
一种三维激光扫描系统及点云标定方法
2021-09-27 08:57黄陆君
电子世界 2021年15期
黄陆君 虞 静 涂 朴
(1.四川文理学院智能制造学院;2.达州智能制造产业技术研究院)
激光扫描是一种对于空间进行扫描测量技术,通过主动发射脉冲激光信号并进行飞行时间测量和出射角度测量,可实现快速的空间断面测量错误。在工业检测应用中,断面扫描成像缺乏三维空间信息,无法满足三维空间测量需求,需要进行二次集成以实现三维空间扫描。
为实现基于二维激光扫描仪的三维空间扫描点云数据标定,本文从系统三维成像原理出发设计了系统点云标定方法,通过对安装误差参数的补偿实现了高精度点云数据的获取,经标定后的点云数据精度达到±1cm,能够满足常见的三维空间扫描应用需求。
1 激光三维扫描系统
为实现三维空间扫描成像,采用电控转台携带单线激光扫描仪连续旋转的方式实现空间三维扫描,扫描视场角180°使得整个系统可实现180°×360°空间三维扫描,系统结构及分布如图1所示。
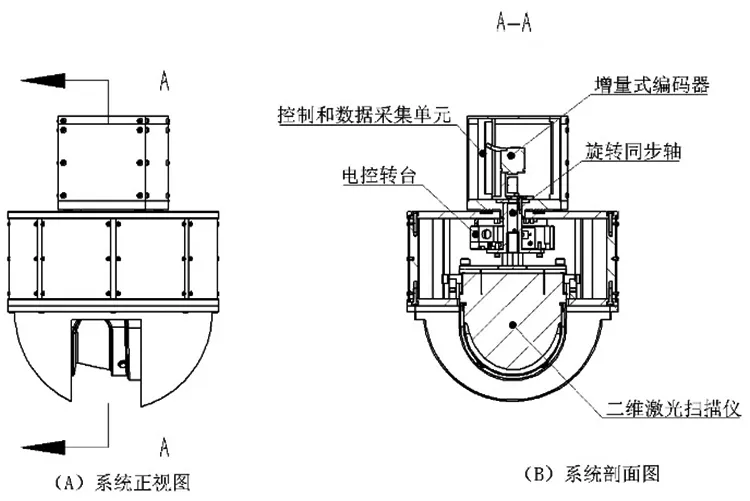
图1 系统结构
二维激光扫描仪采用SICK LMS511产品,可实现180°视场角断面扫描,扫描速度可达到100线/s,测距精度可达到±8mm,最大测距80m。电控转台以步进电机作为动力,最大旋转速度40°/s,设计系统旋转速度20°/s,单圈扫描时间18s。二维激光扫描仪通过旋转同步轴和增量式编码器连接,增量式编码器分辨率3600PPR,通过角度测量单元的4倍频后可达到14400PPR,测角精度0.025°。控制和数据采集单元置于设备固定端,采用ARM+FPGA组合实现系统控制、数据采集和数据处理,扫描仪通过导电滑环与控制和数据采集单元连接。
控制和数据采集单元包括ARM和FPGA两种控制器,ARM嵌入式系统采用Linux操作系统作为运行平台,以数据处理、数据交互和系统总控为主要功能。ARM嵌入式采用瑞士Toradex AG公司Apalis-TK1核心板作为主控单元,TK1具有4核ARM Cortex-A15处理单元,运行主频高达2.2GHz,支持CUDA 6.5;FPGA单元用于底层控制和数据采集,包括步进电机的细分控制、增量式编码器角度测量、系统电源管理等功能。FPGA单元设计了与ARM单元的数据交互接口,采用标准的串口通信协议,实现指令和数据的交互。
2 点云标校方法
2.1 三维点云解算
二维激光扫描仪采用极坐标表示扫描数据,设当前测距R且扫描角度α,设电控转台当前旋转角度β,则当前测点的三维坐标计算为:
二维激光扫描仪数据帧支持编码器脉冲直接输入,扫描仪自动记录当前脉冲数量,即一帧扫描数据对应同一个旋转角度。为进一步提升测角精度,需对激光扫描仪所记录的旋转角度进行插值运算,设一帧扫描点数量N且旋转角度为βi,则第n个扫描测点对应的旋转角度计算为:

其中βi,i+1,n为第i帧数据的第n个点所对应的转台旋转角度,注意扫描仪扫描角度为180°,但扫描光机为连续旋转的360°扫描,故式(2)角度增量中步进量为:

2.2 点云标定方法
系统坐标定义为扫描仪坐标和三维空间坐标的XZ轴完全重合的理想条件,实际的安装和机械加工会存在一定的误差,导致扫描仪坐标轴并不与定义的坐标轴重合。采用参数描述扫描仪坐标系和全局坐标系原点在XY轴向上的偏差及扫描仪安装的横滚和俯仰角度,则对扫描仪安装误差的标定计算为:

式中Rφ和Rγ分别为横滚和俯仰所对应的旋转矩阵,T为XY轴坐标的平移矩阵。
3 实验与分析
实验采用自制三维扫描系统,二维激光扫描仪、嵌入式控制系统和电控转台经系统集成后,由1路网络通信接口实现与外部通信和数据交互,扫描速度20°/s。系统安装误差导致三维扫描系统360°扫描后的点云存在错位,三维扫描点云精度不高。采用式(4)所述的方法对系统点云进行标定,经反复调整最终确定的系统标定参数为(-0.004,-0.046,0.1,0.4),经标定后的三维扫描系统所获取的点云细节更加明显,房间结构更加清晰,360°扫描所获取的点云错位消失,消除了系统安装误差对点云精度的影响,经标定后的平整墙面点云厚度小于2cm,点云精度达到了设计要求。如图2所示。
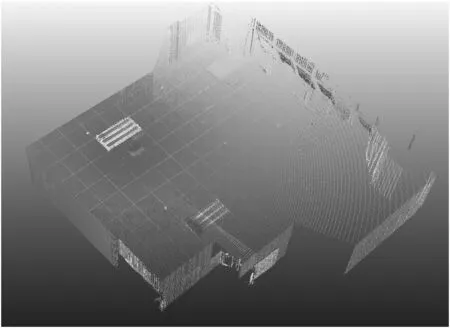
图2 标校后的点云
结语:为实现基于二维激光扫描仪的三维空间成像测量,设计了基于旋转的激光三维扫描系统,通过FPGA控制电控转台进行连续旋转扫描实现了空间三维测量,获取了三维扫描点云数据;提出了消除系统安装误差的点云标定方法,对扫描仪安装误差进行了补偿,提升了三维点云精度。通过室内场景的三维扫描和数据标定实验,验证了三维扫描系统功能和点云标定方法的有效性,实验结果表明,经标定后的三维扫描系统点云精度可达到±1cm,系统重复精度可以达到±1.5cm,系统功能和点云数据精度达到了设计预期要求。
猜你喜欢
汽车维修与保养(2020年11期)2020-06-09
模具制造(2019年3期)2019-06-06
少先队活动(2018年5期)2018-12-29
阅读(科学探秘)(2018年4期)2018-05-14
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年3期)2016-11-07
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
现代营销·经营版(2015年3期)2015-04-20
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10
现代营销·经营版(2013年5期)2013-05-14
