提高车载平视显示器观看亮度的微结构膜设计
2021-10-04 11:46庹长富吕国强徐立业冯奇斌
光学精密工程 2021年8期
庹长富,吕国强,徐立业,冯奇斌,王 梓*
(1.合肥工业大学 仪器科学与光电工程学院,安徽 合肥 230009;2.合肥工业大学 特种显示技术国家工程实验室 现代显示技术省部共建国家重点实验室光电技术研究院,安徽 合肥 230009;3.合肥工业大学 电子科学与应用物理学院,安徽 合肥 230009)
1 引 言
车载平视显示器(Head Up Display,HUD)是将汽车行驶信息以及导航、短信、电话和邮件等信息进行图像化后,通过光学元件和挡风玻璃形成的成像系统在人眼视野前方2~5 m处形成虚像的一种辅助驾驶工具。据统计驾驶员驾驶过程中低头查看仪表信息的平均时间约为1~3 s,以城市道路60 km/h的平均车速计算,驾驶员注意力离开路面3 s,相当于闭着眼睛驾驶50 m,因此导致了很多的交通事故[1]。抬头显示技术可以一定程度上缓解驾驶信息交互和行车安全之间的矛盾。
车载HUD主要有挡风玻璃HUD(Wind‐shield HUD,WHUD)和组合型HUD(Combiner HUD,CHUD)两类。前者显示效果好,成本较高;后者联动性差并且需要占用额外的空间,但其价格便宜,使用范围广。随着我国汽车市场的不断增大,以及人们安全意识的不断提高,对车载HUD的需求不断增加。车载HUD的质量要求也不断提高,如更高的显示亮度,更好的成像质量,更强的环境融合效果,以及同样显示质量下更低的能耗等。近年来,武晨晨等人通过设计光学微结构膜提高车载HUD微投影系统的背光亮度,以提高像源图像的亮度从而提高HUD的显示亮度[2];欧高焓等人针对具有高的成像质量和环境融合效果的车载AR-HUD,设计了一种基于离轴反射的汽车AR-HUD光路系统[3];Yan等人设计并制作了用于微型平视显示器的微结构膜[4];Okumura等人制作并分析了反射式微结构阵列对HUD成像质量的影响[5]。但是,目前对于优化系统提高系统光效等方面的研究还比较少。
本文分析了HUD固定的眼盒观看区域外依然存在投影光线的原因,通过分析HUD成像系统的等效光路,计算出每个像素点上散射光线完全进入Eyebox区域内时的散射角度,并设计光学微结构将该角度以外一定范围内的光线调控至Eyebox区域内。
2 分析和设计
2.1 车载HUD系统
车载HUD系统的基本结构如图1所示,主要由信息图像化处理单元(Picture Generation Unit,PGU)、微投影系统和反射式成像系统三部分组成。PGU将显示信息转换成图像数据传输给投影仪,投影仪将图像投射到散射屏幕上形成像源图像;散射光线进入与之匹配的反射成像系统中,最后反射到使用者的眼部附件附近形成Eyebox。

图1 车载HUD系统的基本结构Fig.1 Basic structure of vehicle HUD system
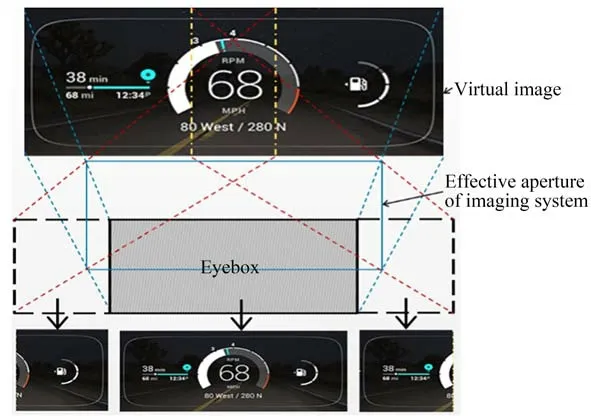
图2 HUD系统的杂散光Fig.2 Stray light in HUD system
2.2 设计参数的分析与推算
HUD反射成像系统的等效光路如图3所示。其中,OE表示具有一定焦距f的透镜组,用于对像源图像在观看侧进行成像,所成的实像就是在Eyebox区域内透过挡风玻璃观看到的虚像的物;θA和θT分别表示投影散射屏幕在水平方向的实际散射角和最适散射角,根据屏幕亮度视角的定义,这里将θA和θT定义为散射角度的半高半宽(Half Width at Half Maxim,HWHM),即亮度值下降为最大亮度50%处的角度。为了方便描述,将投影仪发出的光线称为主光线,主光线在散射屏幕上发生散射后与主光线传播方向不一致的光线称为散射光线。通过分析HUD系统的等效光路可以发现,投影光线投射到Eyebox观看区域以外的主要原因有:(1)散射屏幕的实际散射角θA过大,如图3(a)所示,对于第i列像素点发出的具有一定发散角度的光线,当θA>θT时,散射光线进入成像系统后投射到Eyebox以外的区域;如图3(b)所示,当θA=θT时,投影光线刚好全部投射到Eyebox区域内,此时的散射角度θT为最适散射角度;(2)投影仪发出的主光线经过成像系统后,没有会聚在Eyebox中心点处,导致分布于主光线两侧的散射光线总会有一侧的部分光线落入Eyebox区域之外。

图3 车载平视显示器的光路Fig.3 Optical path of head-up display rehicle
这两个影响因素之间也存在着一定的联系。根据调研,设置其固定的系统参数如表1所示。表中,Dev为Eyebox到虚像之间的距离;Le为Eye‐box的 尺 寸 参 数;Dew为Eyebox到 挡 风 玻 璃 之 间的距离;Lv为虚像尺寸;Dwo为挡风玻璃到OE之间的距离;Ls为像源尺寸;Dwv为挡风玻璃到虚像之间的距离;Dos为OE到像源之间的距离;x为屏幕上任意一点到屏幕中心的距离;h为投影距离。记第i列像素的中心点的位置xi为该列像素点的计算位置,基于屏幕的对称性,因此只考虑屏幕上右半部分像素点的情况,xi=(i-0.5)×d(i=1,2,…,640),d为像素宽度。根据放大率γ公式(1)、高斯成像公式(2)以及等效光路的几何关系[5,8],可得第i列像素的最适散射角θiT的表达式为:
表1 HUD系统参数表Tab.1 Parameters of HUD system

由散射屏幕的散射特性可知,θiT的角平分线就是xi点发出的主光线,且该光线过Eyebox中心点,再根据式(1)和式(2)可推导出该列像素点上任意点x的主光线偏转角βi(x)为:

由此得到屏幕上所有像素点主光线的偏转角度。
2.3 微结构的面型设计
为了解决上述2个问题,微结构面型设计主要有两个步骤:首先分析图3所示的等效光路,计算主光线需要通过微结构所达到的偏转角度,并根据这组关系计算出一个菲涅尔透镜实现投影主光线的偏转。但是由于散射屏幕的散射角度过大,因此下一步是将每列像素点发出的散射光线收缩至式(3)计算的最适散射角度θiT。
微结构膜在应用时与散射屏幕的距离非常贴近,微结构与像素点的宽度均在几十微米量级,因此需要将每列像素点看作一个独立的扩展光源进行微结构面型设计。针对收缩扩展光源调控面型的设计,Wu等人提出了一种根据特定的输入、输出条件进行迭代计算的方法[9]。但是该方法只适用于扩展光源能量为对称分布的面型,且确定初始面型的方法没有与特定输出条件相联系,导致最后结果与特定输出条件之间存在一定的偏差。
据介绍,加拿大是世界上最大的氯化钾生产国和出口国之一,已知储量为几十亿吨,按目前全世界的需求水平来计算,可供开采几百年,加拿大目前的氯化钾生产能力达到3000万吨/年。自1972年成立以来,加拿大钾肥公司已销售近2亿吨钾肥,覆盖60个国家,超过125位客户,其中已累计向中国供应4000多万吨钾肥。
本文在上述方法的基础上提出了一种针对扩展光源能量分布为非对称分布的面型设计方法。该方法在确定扩展光源输入和输出条件的前提下,将能反映输出特点的偏转面型作为计算完整面型的初始面型,然后通过迭代计算实现对初始(偏转)面型的优化补偿,得到满足要求的完整面型。迭代计算的过程是在初始面型上划分出n个等间距的采样点,从初始面型的一端开始计算扩展光源的边界光线在一个采样点处的出射角度,并保持面型上该采样点以后的所有采样点处出射光线都为该出射角度;通过光线反向追迹确定计算点处出射光线在扩展光源上的入射亮度,根据在微结构面型上各点处以特定角度出射的光线的亮度积分等于出射光线在该角度下的光强这一性质[10],在初始面型另一端的端点的切线上计算出一个新的面型数据点。重复上述计算过程,直至面型上某一采样点上的出射光线的角度等于式(3)计算的最适散射角度,此时迭代计算结束。
2.3.1 偏转面型计算
本文根据式(4)进行具有偏转作用的菲涅尔透镜的设计。图4(a)所示为主光线偏转示意图。根据实验所使用的投影仪的参数可知,主光线入射角为:θ(x)=actan(x60),x为各列像素点到屏幕中心垂线之间的距离,偏转面型的作用就是将θ(x)偏转到βi(x),使所有像素点中心的主光线均会聚于Eyebox中心点,中心点两侧的主光线按理想光路的成像特性分布在像素中心点两侧。图4(b)为计算的初始面型的部分面型,C1iC2i为第i列像素点所需要的偏转面型,其宽度等于像素点的宽d。

图4 初始面型Fig.4 Initial profile
在进行面型迭代计算之前,需要先根据实际情况确定输入和输出的条件。如图5(a)所示,当入射光线以一定角度θ(x)穿过散射屏幕上一点时,其光线能量分布一般为余弦-幂函数,且对称分布在θ(x)的两侧[11-12]。因此,建立散射屏幕上各点的亮度函数L(x,α):

式中α为该点处散射光线的角度范围,满足α∈[θ(x)-θA,θ(x)+θA]。对实验所使用的散射屏幕进行测量得θA=±22°,根据对θA的定义取式(5)的幂指数为9;L0为待定系数。因此,散射屏幕上单列素点i在散射角α范围内的总光通量∅Diff为:

由于投影图像具有很好的亮度均匀性,可将投影光线设置为朗伯发光强度:I=I0×cosθ,则单列像素点i上的总光通量∅Pro为:

假设系统为能量无损系统,则有:∅Diff=∅Pro,由此确定出L(x,α)中的参数L0。
如图5(b)所示,对于每一列像素点i的输出目标光强函数Ii(δ),应该具有两个必要的特征:(1)Ii(δ)应是一个HWHM值 为θT的函数;(2)由于输出函数是一个光强函数(定义一个点的能量分布),即需要以该像素宽度上某一点的特征来代表整个像素点的特征,因此以该像素上中心点xi处主光线的出射角度βi(xi)作为整个像素点输出光强函数的特征。结合输入函数的特点,将第i列像素点的输出光强分布函数假设为:


图5 输入输出条件Fig.5 Input and output conditions
其中:δ为该像素点输出光强的角度范围,满足δ∈[βi(xi)-θT,βi(xi)+θT],Ii0为待定系数。根据2.2对θiT的推算,取式(8)的幂指数为26,则出射光线在δ范围内的总光通量∅out可表示为:

忽略微结构对光线能量的吸收,则有:∅Diff=∅out,由此可确定Ii(δ)的参数Ii0。
2.3.2 迭代面型计算
确定好输入和输出条件后,开始在初始面型C1iC2i上进行迭代计算。根据对输出条件的分析可知,特定出射角度δ是关于βi(xi)对称分布的,因此以βi(xi)为界把微结构的迭代计算分为左右两部分:通过对δ∈[βi(xi),βi(xi)+θT]内 的 遍历,完成对右侧迭代面型的计算;通过对δ∈[βi(xi)-θT,βi(xi)]内的遍历,完成对左侧迭代面型的计算。
这里以像素点i右侧迭代面型的计算为例,对迭代过程进行说明。如图6(a)所示,首先在C1iC2i上的n个等间距采样点Pj(j=1,2,…,n)处对出射角δ1=βi(xi)的光线进行反向追迹,计算入射光线xj Pj在扩展光源S1iS2i上的位置xj和入射 角αj,根 据 式(5)计 算Pj的 亮 度 值L(xj,αj),L(xj,αj)构成一个关于出射光线间距l的亮度函数fδ1(l),记 两 边 界 光 线 之 间 的 距 离 为lδ1,有l∈[0,lδ1];则C1iC2i上的出射光强I(δ1)等于亮度函数fδ1(l)在[0,lδ1]上的积分[10],如下:

根据式(10)在Pn的切线上确定一点Pn+1,使得:I(δ1)=Ii(δ1),Pn+1就是右侧迭代面型上的第一点。如图6(b)所示,连接S2i Pn+1,根据折射定律计算Pn+1点处以δ1角度出射的切线,为计算下一点Pn+2做准备。连接S1i P2,即让扩展光源的左边界点以α2入射,重复计算Pn+1点的方法,在Pn+1的切线上得到Pn+2点及其切线,直到在面型上存在一点Mr,使得S2i Mr的角度α等于S2i点的最大散射角αmax。对于像素点i有:αmax=arctan((xi+0.5d)/60)+θA。根据多次计算的经验发现当α=αmax时,出射光线的角度δmax也在δ=βi(xi)+θT这个最大出射角附近。因此,可以认为完成了右侧迭代面型的计算。
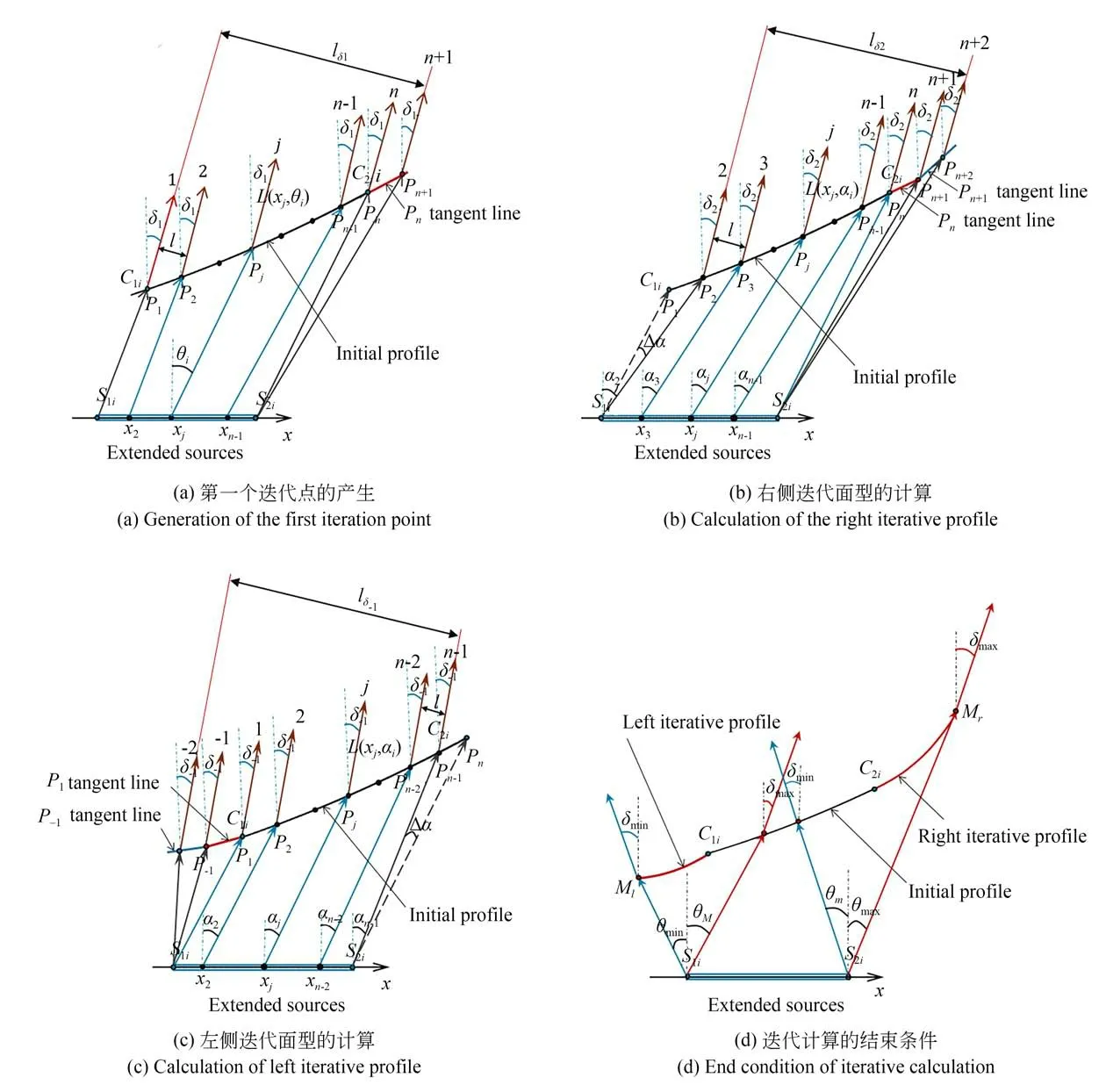
图6 迭代面型计算过程Fig.6 Calculation process of iterative profile
如 图6(c)所 示,对 于 出 射 角δ∈[βi(xi)-θT,βi(xi)]内的左侧迭代面型,计算方法是相同的,不同之处是需要从初始面型C1iC2i右侧的Pn-1点向左侧P1(C1i)点进行亮度积分计算,得到面型上的数据点。直至面型上存在如图6(d)所示的一点Ml,使得光线S1i Ml的入射角度α等于该点最小散射角度αmin=arctan((xi-0.5d)/)60-θA,此时完成了左侧迭代面型的计算。
重复上述计算过程,完成对屏幕上右半部分像素点的微结构面型计算,然后镜像得到左半部分像素点的微结构。最后,将设计好的二维微结构形貌向垂直方向进行拉伸形成柱状光学微结构,实现对该列像素点水平方向散射角度的调控,几乎不改变垂直方向上光线的出射角度[13]。
3 实 验
3.1 设计结果及仿真分析
图7(a)为根据上述设计方法使用MATLAB编程计算的微结构膜的一半,图7(b)为i=640时的微结构面型。该微结构膜是由每个像素点的微结构排列在相应的位置形成,将其镜像得到微结构膜的另一半。
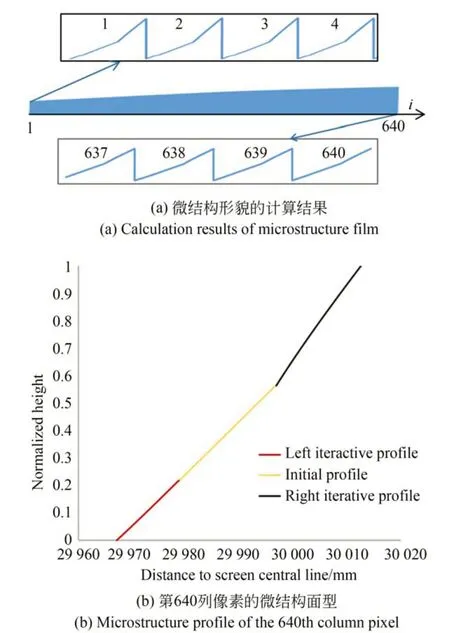
图7 微结构面型Fig.7 Microstructure profile
如图8(a)所示,使用LightTools光学仿真软件对所设计的微结构膜进行建模仿真。以点光源的光线作为投影仪发出的光线,使用远场接收器测量出射光线的空间光强分布。图8(b)为有微结构和无微结构膜时调控方向光强分布的仿真结果。该结果表明,本文设计的微结构增亮膜可以将散射膜的HWHM值从±22°缩小到±14°左右。

图8 仿真结果Fig.8 Simulation results
如图9所示,根据图3等效光路的几何关系,计算像源面型上各点±22°和±14°内的出射光线经过成像系统后在Eyebox平面上的位置,坐标原点为光轴方向。计算发现,有微结构膜时(±14°)进入Eyebox区域的光通量比没有微结构(±22°)时增加了40%左右。图10为使用Light‐Tools光学仿真软件得到的HUD系统仿真模型。图11(a)和图11(b)分别为有无微结构膜时Eye‐box区域内的光强分布,可以看出,有微结构膜时最大光强提高了36%左右,平均光强提高了33.6%左右。

图9 ±22°和±14°光线在Eyebox面的位置Fig.9 Position of±22 ° and±14 ° lights on eyebox plane

图10 HUD系统的仿真模型Fig.10 Simulation model of HUD system
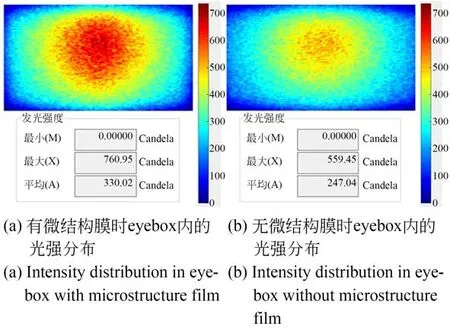
图11 HUD系统的光强分布Fig.11 Intensity distribution of HUD system
3.2 实际加工及实验测试
微结构形貌的加工使用德国Heidelberger公司的MLA100型无掩膜光刻机完成,并使用Carl Zeiss公司的LSM700型激光共聚焦显微镜对加工的微结构形貌进行检测。图12(a)是对实际加工的微结构形貌的检测结果;图12(b)为设计面型与实际面型的对比,可以看出实际加工的面型与设计面型基本一致。以光刻加工的微结构形貌作为模板,采用纳米压印技术将微结构形貌压印到透明的PET材料上,形成如图12(c)所示的微结构增亮膜。
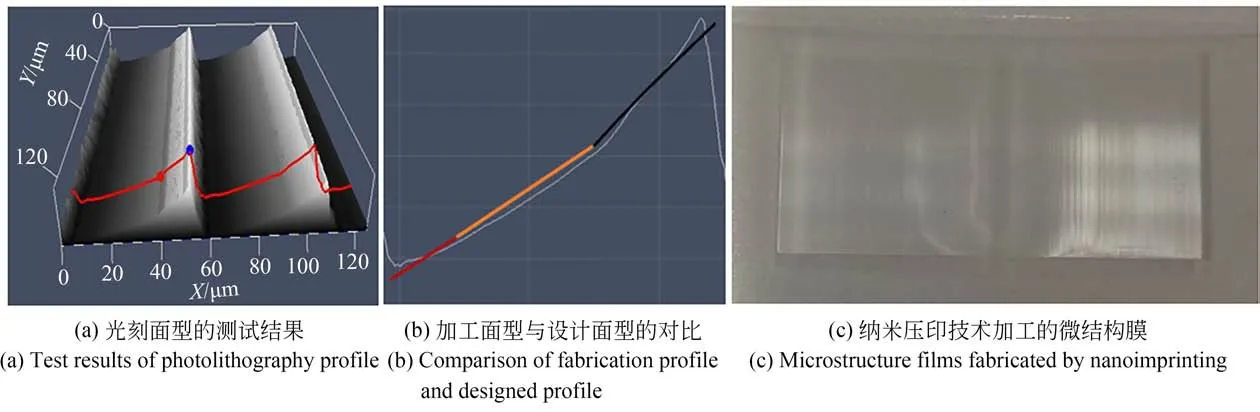
图12 微结构膜加工结果Fig.12 Preparation result of microstructure film
为了测试所设计的微结构膜对HUD系统的增亮效果,本文参照2.1设置的系统结构参数,搭建了如图13(a)所示的HUD实验测试系统。该系统中的OE使用满足口径和焦距需求的菲涅尔投影透镜实现[14],其显示效果如图13(b)所示。图13(c)是使用日本TOPCON公司的BM-7A型亮度计在暗室环境下对虚像上多个矩形亮斑中心点处的亮度进行测试[15],测量点的平均亮度如表2所示。由测量结果可知,在使用微结构增亮膜后其平均亮度约为362.8 nit,比没有微结构膜的情况提高了31.7%左右。
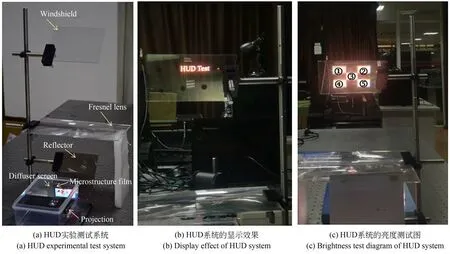
图13 实验设备及结果Fig.13 Experimental setup and results
4 结 论
本文提出了一种微结构膜设计方法,对所设计的微结构膜进行了仿真、加工和检测,得到了与设计形貌基本一致的微结构形貌,然后搭建实验测试系统对微结构膜的增亮效果进行测试。测试结果表明,所设计的微结构膜能有效地将Eyebox区域以外的投影光线调控到Eyebox观看区域内,使该区域的平均亮度提高31.7%左右。该方法不仅提高了HUD的显示亮度和系统光效,同时也减少了杂散光对驾驶人员的影响。
猜你喜欢
现代电子技术(2021年1期)2021-01-17
摄影之友(影像视觉)(2019年3期)2019-03-30
上海大学学报(自然科学版)(2018年5期)2018-11-02
电脑知识与技术(2018年35期)2018-02-27
小天使·六年级语数英综合(2017年5期)2017-05-27
自动化学报(2017年11期)2017-04-04
电镀与环保(2016年2期)2017-01-20
光学精密工程(2016年5期)2016-11-07
现代工业经济和信息化(2016年19期)2016-05-17
公民与法治(2016年23期)2016-05-17