
基于方位角的“低慢小”目标定位算法研究
2021-09-27 16:15邬赟,谭文群,吴慧东,李金玲
电脑知识与技术 2021年19期
邬赟,谭文群,吴慧东,李金玲
摘要:随着现代科技的发展,以无人机为代表的低慢小飞行器得到了蓬勃的发展,而此类飞行器具有成本低,容易获取的特点,因此常被不法分子利用,其对国家安全和人民生活带来了很大的威胁。本文主要对此类目标的定位算法进行研究,其中主要研究基于方位角信息的目标定位算法,利用实际仿真环境对仅有两个接收站接收到目标信号情况下的定位性能进行分析。
关键词: 低慢小目标;方位角;目标定位
中图分类号:TN953 文献标识码:A
文章编号:1009-3044(2021)19-0139-02
1 引言
低慢小目标主要是指目标飞行高度低,速度慢,体积小的飞行器,其主要包括无人机、动力伞和热气球等[1-3]。随着科技的发展此类飞行器的性能越来越强大,例如低慢小目标的典型代表无人机,其不但可以携带高清摄像头,利用5G通信技术实时传送高清画面,其同样可以被不法分子改装后携带小型武器对国家安全带来威胁。而在我国以大疆公司为代表的厂商在无人机的性能和性价比上均属于全球领先水平并且每年销量庞大,此类低慢小飞行器非常容易获得,因此近些年来我们经常可以看到媒体报道无人机被不法分子利用威胁国家安全和侵犯人们生活隐私等[4-7]。近几年,有关部门出台了一些相关的管控措施对无人机等飞行器进行控制。而对此类低慢小目标管控的关键是发现目标并对目标进行定位跟踪,以便相关部门对其进行进一步的处理。因此有必要对此类目标定位算法进行系统性的研究。
目标定位算法的原理是利用接收机通过有源或者无源的方式获得观测参数,然后利用观测到的不同参数对目标进行定位解算。其根据目标和定位系统的不同,接收机接收到的参数主要包括方位角、时间差和多普勒频率等。因此常用的目标定位算法主要包括时间差定位、方位角定位、多普勒定位以及各种组合定位算法。由于低慢小目标存在飞行速度慢的特点,其多普勒信息不明显,因此针对低慢小目标主要采用时间差和方位角信息对其进行定位。前期本团队已针对时间差的低慢小目标定位进行了系统性的研究[8],但采用時间差定位需要最少三个以上的接收站接收到目标,而当接收站只有两个站接收到目标时,需要采用方位角的信息对其进行定位。下面本文主要在上篇论文的基础上对基于方位角的两站无人机定位性能进行研究。
2 基于方位角的“低慢小”目标定位
低慢小目标定位过程中主要获得的信息为方位角和时间差,其相应的定位模型下图所示。
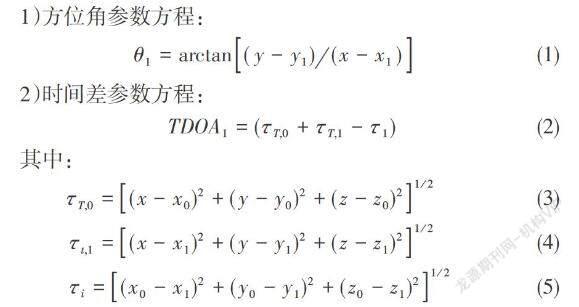
基于时间差的低慢小目标定位模型,其原理为利用发射站发射无线电波探测目标,当探测到目标时,无线电波的直达波和反射波构成一组时差参数。当在低慢小目标定位系统中,同时有3个接收站获得时差信号参数时即可对目标位置进行定位解算。而在实际定位过程中,由于无人机低空飞行的特点,无线电信号容易被建筑物遮挡,因此可能在同一时间只有两个接收站检测到目标。图1给出了在只有两个接收站接收到目标反射信号的低慢小目标定位系统,其定位原理是一个接收站除了可以接收到时间差信息外,还可以获得目标的方位角和俯仰角信息,由于实际定位系统中接收机获得的俯仰角信息误差比较大,因此一般采用方位角结合时差信息对目标进行定位。下面给出图1基于方位角的低慢小目标定位系统的参数方程。
1)方位角参数方程:
[θ1=arctan(y-y1)(x-x1)] (1)
2)时间差参数方程:
[TDOA1=(τT,0+τT,1-τ1)] (2)
其中:
[τT,0=(x-x0)2+(y-y0)2+(z-z0)212] (3)
[τt,1=(x-x1)2+(y-y1)2+(z-z1)212] (4)
[τi=(x0-x1)2+(y0-y1)2+(z0-z1)212] (5)
当低慢小目标定位系统中仅有两个接收站接收到目标反射信号时,可以利用每个接收站接收到的方位角和时间差信息构建4个方程对目标的位置进行定位解算,最终获得目标坐标[(x,y,z)]。此定位方法可以解决低慢小实际定位过程中信号容易被建筑物遮挡而导致的同一时间只有两个接收机接收到信号的问题。下面将利用实际应用场景对该定位算法进行仿真分析。
3 “低慢小”目标定位仿真性能分析
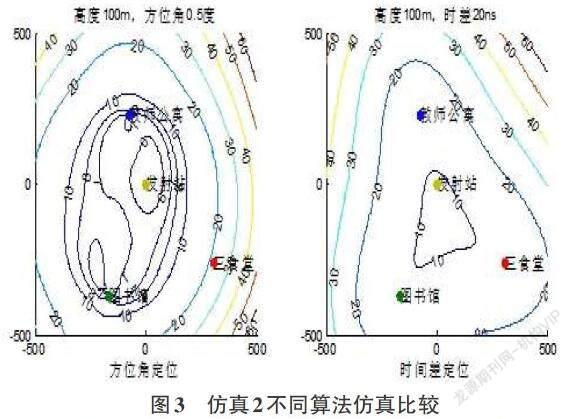
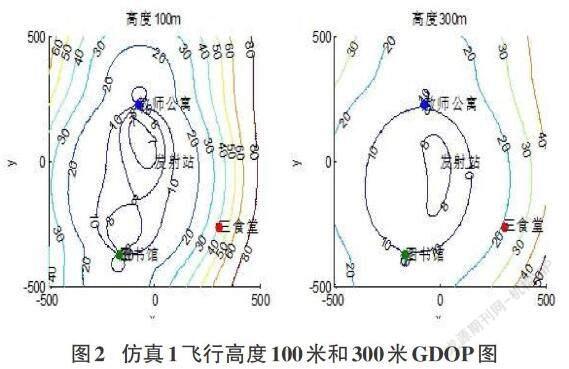
本文在文献[8]的基础上对基于方位角的低慢小目标定位算法进行进一步仿真,仿真过程中采用定位精度的几何稀释(GDOP)等高线图来比较定位方法的精度[9]。以南昌工程学院瑶湖校区作为低慢小目标定位实际应用场景,假设监测的目标为非法闯入校园进行偷拍活动的无人机,在学校的不同建筑物架设了多个接收机,发射机架设在学校中心的一食堂,其他接收机架设分别架设在图书馆、教师公寓和三食堂附近。下面分两种情况进行仿真比较。
1)假设时差误差为20ns、方位角误差为1o,比较不同高度层基于方位角定位性能。仿真GDOP结果如图2。
猜你喜欢
空间科学学报(2020年4期)2020-04-22
现代计算机(2018年19期)2018-08-01
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
亚太教育(2016年35期)2016-12-21
计算机教育(2016年9期)2016-12-21
职教论坛(2016年22期)2016-11-19
科技视界(2016年20期)2016-09-29
河南科技(2015年18期)2015-11-25
城市勘测(2013年5期)2013-03-06
