基于压缩感知的无人机航拍遥感图像动态重构方法
2021-10-12 06:09:32马广迪杨为琛
北京测绘 2021年9期
马广迪 杨为琛
(浙江国遥地理信息技术有限公司, 浙江 湖州 313200)
0 引言
目前无人机航拍遥感图像动态重构技术的发展趋势主要有两个:一是通过拓宽遥感图像数据采集检测范围进行动态重构;二是通过提高特征数据匹配率进行图像重构。随着近年来遥感影像数据不断增加,无人机航拍图像特征多样性和数据量也不断增长,在此环境下,图像重构技术需要不断进行优化改进,才能获得准确有效的数据。基于此,提出基于压缩感知的无人机航拍遥感图像动态重构方法[1]。由于当前无人机航拍遥感图像的特征采样率受到极大限制,需要尽可能多地对动态图像的测量数据进行深入采集,进一步对压缩图像编码过程进行简化和去噪处理,对图像重构过程中的大量冗余数据进行排除。保证海量遥感图像数据的高效传输与存储效果,实现高质量的遥感图像重建,在降低数据存储量的同时,提高了图像处理效率。
1 无人机航拍遥感图像动态重构
1.1 无人机航拍遥感影像降质模型
构建无人机航拍遥感影像降质模型,对无人机航拍遥感图像特征进行采集和解算处理,获取超分辨率退化模型,以此反映高分辨率目标图像和低分辨率观测图像之间的特征映射关系,以及无人机航拍遥感图像退化的原因。假设目标图像采集坐标为X(n),其中n代表无人机航拍遥感图像采集过程中获取的未失真连续信号;Y(k,i)为遥感图像序列;D为降级离散图像特征等级且D=1,2,…,p;Bk为无失真地转换为离散数字特征参数,Mk为形变矩阵,结合降质观测模型对无人机航拍遥感影像原始数字图像特征进行计算,具体算法如下:
(1)
在此基础上,进一步对无人机航拍遥感图像的多帧图像超分辨率参数进行重构[2]。若无人机航拍遥感图像动态分辨率图像的尺寸为N=L1N1×L2N2,L1,L2分别表示的是横向和纵向的降采样因子,经过降质后的每幅低分辨率图片的尺寸为N1×N2;参数H1,H2分别表示水平和垂直图像采集范围;特征因子Lmin,Lmax分别为无人机航拍最大和最小移动距离高分辨率图像的重建;t表示低分离率图像对应的帧数;Bin表示模糊图像帧数;Din表示图像特征参数采样矩阵;Gin表示加性噪声数值。进一步对单幅图像进行超分辨率重建处理,在航拍过程中,受外界干扰等因素影响,易出现图像模糊、噪声附加干扰等问题,导致航拍图像的分辨率极低,为此,需要首先对单帧图像超分辨率重建模型特征进行描述,具体算法为:
(2)
基于上述算法,进一步进行遥感图像的变换域重构,当信号为可压缩或稀疏时,通过线性投影可采集少量的实测数据,若遥感图像的变换特征向量为vzin,若图像中只有一个待转换特征元素记为K,且K≠0,航拍遥感图像稀疏性为m,约稀疏性为m′。在进行无人机航拍图像降质处理的过程中,随机投影测量矩阵为a×b,图像特征维测量值为y,且y≥m-m′,进一步对船舶航拍遥感图像特征原始采样信号进行压缩处理记为ψ,进一步规范原始信号的全部信息记为x,A为信息算子,压缩采样后的最少量实测值进行重构,具体算法为:
Δηminx‖ψx‖ps.t.y=Ax
(3)

(4)

1.2 遥感图像降噪预处理
为了更好地实现遥感图像的动态重构处理效果,需要对遥感图像进行降噪预处理,通过分块处理减少计算量,对小图像块特征进行智能分解,将采集到的无人机航拍图像分解成低频近似数据,并对图像的水平、垂直和对角方向特征频率细节进行降噪处理[4]。对于噪声干扰区域进行图像频域去噪分解处理。将分解后的子图像根据不同分辨率参数进行层次化去噪,具体过程如图1所示。
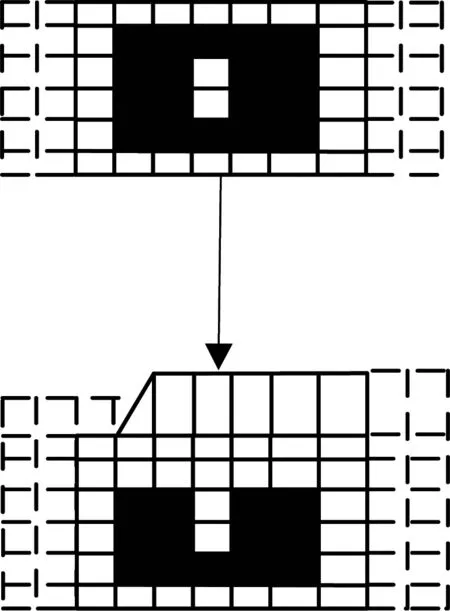
图1 图像细节层次化去噪原理
进一步结合压缩图像理论,进行图像特征噪声干扰稀疏性进行采样分析,在小图像块中对特定的变换域上进行量测和解码重构处理[5]。根据图像的噪声干扰稀疏性对浪费的资源进行再匹配,保证在噪声干扰情况下图像仍可不失真地进行重构,实现对图像进行降噪预处理的研究要求,在进行图像去噪和编码采样的过程中,需要对采集到的图像特征信号稀疏进行变换域处理,并在变换域处理后,进行后续降噪和信号重构处理,提高信号降噪处理精度。无人机航拍图像像素点经过多项式变换后,分布不均,需要进行重采样[6]。该方法通过对图像关键素点阵列坐标变换素点灰度值,分析素点之间的关系,对原始图像进行重采样,建立新的图像矩阵,导致无人机航拍图像受光照时产生很大的亮度噪声,为消除噪声,必须对图像进行平滑处理。为保障降噪处理的精度,需要对遥感图像进行噪声稀疏性指标判断,若在判断过程中,采集到的图像干扰元素较少,且不为零,则认为噪声干扰信号稀疏较低。基于此,需要进一步对信号处理步骤进行优化[7]。结合小波变换原理对图像小波域特征进行数值修复处理,从而更好地恢复原始图像。具体处理步骤如图2所示。
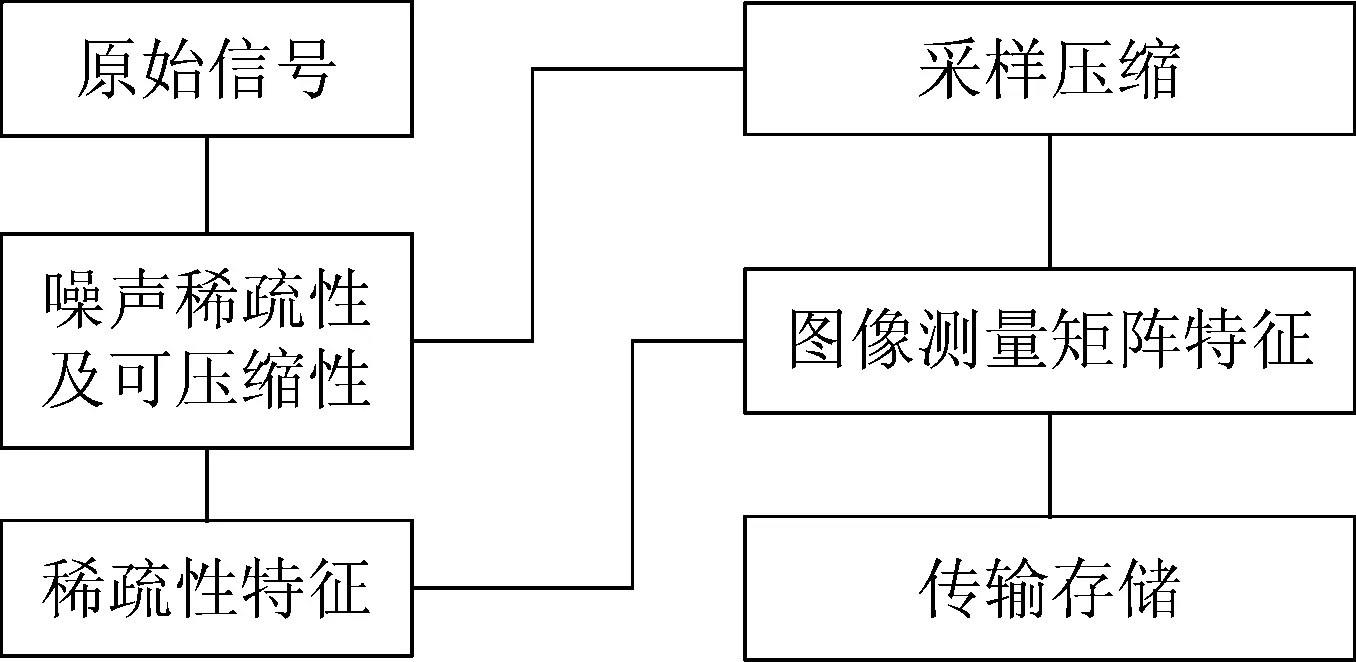
图2 原始图像降噪修复
基于上述降噪修复要求,对降噪算法进行优化,进一步采用迭代软阈值算法(Iterative Soft Thresholding,IST)对压缩图像收缩门y限进行规范,进一步提出通用门限函数算法,更好地实现压缩图像及小化降质处理要求,具体算法如下:
(5)
基于上述算法,对无人机遥感图像进行分割,将其划分成大小相同、互不重叠的小图像块进行采样、压缩和降质预处理[8]。对一般分辨率图像进行精准去噪,有效解决压缩感知图像特征,以提高每个小图像块的分辨率和压缩速度。假设采集到的遥感图像中存在稀疏信号θi∈R和图像采集空间ψi∈R,基于此进一步对去噪图像修复算法进行规范,规范结果Δε如下:
(6)
基于上述算法,进行无人机航拍遥感图像的动态重构处理。基于图像特征重构要求,对压缩图像进行特征采样和解码处理,提高动态图像重构算法的精度和速度,成功实现对压缩图像进行精准的分块感知研究要求。
1.3 遥感图像动态重构的实现
在对特征图像进行描述的过程中,需要对图像模糊区域进行精准识别,通过对图像中的噪点区域即模糊区域进行采集检测,并对成像区域特征点扩散特征进行判断分析,结合点扩散函数(point spread function,PSF)卷积原理对图像降晰特征进行分析,并将图像特征转换为反卷积特性[9]。在原始图像和待校正图像之间选取明显特征点,建立图像动态重构模型,并对原始图像和重构图像之间的映射关系进行规范,并对无人机遥感图像中的每一像素进行真实的经纬定位。无人驾驶飞机航拍图像中经过多项式变换后的像素点分布不均匀,需要进行重采样。将图像关键像素的点阵进行坐标变换,得到像素的灰度值,再分析各个像素点之间的关系,重新采集原始图像,建立新的图像矩阵。通过对原图像像素点进行重新采样,将映射关系转换为新图像的对应位置,计算灰度值,生成校正后的图像。进一步对遥感图像动态校正步骤进行优化,具体校正步骤如图3所示。
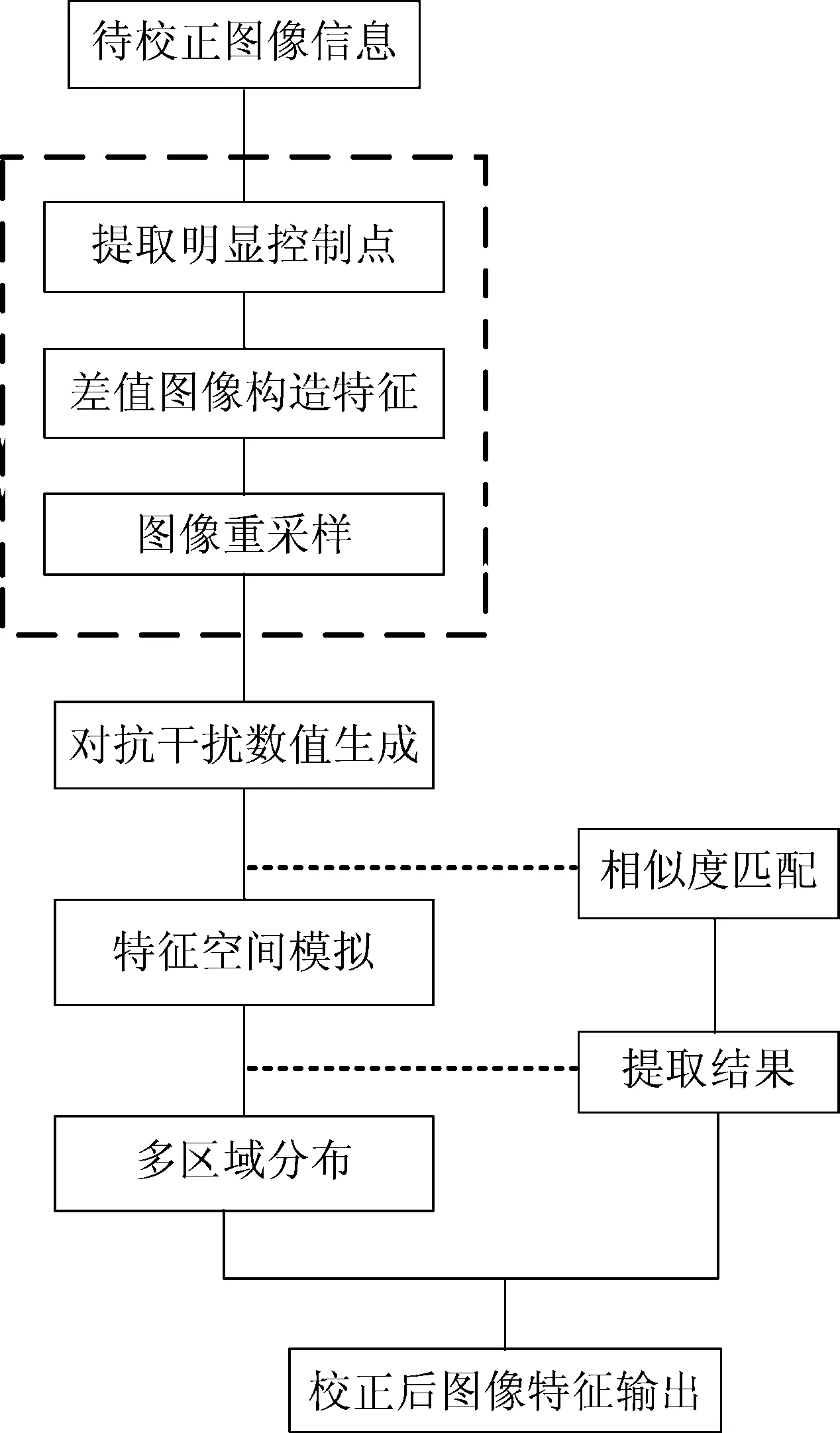
图3 遥感图像动态校正步骤

(7)

(8)
基于上述算法进行图像重构,航拍图像几何校正是对原始图像进行质量修正,以满足关键目标点间距测量结果的高精度要求,也就是确定图像上像素坐标与实际关键点坐标之间的关系,从而反映两者的映射关系。为保障处理效果,简化图像动态重构精度,对无人机图像动态重构步骤进行优化,具体如图4所示。

图4 图像动态重构步骤
基于上述步骤,对压缩图像进行动态识别和重构,最大程度上保证图像重构精度和提升处理,有效保证图像动态重构精度。
2 实验结果分析
为验证基于压缩感知的无人机航拍遥感图像动态重构方法的实际应用效果,进行实验检测,对同一无人机航拍图像进行了数值分析,选取4幅尺寸为256 mm×256 mm,分辨率为96×96 dpi的无人机遥感采集影像作为实验样本,对比传统方法进行图像重构的性能评价,并记录实验检测结果。在实验过程中,以压缩感知图像指数的峰值信噪比为评估标准进行对比,信噪比越高,则说明重建图像的质量越好。
为保障实验研究效果,对实验环境进行统一设置,实现设备选取酷睿8600CPU,数据处理软件选择Matlab7.12.0软件,在4 G主频环境下进行模拟实验。在实验中,利用高斯随机投影矩阵对4幅原始遥感图像进行随机采样,从而更好地得到图像采样特征频率,进一步利用本文提出的重构算法进行图像特征的重建。利用JAVA和C++程序编写原理进行数值分析,以5~3 210 MCPU@2.50 GHz为硬件环境进行数值分析,验证了无人机航拍遥感图像动态重构的关键目标点间距测量方法的有效性。对采样率遥感图像进行重建,对不同的图像重建方法得到的峰值信噪对比并记录,具体如表1所示。
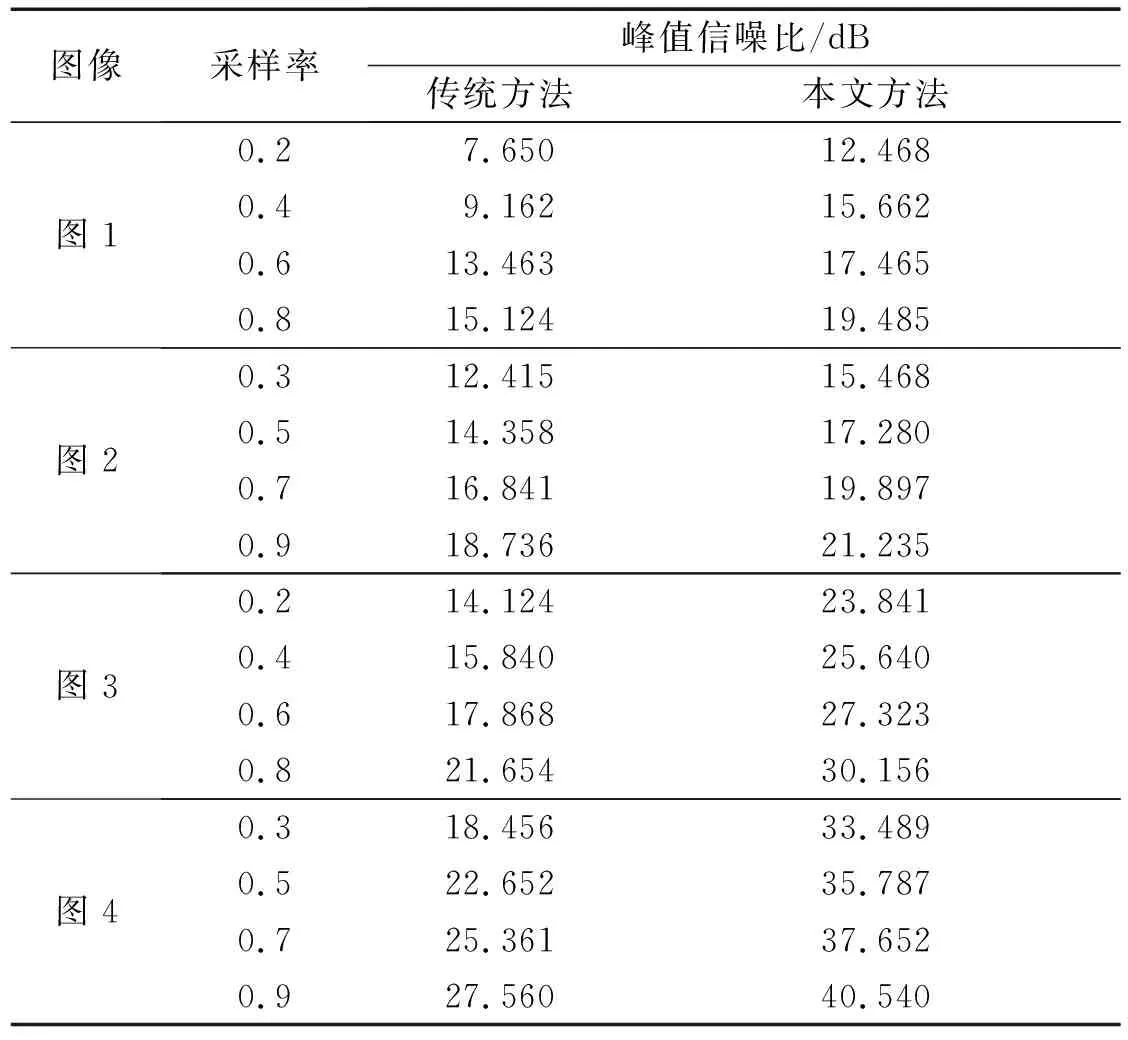
表1 遥感图像采样率重构效果对比
基于表1进行图像动态分析可知,相对于传统方法而言,本文提出的基于压缩感知的无人机航拍遥感图像动态重构方法,在实际应用过程中,峰值信噪比(Peak signal to noise ratio,PSNR)取值明显高于传统方法,可以更好地保障图像动态重构精度,弥补两者在视觉效果上的不足。进一步对传统方法进行重构图像的稀疏性检测和记录,具体检测结果如图5所示。
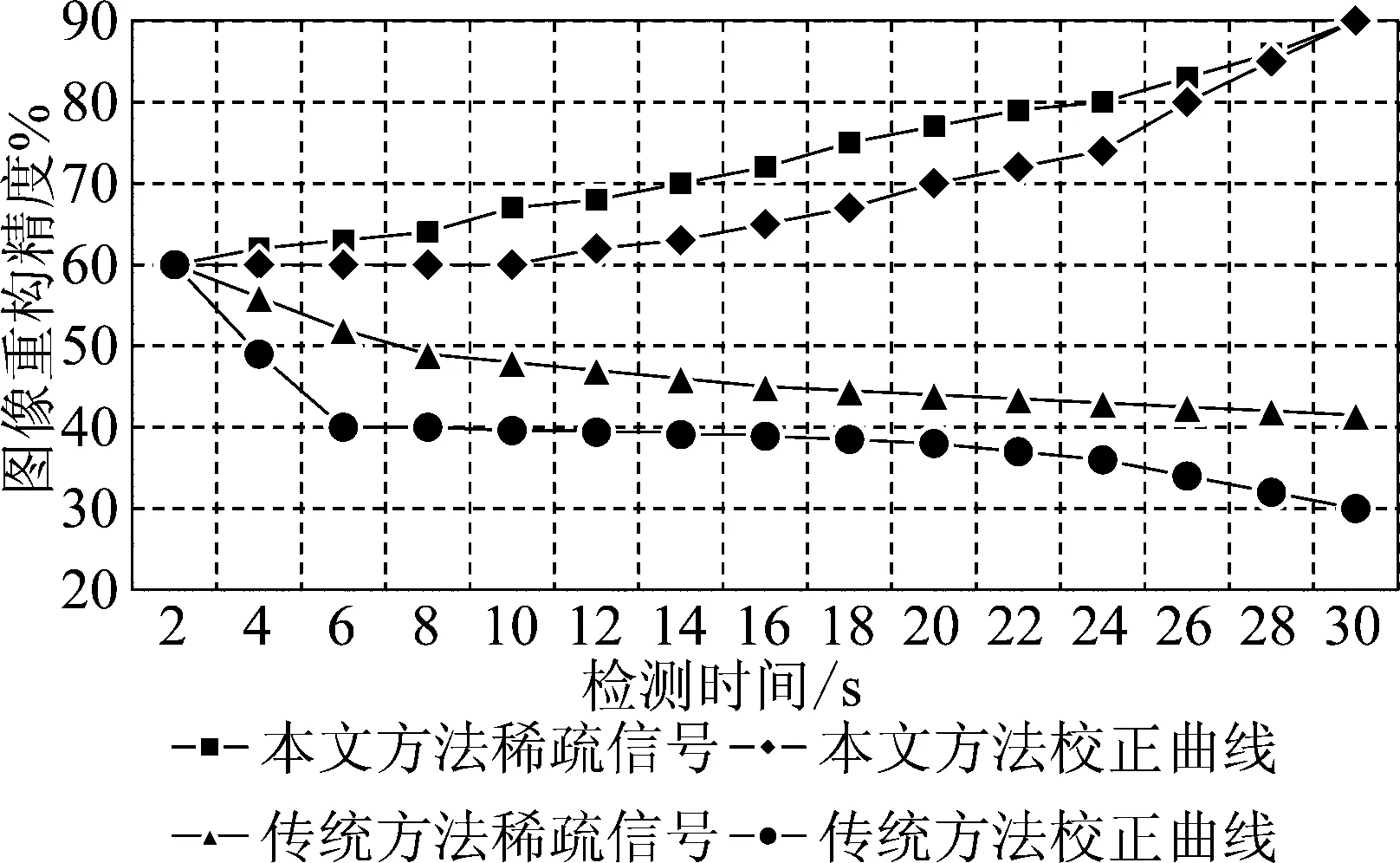
图5 对比实验检测结果
对比图5中的检测结果可知,相对于传统方法而言,本文提出的基于压缩感知的无人机航拍遥感图像动态重构方法在实际应用过程中可以提高图像重构处理效果,保障稀疏度检测精度和校正曲线的稳定上升效果,充分满足当前研究要求。
3 结束语
为提高遥感图像动态重构效果,提出基于压缩感知的无人机航拍遥感图像动态重构方法,采用广义迭代收缩算法对遥感图像动态重构模型进行优化求解,调整图像重构最优参数,减少数据间的冗余信息,从而减少重构时的观测数据量。研究证实,本文提出的基于压缩感知的无人机航拍遥感图像动态重构方法具有计算简单、效率高、运算复杂度低的优势,可以更好地保护图像边缘和细节,得到高质量的遥感图像。
猜你喜欢
摄影世界(2022年1期)2022-01-21 10:50:14
中外文摘(2021年10期)2021-05-31 12:10:40
数学物理学报(2019年3期)2019-07-23 01:15:40
知识经济·中国直销(2018年12期)2018-12-29 12:22:14
家庭影院技术(2018年9期)2018-11-02 05:31:32
小学生优秀作文(低年级)(2018年6期)2018-05-19 01:54:27
商周刊(2017年6期)2017-08-22 03:42:36
作文通讯·高中版(2017年6期)2017-07-10 03:21:34
自动化学报(2017年5期)2017-05-14 06:20:52
成都信息工程大学学报(2017年6期)2017-03-16 03:04:32