Lurie网络控制系统稳定性分析与镇定控制器设计
2021-10-07 09:43彭天顺
电子乐园·中旬刊 2021年2期

摘要:稳定性是系统正常运行的首要条件,在保证系统性能的前提下提供尽可能大的传输间隔在网络控制系统中具有重要意义。基于双边闭环函数框架,本文构造了一种新型李雅普诺夫泛函,充分考虑了传输区间内的系统信息,获得了比传统输入时滞模型方法更好的结果。
关键词:Lurie网络控制系统;双边闭环泛函;最大允许传输间隔(MATI),镇定
1引言
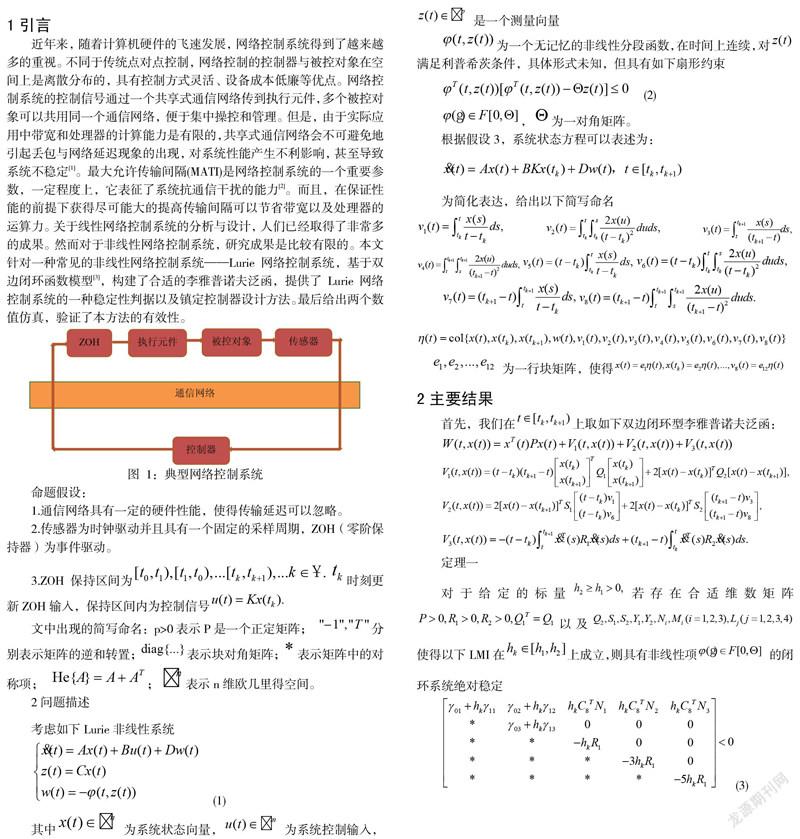
近年来,随着计算机硬件的飞速发展,网络控制系统得到了越来越多的重视。不同于传统点对点控制,网络控制的控制器与被控对象在空间上是离散分布的,具有控制方式灵活、设备成本低廉等优点。网络控制系统的控制信号通过一个共享式通信网络传到执行元件,多个被控对象可以共用同一个通信网络,便于集中操控和管理。但是,由于实际应用中带宽和处理器的计算能力是有限的,共享式通信网络会不可避免地引起丢包与网络延迟现象的出现,对系统性能产生不利影响,甚至导致系统不稳定[1]。最大允许传输间隔(MATI)是网络控制系统的一个重要参数,一定程度上,它表征了系统抗通信干扰的能力[2]。而且,在保证性能的前提下获得尽可能大的提高传输间隔可以节省带宽以及处理器的运算力。关于线性网络控制系统的分析与设计,人们已经取得了非常多的成果。然而对于非线性网络控制系统,研究成果是比较有限的。本文针对一种常见的非线性网络控制系统——Lurie网络控制系统,基于双边闭环函数模型[3],构建了合适的李雅普诺夫泛函,提供了Lurie网络控制系统的一种稳定性判据以及镇定控制器设计方法。最后给出两个数值仿真,验证了本方法的有效性。
命题假设:
1.通信网络具有一定的硬件性能,使得传输延迟可以忽略。
2.传感器为时钟驱动并且具有一个固定的采样周期,ZOH(零阶保持器)为事件驱动。
3.ZOH保持区间为时刻更新ZOH输入,保持区间内为控制信号
文中出现的简写命名:p>0表示P是一个正定矩阵; 分别表示矩阵的逆和转置;表示块对角矩阵;表示矩阵中的对称项; ;表示n维欧几里得空间。
2问题描述
考虑如下Lurie非线性系统
结论
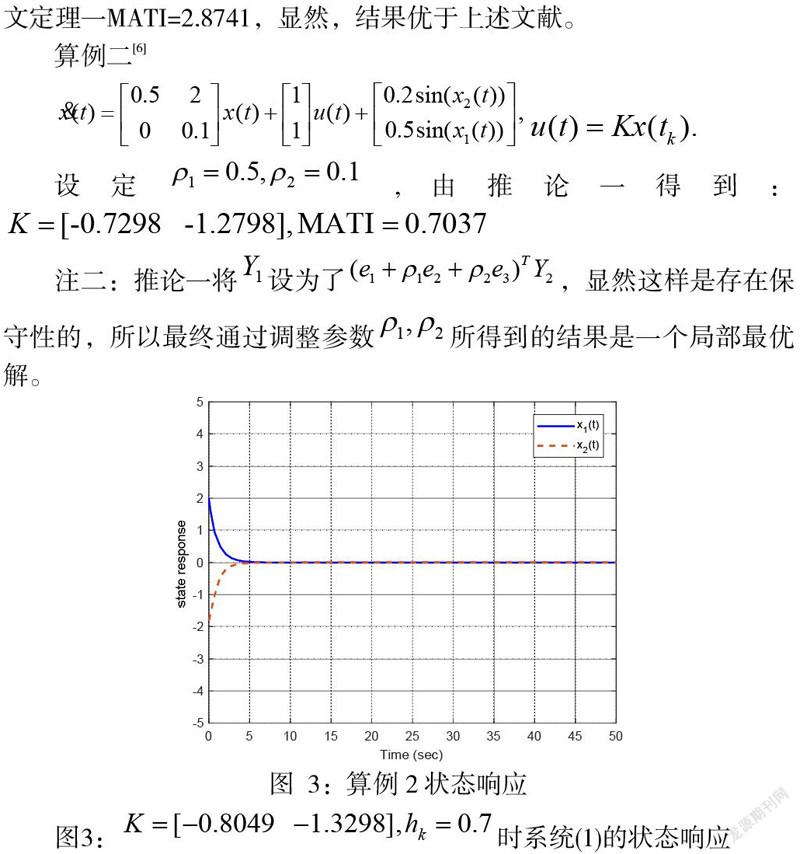
本文构造的双边闭环型李雅普诺夫泛函充分考虑了传输区间的系统信息,数值算例表明本方法效果较好,相比传统输入时滞方法[3],[4]可以获得更高的传输间隔。推论一提出了一种参数调整方法来设计控制器,仿真结果验证了本文方法的正确性和有效性。
参考文献
[1]陈刚. 具有时滞与丢包问题的网络控制系统镇定与滤波[D].中南大学,2012
[2]Hong-Bing Zeng,Kok Lay Teo,Yong He. A new looped-functional for stability analysis of sampled-data systems[J]. Automatica,2017,82:
[3]Hong Bing Zeng,Yong He,Min Wu,Shen Ping Xiao. Absolute stability and stabilization for Lurie networked control systems[J]. International Journal of Robust and Nonlinear Control,2011,21(14):
[4]Eva Gyurkovics,David Eszes. Sufficient conditions for stability and stabilization of networked control systems with uncertainties and nonlinearities[J]. International Journal of Robust and Nonlinear Control,2015,25(16):
[5]Zhang Xian-Ming,Han Qing-Long,Ge Xiaohua,Ding Lei. Resilient Control Design Based on a Sampled-Data Model for a Class of Networked Control Systems Under Denial-of-Service Attacks.[J]. IEEE transactions on cybernetics,2020,50(8):
[6]Guoliang Chen,Jianwei Xia,Guangming Zhuang,Junsheng Zhao. Improved delay-dependent stabilization for a class of networked control systems with nonlinear perturbations and two delay components[J]. Applied Mathematics and Computation,2018,316:
作者簡介:彭天顺,男,汉,1997年11月生,湖南长沙人,硕士,湖南工业大学,研究方向为网络控制、电力系统自动化