
基于速度积分匹配的旋转调制惯导系统动基座对准方法
2021-09-28 06:36罗星航田晓春
导航定位与授时 2021年5期
罗星航,刘 峰,刘 辉,田晓春
(北京自动化控制设备研究所,北京 100074)
0 引言
现代战争中,空天是机动性十分强的重要战场,机载武器则是空天战场上制胜的利剑。随着机载武器射程的不断增大,要实现机载武器对目标快速、自主、精准的打击,需提升惯性导航系统动基座对准的性能(如对准时间、对准精度),减小对基准信息品质和载体机动等的要求。
由于载体复杂的运动,动基座对准相较于陆基静基座对准不可避免地引入了更多的误差因素(如基准信息误差、动态误差等),导致动基座对准过程中基准信息品质受损,增加了惯性导航误差激励的复杂性,从而引起了附加的导航和观测误差。这些客观因素限制了动基座对准精度与快速性的提升。
国内外对捷联惯导系统空中动基座对准技术开展了广泛的研究[1]。文献[2-3]中,研究人员将自适应卡尔曼滤波理论与速度匹配相结合,通过载机S形机动实现了惯导动基座对准,获得了较好的精度与鲁棒性。刘旖旎对光学捷联惯导系统空中动基座对准技术进行了研究[4],提出了一种分段式速度匹配传递对准方案应用于光纤捷联惯导,试验结果表明,该方法能较好地实现捷联惯导空中对准,载机适当水平机动即可有效缩短对准时间。曲法义等研究了捷联惯导系统速度+姿态矩阵匹配快速传递对准方案[5],通过载机做简单角机动实现了对姿态误差角的估计,但精度受挠曲变形影响。吴枫等提出了一种基于机载全球定位系统(Global Positioning System,GPS)信息的速度+位置匹配卡尔曼滤波精对准算法[6],在加减速或转弯机动下实现了误差量的有效估计。由文献可知,捷联惯导动基座对准技术多利用载体机动来提升对准精度和快速性,但载体机动对武器平台提出了附加要求,增加了武器平台工作的复杂性。
旋转调制是惯导系统实现高精度导航的重要手段。旋转调制惯导系统将惯性测量单元(Inertial Measurement Unit,IMU)固连于转位机构,通过周期性旋转调制惯性器件误差,已广泛应用于静基座对准精度和长航时导航精度的提升;同时,利用旋转调制消除惯性器件误差的优势,可以取消动基座对准对于载体的机动要求。针对卫星测速定位存在随机误差[7-10]、旋转调制惯导存在观测模型建立不准确等影响对准性能的问题,本文提出了一种卫星辅助速度积分方式的旋转调制惯导动基座对准方法,通过提高卫星接收机的观测速率、优化观测模型,在一定程度上改善卫星数据噪声对旋转调制惯导高精度动基座对准的影响,从而提升对准的快速性和精度。
1 旋转调制惯导系统动基座对准原理
1.1 旋转调制惯导误差分析
旋转调制惯导系统相当于在捷联惯导系统的基础上增加旋转机构和测角装置,导航解算采用捷联惯导算法,没有改变旋转调制惯导系统的惯性导航解算方法和惯性器件常值漂移,误差方程与捷联惯导系统一致[11]。
动基座对准过程中,惯性导航解算的结果与基准信息通过卡尔曼滤波进行匹配,以完成对初始误差的估计。为了在保证对准精度的前提下尽量缩短对准时间,本文对准过程中采用单轴正反转的旋转方案,以航向作为旋转轴并进行航向隔离。为适应导弹发射后的超声速环境,脱离机体自主导航过程中惯导系统双端锁紧,为捷联工作状态。
本文中定义惯性坐标系为i系;导航坐标系为n系,按北天东方向配置;载体坐标系为b系,按前上右方向配置;弹体子惯导坐标系为s系,按前上右方向配置。导航坐标系下的姿态和速度误差方程可表示为式(1)和式(2)
(1)


(2)

1.2 旋转调制惯导动基座对准误差方程
速度匹配动基座对准可以兼顾对准精度和快速性,根据惯导系统误差方程,通过加减速或者转弯可以提高航向失准角可观测度,进而提高对准精度。旋转调制惯导由于陀螺漂移和加速度计零偏可以忽略不计,因而可以通过罗经效应[12]实现较高精度的对准,从而取消对准对载体机动的要求和限制。为了获得适合动态情况下基于罗经效应的惯导速度误差方程,忽略垂向速度,惯导速度采用式(3)描述


(3)
速度误差方程如式(4)


(4)
式中,WU为载体垂向比力,通过加速度计进行测量;RM、RN分别为地球子午圈和卯酉圈半径;h为高度。令
(5)
式(5)所示的误差方程建模分离了水平加速度对速度误差的影响。
为了简化旋转调制惯导误差方程,惯性导航解算过程中均采用基准信息计算载体速度引起的导航坐标系的转动,姿态误差方程可表示为式(6)

(6)
2 速度积分动基座对准
对准匹配方式可以依据所选量测参数的不同,分为计算参数匹配和测量参数匹配。计算参数匹配选取速度、位置等导航解算信息作为匹配的量测量;测量参数匹配则直接使用IMU测量得到的角速率、加速度和姿态信息进行匹配。一般来说,测量参数匹配方法的信息获取直接,对准速度较快,但其精度受载体弹性变形的影响较大,通常用于对准精度相对较低的场合;而计算参数匹配通过观测信息微分与滤波方式实现姿态对准,对准速度相对慢,但对准精度相对较高[13]。
对于旋转调制惯导发挥精度潜力的关键之一就是高精度的对准,因此通常选择基于卫星辅助的速度+位置组合导航方法进行对准。但卫星测速定位过程中存在随机误差,同时定位解算过程中也会产生随机噪声使速度量测量恶化,这些客观因素影响了以卫星定位为基准信息的数据品质,进而影响了对准滤波器误差估计的收敛性能。
实验室静态情况下,卫星接收机输出的速度如图1所示,虽然误差统计优于0.1m/s(1σ),但仍然存在噪声和相关性的误差。当前卫星接收机定位解算技术成熟,获取的卫星数据质量主要受限于卫星状态本身以及信息传输过程中的损失,进一步提高卫星数据品质、降低噪声,难度较大。提高接收机的数据更新频率并将数据预先进行处理是提升卫星数据品质的有效方法。
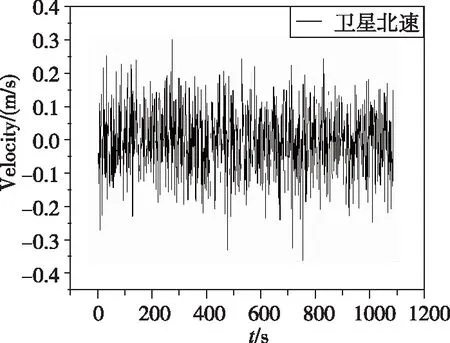
图1 卫星观测的北速
在现有卫星定位装置精度条件下,保证惯导系统对准的性能,降低卫星数据测量噪声的影响,可以考虑提高卫星数据更新频率,在滤波周期内进行多次速度观测,即速度积分匹配,通过速度积分获得位移增量来提升观测品质,降低噪声并削弱误差相关性。这种方法理论上能减小量测噪声对滤波的影响,有效提高失准角估计精度[14]。
本文选取速度积分匹配卡尔曼滤波进行精对准。在滤波过程中,将弹体子惯导测得的速度与卫星观测速度分别积分再做差作为量测量。
卫星速度积分为
(7)
弹体子惯导速度积分为
(8)
δL=Ls-Lgps=∑VsTM-∑VgpsTM=∑δVTM
(9)
其中,卫星数据以gps为上标,弹体子惯导系以s为上标;TK为卡尔曼滤波周期,TM为量测更新周期,N=TK/TM为一个卡尔曼滤波周期中量测量的更新次数;Vk为每个量测更新周期中的速度量测量。结果近似于将导航解算的子惯导与卫星观测速度误差以量测时间为间隔在整个卡尔曼滤波周期中累积相加。
卡尔曼滤波算法本质上是一种线性最小方差估计,在假设已知系统噪声和测量噪声的情况下,通过测量数据对系统状态进行估计。
动基座对准过程中的卡尔曼滤波模型如下

Z=HX+υ
(10)

3 仿真验证
为验证本文提出的方法与传统速度+位置匹配方式在减弱卫星数据噪声影响、提高误差量估计收敛速度方面的优越性,在实验室静态和车载试验环境下进行仿真分析。

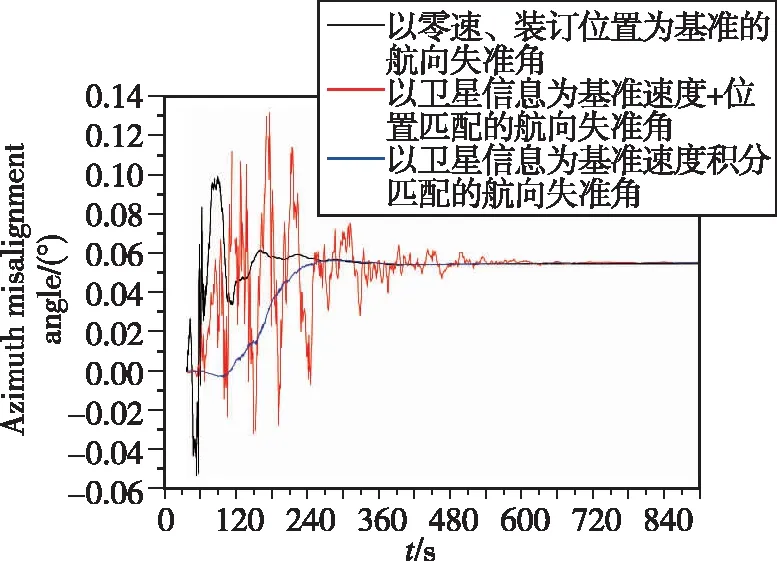
图2 实验室静态环境下两种基准信息匹配的航向失准角估计值
由图2可以看出,在实验室静态环境下,相较于无噪声的基准信息,以卫星信息为基准应用经典组合导航方法估计的航向失准角噪声更大,收敛时间更长,收敛情况变差。同样使用卫星信息为基准时,速度积分方式估计的航向失准角能在255s之后收敛,而速度+位置匹配方式估计的航向失准角在380s之后才趋于稳定。速度积分相较于速度+位置,不仅收敛时间短,超调量也小。
车载动基座对准试验一共进行了7次,选取其中一次车辆运动轨迹及行驶速度,如图3和图4所示,对准过程中车辆正常行驶。
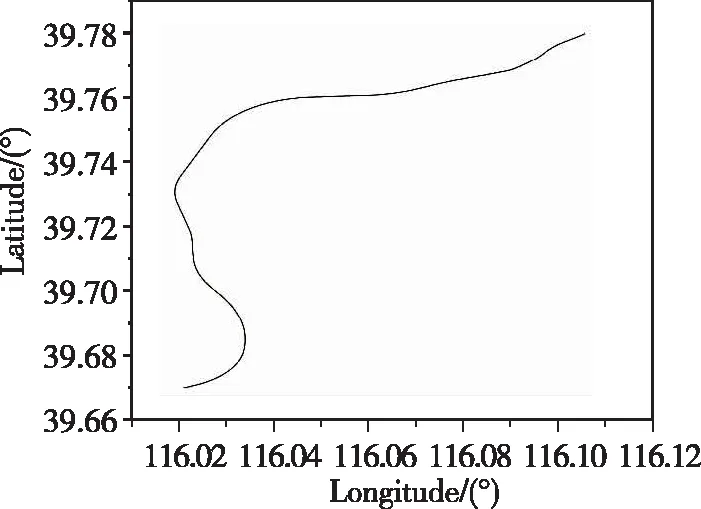
图3 车辆对准路线
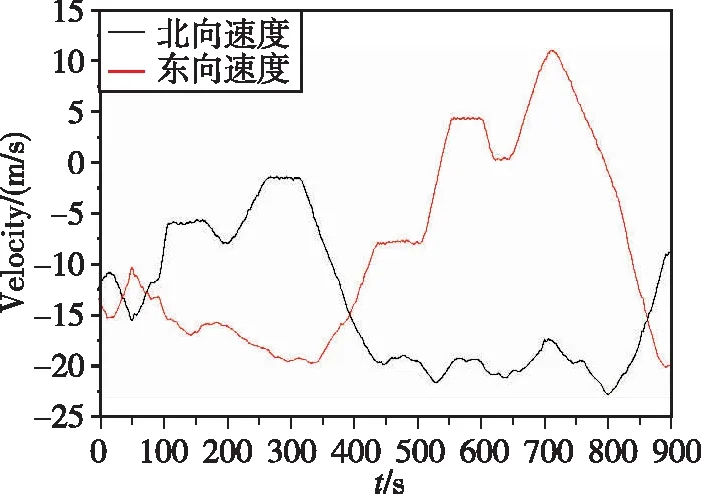
图4 对准中车辆行驶速度
车载环境下,速度积分匹配方式航向失准角估计值、对准后1h的导航速度误差及陀螺漂移估计值曲线如图5~图7所示。
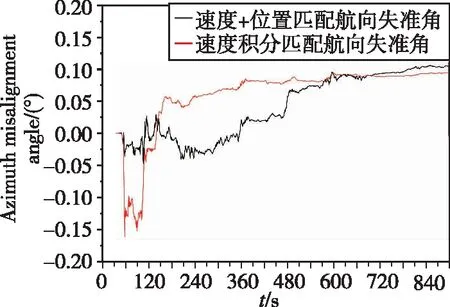
图5 车载试验两种匹配方式的航向失准角估计值
图5为车载环境下,两种匹配方法的航向失准角的估计情况。可以看出,车载环境下速度积分匹配方法的航向失准角在387s之后收敛平稳,且582s后稳态峰峰值波动小于20″;速度+位置匹配方式估计的航向失准角在650s才逐渐趋于收敛,一直到780s稳态值仍有一定的斜率。两者水平失准角的估计均能在100s~200s左右收敛,且精度相当,速度积分匹配方式比速度+位置匹配方式稍快。
图6为900s精对准结束后,系统捷联惯性导航解算的速度误差和位置误差,导航1h,除去数据异常跳点,惯性北向误差最大0.7m/s、东向速度误差最大0.4m/s。
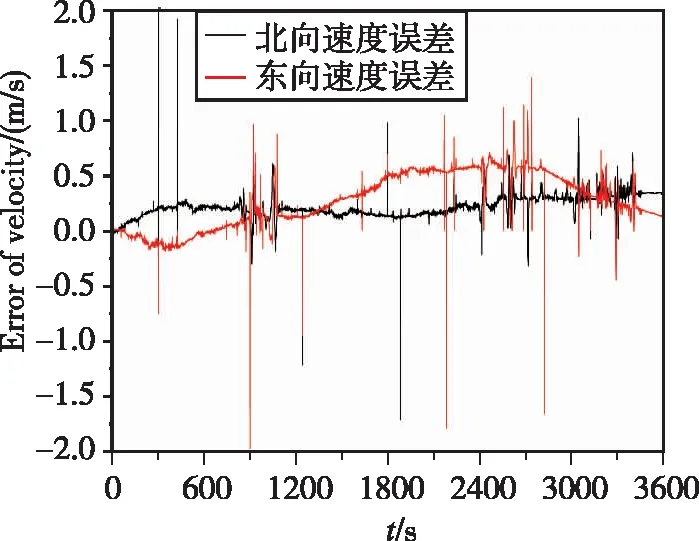
图6 车载试验速度积分匹配对准后导航1h的速度误差
综上,试验数据表明,旋转调制把等效东向陀螺漂移控制在优于0.001(°)/h的量级,从而更好地利用罗经效应进行高精度对准,取消了对载体机动的要求。本文速度积分匹配方法动基座对准航向收敛在400s以内,600s以内峰峰值波动小于20″。导航1h,北向速度误差在0.7m/s以内,东向速度误差最大0.4m/s,失准角估计的收敛速度快于传统速度+位置匹配方法,在缩短航向失准角收敛时间的同时有效提高了航向对准精度。
旋转调制惯导速度积分匹配方式估计的水平方向上陀螺漂移如图7所示。由图7可见,旋转调制后惯导系统陀螺漂移趋近于零,不会产生与罗经效应耦合的等效东向漂移,不再需要载体进行加减速或转弯等机动来分离陀螺漂移和航向失准角。
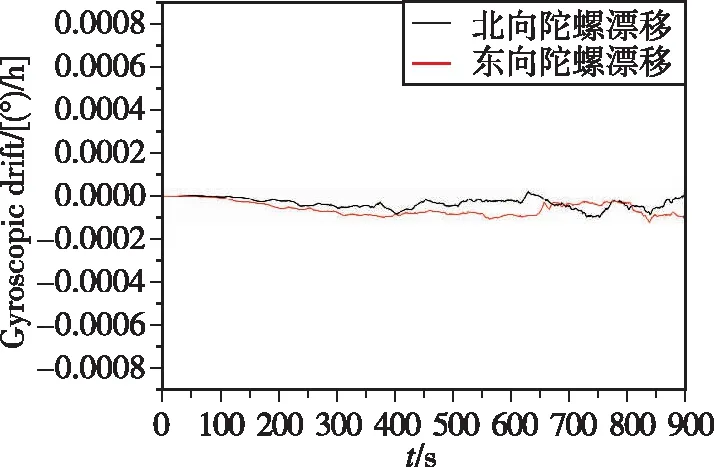
图7 速度积分匹配方式估计的水平陀螺漂移
4 结论
本文针对旋转调制惯导高精度快速对准的需求,分析了旋转调制惯导动态环境下的误差特性,推导出适应动基座对准的误差模型;提出了基于旋转调制惯导的速度积分匹配快速动基座对准方法,在实验室静态环境和车载环境下分别开展仿真实验,分析实验结果得到如下结论:
1)在静态环境下,以零速作为基准信息对准的滤波器收敛时间更短,收敛曲线更平滑,即基准信息的品质影响对准的时间长短和精度高低;
2)在现有的卫星接收机(基准信息)精度条件下,该方法相对速度+位置匹配方式能降低基准信息噪声的影响,提升了卫星辅助动基座对准滤波估计的收敛速度;
3)在车载动态环境下,该方法对准快速性和精度优于组合导航速度+位置匹配方式。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
文萃报·周五版(2022年11期)2022-03-23
华声文萃(2021年6期)2021-08-25
读者(2021年15期)2021-07-13
意林(2021年10期)2021-05-28
文萃报·周五版(2021年15期)2021-05-08
视野(2020年1期)2020-03-11
学苑创造·A版(2019年9期)2019-11-07
当代陕西(2019年17期)2019-10-08
