三维激光扫描技术在喀斯特洞穴测绘中的应用*
2021-09-27 10:20冯正茂杨世金黄杰品苏玉峰
地矿测绘 2021年3期
冯正茂,杨世金,黄杰品,苏玉峰
(1.广西安全工程职业技术学院,广西 南宁 530100;2.广西第一工业学校,广西 南宁 530022;3.广州南方测绘科技股份有限公司,广西 南宁 530022)
0 引言
我国是世界上喀斯特地貌分布面积最大、分布最广的国家。喀斯特地貌类型丰富多样,种类齐全。喀斯特洞穴规模大小不一,内部景观奇特,包括石笋、石柱、石钟乳、石幔等,形态各异。对喀斯特地貌的研究在理论和生产实践上都具有重要意义,可以开发其在旅游、地理和生态等方面巨大的价值。对喀斯特洞穴进行测绘,是对其进行研究的必要措施。由于洞穴内部能见度低,通风条件较差,不具备通信条件;内部地形多样,地势险峻,地下暗河错综复杂,环境较为恶劣[1-2]。传统的测量技术手段由于通视、通讯的原因,很难保障测量人员的人身安全和测绘生产的安全,无法适用于洞穴内部的测量,且传统手段的成果也较为单一,无法满足研究和开发的需要,必须探索和采用新的技术手段。
三维激光扫描技术通过高速激光扫描测量的方法,大面积高分辨率地快速获取被测对象表面大量密集点的三维坐标、反射率和纹理等信息[1],可以快速复建出被测物体的三维模型及点、线、面、体等各种图件数据,为快速、高精度地建立物体的三维影像模型提供了一种全新的技术手段。由于其可以密集地大量获取目标对象的数据点,因此相对于传统的全站仪、卫星导航RTK单点测量,三维激光扫描技术也被视为从单点测量到面测量的革命性技术突破。
由于三维激光扫描技术具备快速、非接触、实时、动态、三维、高精度、自动化等特点[3],将其应用于喀斯特洞穴的测量,不仅可以保障测量人员的人身安全和测绘生产的安全,还可以大大提高生产效率,为洞穴的研究和开发提供重要技术保障和丰富多样的成果。为此,本文以某喀斯特洞穴的测绘生产项目为例,研究三维激光扫描技术在喀斯特洞穴测绘中的应用。
1 项目概况
广西百色市某特大型喀斯特洞穴曾经于1990年初被开发为旅游景区,其总规划面积460亩,其中有水面积145亩。洞穴内的旅游主线由18个大小不一的洞厅相连而成,全长约4 500 m,内部有较大的地下河流沿主线穿洞而过,水路与步道并行。景区前期已开放8个溶洞大厅,行程1 500 m。有些大厅有罕见的大片洞内沙滩,是地下河水把上游砂粒冲入洞内沉积而成。洞内有巨大的洞厅,有高大的石柱,还有各种类型、各具形态的石钟乳、石笋、石帷幕、石花以及流石、边石、石盆、石梯田、边石坝等。单体或群体组合的形态造型,组成了各种形象逼真的图案[4]。洞内的地下暗河沿洞内旅游主线的地表河道蜿蜒曲折地流淌,长约4 500 m,最宽处约30 m,流至岩洞出口“重见天日”成为地面河流。
2008年,由于自然侵蚀,地下暗河冲毁了洞内设施,旅游景区存在重大的安全隐患,后来进行停业封洞处理。近期当地部门计划修复设施,继续开发,以便日后重启经营。为了进一步挖掘其在旅游和地理生态等方面的价值,为重新开放营业提供更多样的成果,给游客提供更详细、更方便的旅游服务,本文采用三维激光扫描技术对其进行全面测绘。提交的成果包括整个溶洞的三维模型、点云成果、洞内漫游的视频、总览图和主线剖面图以及各个洞厅内的容积。
2 项目总体技术流程
按照CHZ 3017—2015《地面三维激光扫描作业技术规程》和项目设计书的要求,制订项目总体技术流程,见图1。
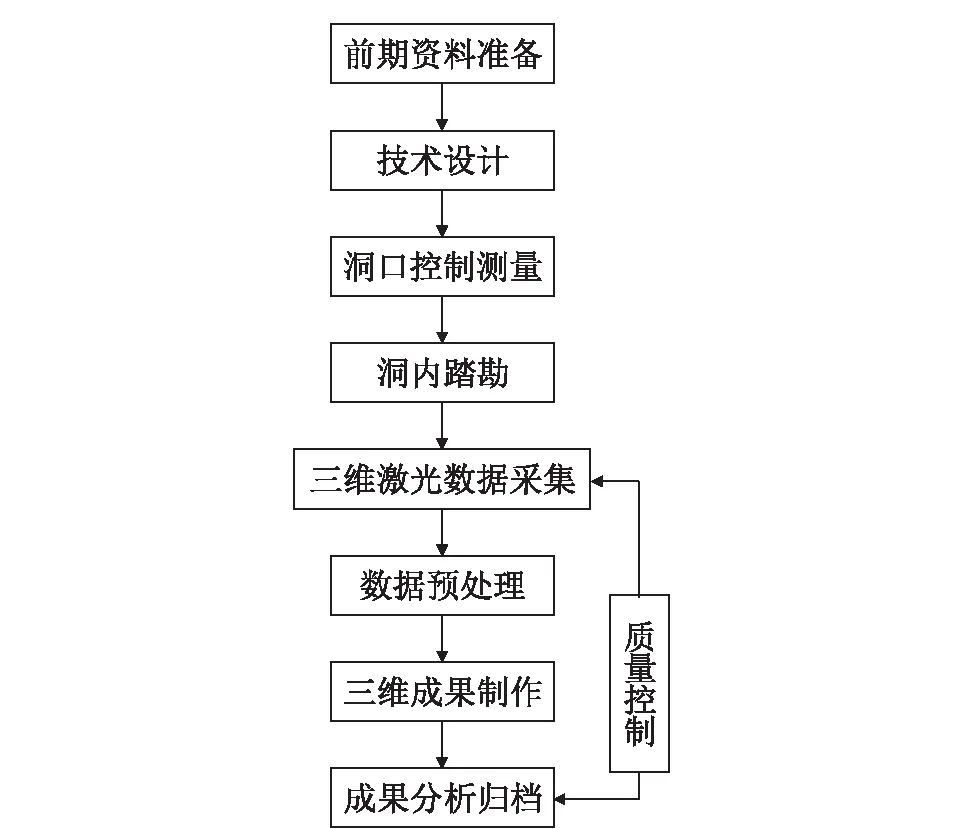
图1 三维激光扫描作业流程Fig.1 Process of 3D laser scanning
本项目使用的仪器为FARO Focus S350三维激光扫描系统。该系统主要参数,如表1所示。

表1 FARO Focus S350三维激光扫描系统主要参数
2.1 洞口控制点测量及洞内场地踏勘
洞口控制点测量的目的是使洞口附近的控制点与国家控制点联测,完成洞口控制点向洞内控制点的联系测量,把洞内采集的点云坐标转换成国家坐标,以便后续在点云拼接模型时确定点云模型的地理位置信息。
进行洞口控制点测量时,至少要在洞口附近选取3个特征点,并要求特征点通视良好。在所选取的特征点上打桩做标记或者贴上标靶纸,利用全站仪或者RTK将所选取的特征点三维坐标精确测出。
洞口控制测量完成后,接着对洞穴内部场地进行踏勘观察,评估扫描环境,可以根据洞内地形情况将地形大致分为:简单区、复杂区、水流区等区域。简单区指地形相对平坦、空间开阔,地形周围有巨大钟乳石、石笋,顶部有起伏,比如空间较大、比较宽敞的洞厅;复杂区指地形崎岖,钟乳石、石笋、石柱密集,空间曲折被钟乳石、石柱、石笋等分割为多段相互之间不能完全通视的区域;水流区指地形低洼,有地下暗河,人可以在水边行走,水的周围有钟乳石、石笋的区域。针对重点测区设站点的划分与布设,规划出架站点并将架站点最大化利用,避免出现遮蔽部分,尽可能设计出良好的线路,保证安全、有效、无遗漏地采集完所有的地物,并减少外业的采集时间,提高效率。几种区域示意图,见图2。
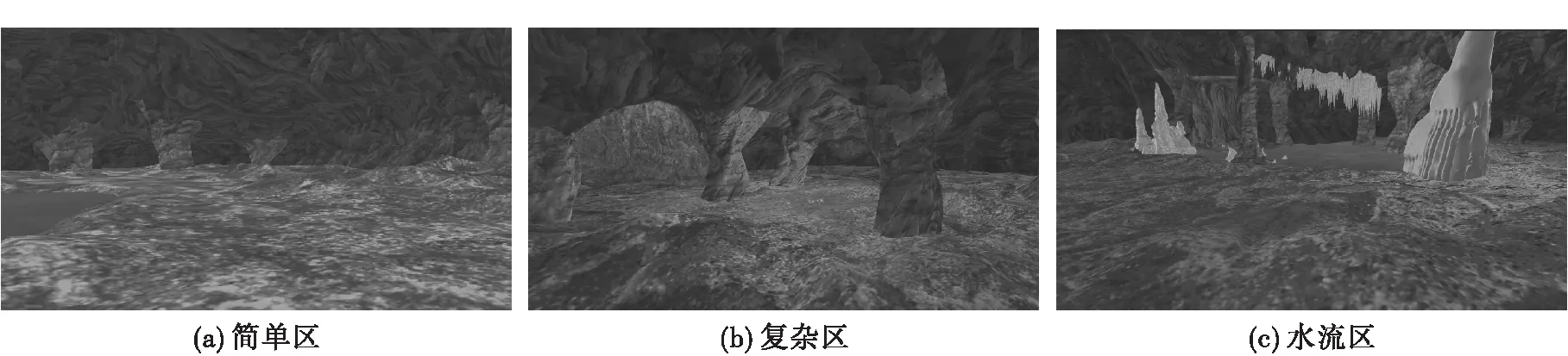
图2 几种区域类型示意图Fig.2 Diagram of different areas
2.2 三维激光测量数据采集
数据采集的步骤为:架设仪器,放置标靶球或粘贴标靶纸,仪器设置,数据采集。按照事先踏勘规划划分的设站点和路线,用三维激光扫描仪在溶洞内部进行实地扫描测量。标靶球放置原则:三个球不要共线,四个球不要共面;两个站点之间,至少有3个共用的标靶球,且应在扫描仪的有效范围内。每次采集数据前,都要先确认标靶球是否已放置完成。在扫描现场应根据测区地形和现场勘察实际情况,在草稿纸上标注好每个扫描站大致所在的位置和站号,供内业处理使用。
设置三维激光扫描仪参数,应先明确该区域数据的作用(设计书或甲方对数据质量的要求):若该区域数据采集是为了获取洞穴详细地形结构、分析结构,数据密度应设置得比较大;若数据采集只为了解溶洞大体结构,数据密度设置不必太大。按照要求调节合适的配置文件、分辨率和质量,保证采集到足够密度的数据。在水流区域,仪器应该避开水流,架设在岸边平整处。仪器开始扫描之后,人员应离开扫描区域,可躲避在区域之外,避免对扫描的干扰,也不要挡住标靶球和标靶纸。扫描结束后,可在仪器上进行数据预览,检查是否有遮蔽遗漏的区域,若有则要对遮蔽遗漏的区域进行补充扫描。
在洞穴内部,经常会遇到有些地形狭窄且伴有水分,这对于扫描测站配准和数据获取会造成一定影响。为了确保各测站的扫描数据高精度配准,需要用到标靶球。标靶球的作用就是作为数据公共标识存在,标靶球表面涂抹的高反射材质,在数据处理时容易被识别,有助于快速高精度的进行配准拼接。
整个项目,沿着4 500 m主线进行三维激光扫描测绘,总共架设了354个测站,无遗漏地扫描了主线全程和全部18个洞厅的三维点云数据。每个测站完成后都要预览检查测站数据,确认数据质量合格,为后面的数据处理做好准备。
2.3 数据预处理
外业扫描数据采集工作完成后,将扫描所得三维点云数据导入FARO扫描仪配套软件SCENE进行配准、过滤、坐标系转换、降噪与抽稀、图像数据处理、点云赋色、拼接、导出等处理[5]。导出扫描数据到点云处理软件,得到完整的点云数据以及精度报告,利用扫描软件的自动拼接功能将多站无序扫描数据拼接成整体。将原始数据导入SCENE进行预处理,原始数据为FLS格式数据直接拖入软件中,进行布置扫描操作,启用自动搜索标靶球、标靶纸功能将多站数据进行拼接。
在SCENE软件准备好扫描点云数据后,可以进行数据质量评估和进一步地处理。可以自行选择各种简单易用的功能——从简单测定到三维可视化,点云模型漫游浏览,再到网格划分和导出到各种点云格式(*.ISD、*.PCG、*.LAS、*.RCS等)和CAD格式文件。
2.4 三维成果制作及成果分析
通过三维激光扫描数据采集获取洞穴点云数据,利用不同的软件对其进行不同的加工处理,生成DEM、DLG、TDOM和三维模型等各类产品,以满足于不同应用的需求。目前对三维点云数据进行加工处理的软件主要有Geomagic、JRC3D、PPVision、SouthLidar、AutoCAD和Cass10.0等[6]。这些软件针对不同的实际应用需要,可生成不同的地理信息成果。
本项目要求提供的成果,除了洞穴的三维点云数据,还有洞穴内部点云漫游视频、洞穴主线的总览图、剖面图及主要洞厅的容积。因此,在项目生产中使用SCENE处理的点云模型漫游浏览录制了洞穴内部的漫游视频;点云数据抽稀后转成AutoCAD和Cass的*.dat格式,使用Cass10.0绘制了总览图、剖面图,并计算洞厅的容积。部分成果,如图3所示。
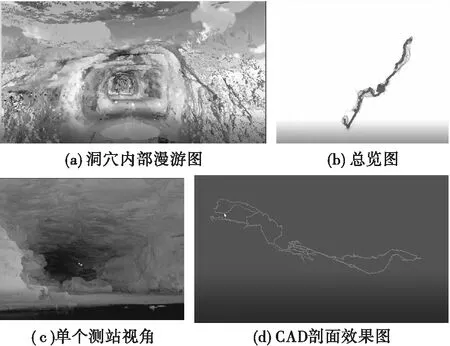
图3 部分成果图Fig.3 Some result maps
使用专门软件对点云数据成果进行处理,得到的成果可以满足各种应用需要,如:可以进行长度量测、面积计算、体积计算;可以进行工程规划设计、剖面分析、变形监测;还可以为BIM应用、高精度三维模型提供精确的数据[7]。本项目在溶洞三维模型的基础上得到模型三维等高线(见图4),结合点云数据、模型数据和线画图,可以计算溶洞各层面积及区域的容积。
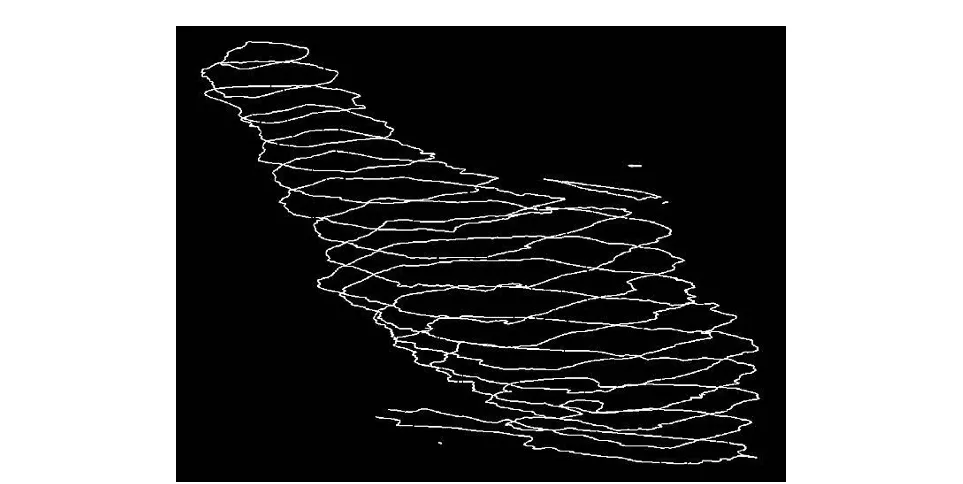
图4 溶洞模型三维等高线Fig.4 3D contour line of karst cave model
3 结束语
实践证明,针对喀斯特洞穴内部结构复杂、环境恶劣、地形地质条件特殊、安全隐患较多等特点,借助三维激光扫描技术的高精度、高分辨率和非接触式等优势,将其应用于喀斯特洞穴的测绘,可以生产出丰富多样的测绘地理信息成果,满足多方面应用的需要。
猜你喜欢
红领巾·探索(2022年11期)2023-01-06
乡村地理(2019年2期)2019-11-16
————水溶蚀岩石的奇观
家教世界(2019年4期)2019-02-26
小哥白尼(趣味科学)(2018年10期)2019-01-16
测绘工程(2018年3期)2018-03-20
现代装饰(2017年9期)2017-05-25
测绘学报(2015年4期)2015-01-14
文化月刊·下旬刊(2014年6期)2014-08-28
大地测量与地球动力学(2014年3期)2014-02-13
河南城建学院学报(2014年2期)2014-02-09