研究目的和意义就是提出机载激光扫描测高的技术,通过对机载LiDAR 的数据进行分类处理,并举例分析。
1 机载LiDAR 点云数据的主要特点
机载LiDAR 点云数据的优缺点见表1。

表1 机载LiDAR 点云数据的优缺点表
2 实验区LiDAR 点云数据精度分析
试验区机载LiDAR 扫描的数据平均每平方米的点距为0.126m。本文把试验区划分为4 幅图幅,分别命名为1、2、3、4。本文选取利用4 幅图幅中处于不同地形的各种数据,总共158 个点位,主要包括道路、农田和桥上三种地形,这三种地形在实际试验中也是最多的地形。就选取的地形,本文对其点位坐标作出具体的分析和处理。已有高程成果对LiDAR 测高数据进行检测,是利用高程点的位置(x,y),提取相同位置(同名点位)处的LiDAR 测高数据高程,然后对二者的高程和LiDAR 高程进行差值比较。实验区158 个外业监测点和机载LiDAR 测高数据相比较,本文详细分析了RLiDAR-RRTK差值,在道路、农田、桥上等不同的地形表现的差值不同,在整体上呈现出系统误差的状况。
由表2 可以看出,所选区域高程检测的粗差率为0.063%,中误差为27.10cm,检测结果表明,LiDAR 数据高程精度不高,不能满足对一般基础测绘的需求。本文实验区的实例,由于LiDAR 高程计算的数学模型计算,LiDAR 测高具有系统偏差。
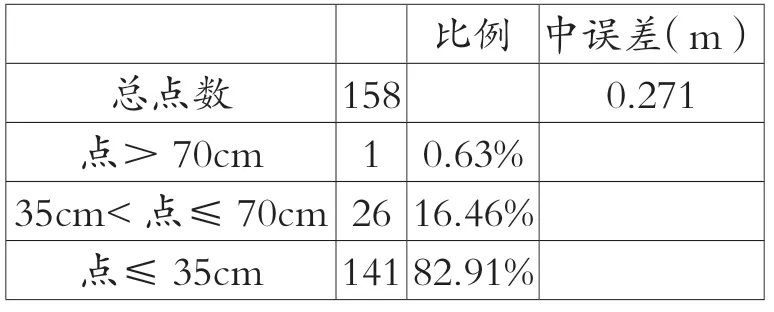
表2 外业RTK 检测数据与LiDAR测高数据差值统计表
3 机载LiDAR 高程精度的方法研究
在机载LiDAR 测量,其系统误差源比较复杂,难以直接由观测手段予以消除。目前,系统偏差的常见补偿方法主要有:附加系统参数法、附加系统权、最小二乘配置法和半参数模型等4 种方法[3][4]。根据点云数据和检测数据的情况本文选择神经网络算法。
3.1 神经网络算法模型
人工神经元的结构模型如图1 所示。
图1 中,x1,x2…xn为输入信号,μi为神经元内部状态,θi为阀值,Pij为μi到μj连接的权值,f(x)为激发函数,yi为输出,则上述的函数模型可以表述为:
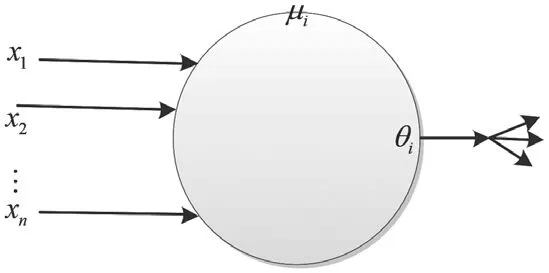
图1 神经元结构的数学模型图

每一个神经元的输入接受前一级神经元的输出,因此,对神经元i 的总作用σi为所有的输入的加权之和减去阀值,此作用引起神经元i 的状态变化,而神经元i 的输出yi为其当前状态σi的函数。上面都是针对稳定状态来说的,假如考虑到反映时间的问题,那么必须用微分方程来表示神经元的状态变化。
3.2 神经网络算法介绍
BP(Back Propagation 神经网络)算法是目前工程上使用最广泛的网络[5]。BP 网络不仅有输入层节点,输出层节点,而且有隐含层节点(隐含层可以是一层或多层)。对于输入信号,要先向前传播到隐含层节点,经过激活函数后,再把隐含层节点的输出信息传播到输出节点,最后给出输出结果。神经网络算法模型结构见图2。

图2 神经网络算法模型结构图
节点的激活函数通常选取标准的Sigmoid型函数:

3.3 神经网络算法模型建立
对于机载LiDAR 测高系统偏差补偿,尝试了多种方法、各种方法尝试了多种不同组合。经过比对,神经网络方法补偿效果最好。现将最终处理方案的处理结果介绍如下。假设系统偏差Δh的模型为:

式中: (x,y)为点位平面坐标,p 为点的地物类别。地表类别分为:道路、农田、丘陵、河流等比较有特征信息的地物点位信息[6]。利用神经网络算法来模拟系统偏差Δh,其BP 网络结构模型见图3。

图3 系统偏差的神经网络模型结构图
其中,补偿系统偏差Δh的神经网络BP 模型结构确定三层BP 模型的结构,具体结构为“3×w×1”。(1)输入层元素取3,分别为(x,y,h),即RTK 测得的点位平面坐标和高程坐标;(2)隐含层元素比较多,通过计算本文w=15;(3)输出层就输出一个元素,为Δh=HGPS-HLiDAR,即为系统的偏差值。
本文对试验区的机载LiDAR 的测高数据作出了具体的分析和处理,也分析了存在问题的具体原因。由于外业检测点的精度本身存在一定的误差,所以对应与LiDAR 的测高数据的差值的误差也比较大。所以,在试验区内本文选取25 个比较有特征的而且能够包含比较多的地形信息的点位。外业RTK 测得的这25 个像控点与在机载LiDAR 点云数据中提取的同名点位的LiDAR 测高数据的差值如表3 表示。
对所选的25 个像控点和LiDAR 测高数据做相应的比较,从表3 中得出R'=RLiDAR-RRTK差值中,minR'=-0.300m,maxR'=0.320m,对于这样的精度数据是能够满足LiDAR 点云数据在基础测绘中的应用的。本文通过这25 个像控点,依据神经网络的原理,建立控制点的纠正模型,可以求出系统偏差的模型参数。然后通过建立的控制点纠正模型参数来纠正试验区的LiDAR 测高数据并验证其精度是否满足基础测绘的需求。经过神经网络算法建立模型,25 个像控点的对应的x,y,h 为输入样本数据,RLiDAR-RRTK差值为输出数据。按照给出的数据源,BP神经网络算法通过自主的学习、训练,最后确认最佳的模型。

表3 像控点RTK 测的高程与LiDAR 测高数据比较表
4 实验区内机载LiDAR 测高数据系统误差纠正
因为外业检测点的精度较高,本文将像控点对应的三位坐标作为神经网络输入层的数据,把像控点测得的高程与LiDAR 测高数据的差值:即RLiDARRRTK作为神经网络的输出层数据,隐含层通过BP 神经网络算法的不断训练和学习,最后找到一个能比较适合本试验区数据的模型,通过查看,可以看到这个模型数据均匀分布在试验区中,呈梯度、规则的分布。
通过BP 神经网络建立模型,定义比较明确的输入层和输出层的数据,通过神经网络的不断学习和训练,最后应用建好的模型,对实验区的数据进行重新的数据处理,得到新的一组LiDAR 测高的数据,然后再与已知的外业高程数据相比较,最后得到相对应的新的差值。对重新处理的RLiDAR-RRTK差值进行分析,得到外业RTK 检测数据与LiDAR 测高数据差值,如表4 所示。

表4 外业RTK 检测数据与LiDAR 测高数据差值统计表
经过统计分析,RLiDAR-RRTK的中误差为0.231m。从全部图幅的统计情况看,模型改进后,整体高程精度由0.271m,提高至0.231m,提高4cm 左右,粗差基本保持稳定,略有减少。虽然LiDAR 数据的高程精度提高的有限,仅为4cm,但是高程的优良率(中误差优于0.271m)有明显提高。
5 结语
机载激光技术在三维地球空间信息的实时获取方面产生了突破性发展,为获取高时空分辨率地球空间信息提供了一种全新的技术手段。
(1)讨论了机载LiDAR 数据的误差种类以及对数据质量进行了比较详细的综合评价,重点了解了机载LiDAR 数据的高程误差,并提出了机载LiDAR数据存在的系统误差。
(2)通过在实验区对机载激光扫描测高技术进行的实地验证,应用BP 神经网络算法建立模型并对实验区内数据进行了系统误差的纠正,得出了该技术所获取的数据在三维空间位置精度可以满足基础测绘的需求
猜你喜欢
西部交通科技(2021年9期)2021-01-11 12:55:36
当代陕西(2020年23期)2021-01-07 09:24:44
高师理科学刊(2020年2期)2020-11-26 06:01:32
智能建筑与智慧城市(2018年11期)2018-11-28 09:04:14
中国资源综合利用(2017年2期)2018-01-22 02:45:02
中成药(2017年6期)2017-06-13 07:30:35
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:41
中国房地产业(2016年2期)2016-03-01 01:25:35
全球定位系统(2015年4期)2015-02-28 12:38:13
安徽工业大学学报(自然科学版)(2014年4期)2014-07-11 01:45:54
