
基于MK60单片机的坡道循迹电动小车设计--2020电子设计竞赛C题试析
2021-09-26 16:49余搏立
电脑知识与技术 2021年20期
关键词:循迹
余搏立


摘要:基于2020年大学生电子设计竞赛中C题“坡道行驶电动小车”的任务要求,采用NXP MK60FX512VLQ15单片机作为主控芯片,研制搭载了直流四轮驱动坡道行驶电动小车,设计循迹检测、速度调节、声音提示、运行参数显示和电源等功能模块。采用4路红外线发射与接收管检测电路实现路线循迹,以IRLR7843构建光耦隔离全桥电路实现电机驱动,设计基于增量PID的转速-电流双闭环控制算法有效实现电动小车坡道运行的调速需求。经测试,电动小车能够按照设定行驶时间应对不同坡度角的路线骑行任务,系统调节过程短,小车运行平稳,误差在可控范围内,具有良好的人机交互功能,作品获得本次竞赛安徽省TI杯。
关键词:MK60;循迹;全桥电路;双闭环控制
中文分类号:TP27 文献标识码:A
文章编号:1009-3044(2021)20-0162-03
本文的研究背景来源于2020年全国TI杯大学生电子设计竞赛C题“坡道行驶电动小车”。该竞事主办方为教育部,经过多年发展,已是全国本科、高职院校电子信息类专业学生广泛参与的典型学科技能竞赛,以电子产品设计解决实际问题为出题要点;同时指导教师能够借助竞赛成果组织开展专业与课程建设改革,促进人才培养质量提升[1]。目前,大学生电动小车类作品的设计方法和理论较为成熟,本赛题的难点在于小车应对不同坡度角的驱动控制和84小时内实现小车整体设计、制作与调试[2]。采用模块化设计理念,以NXP MK60FX512VLQ15单片机作为核心控制器,本文设计一种多角度坡道循迹电动小车,设计方案基于满足赛题的具体要求,以期为同类大学生电子设计作品提供方案设计、硬件电路设计和软件设计等方面的具体经验借鉴。
1 方案设计
1.1技术指标
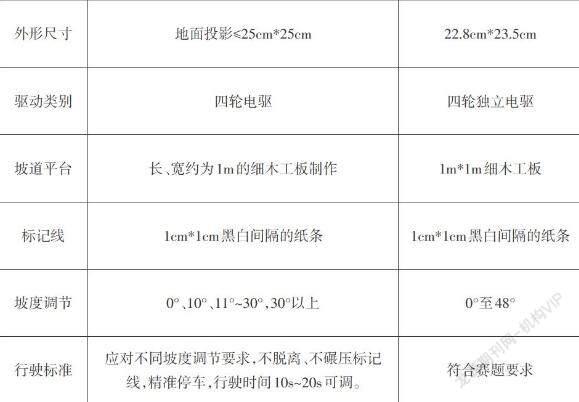
经过赛题研读、技术指标设计、可行性需求分析、功能模块验证、技术指标确定五个环节,设计出电动小车技术指标一览表,如下表1所示。将技术指标作为进行实验平台设计的标准,可以有效避免出现返工等延误设计进度的失误情况。
1.2 系统方案
本设计按照如图1所示的系统设计框图搭建功能模块。该小车控制系统主要由MCU主控制器、传感器循迹检测、运行时间设定、电机驱动、液晶显示、声音提示和供电电源等部分组成,通过螺钉固定在2.55mm厚度黑色玻纤板制作的小车底盘上。选择NXP MK60FX512VLQ15单片机作为小车的控制核心;采用红外线对管传感器识别黑白方格路线,经单片机程序设计,实现电动小车能够按照预设的工作模式完成多角度坡道行走的控制功能。结合赛题任务要求,电动小车的运行速度以时间为单位进行设定,通过OLED显示设定时间与实际行驶时间,小车停止行驶后,发出声音提示。
2 硬件设计
2.1循迹检测模块
循迹检测模块用于识别小车的行驶路径,而行驶路径由黑白间隔的纸质标记线构成,因此循迹检测实质就是黑白两种颜色及木工板背景色的实时检测。从传感器易于获取、便于车体安装、工作状态稳定以及外围电路简单等方面综合考虑,选用红外线发射与接收管进行循迹检测[3]。装载在车体上的四路红外对管发射端通电后持续发出红外光线,依据红外光线的反射特性,若骑行线路上出现黑色标记则红外对管的接收端无返回信号,反之对于骑行路线上的白色标记能够反射接收红外光线,以此识别黑线位置。如图8所示,循迹检测模块识别出白色标记时,用于状态显示的开关指示灯点亮,且单片机接收到低电平信号,检测距离2~30cm,检测角度35°,采用5V供电。
2.2电机与驱动电路
为保障小车的动力性和通过性设计时采用四轮电机驱动,同时结合车体的尺寸设计,选用RS380马达,其最大功率20W,空载转速15000rpm。使用IR2104S和IR LR7843搭建光耦隔离H型全桥驱动电路,通过专用PWM通道输出电机两端直流电压实现小车频繁的快速启动、制动和差速转向的速度控制[4],控制逻辑来源于循迹检测模块对骑行路线的识别结果。
3 软件设计
3.1 增量式PID控制
由于车体设计结构参数和环境参数具有一定的不确定性,在竞赛较短的时间内构建精准的数学模型很难实现,因此模糊控制、神经网络控制等算法的实现不符合实际。在电力拖动控制系统中传统PID算法具备易于实现、系统稳定、参数调试步骤简单等优势,而增量式PID误动作时影响小,适用于坡道小车动态调节,构建闭环反馈调节器,其输出是控制量的增量[5]:
[?uk=uk-uk-1=Kp?ek+Kiek+Kd[?ek-?e(k-1)]]
3.2 转速电流双闭环调速系统
经多次试验验证发现,坡道小车在起动时易出现打滑现象。相比较单闭环调速系统,转速电流双闭环直流调速起动过程恒流升速,能够充分发挥电机的过载能力,缩短起动过程,提供较高转矩。如图3所示,因此必须进行驱动电机的实际转速检测和母线电流检测,设置不同采样频率,检测值代入系统参与反馈调节控制,以速度外环控制为主[6]。
3.3程序设计流程图
单片机软件设计流程如图4所示,由主程序和中断程序组成,其中主程序中主要实现能够通过电位器设定电动小车运行时间,理论上时间设定范围10~20s线性对应电位器电压。中断程序中进行骑行路线标记识别和转速电流双闭环直流电机调速,为实现控制电动小车能够适应不同坡道运行和运行时间设定,采用差速控制实现电动小车弯道行走,PWM占空比通过外部电位器调节,转速闭环提高电动小车动态响应,电流闭环有效控制电机爬坡转矩。
4 測试方案及测试数据
4.1测试设备及方式
基于易于获取和测量精度要求,选用如下测试设备:手机、直尺、电子天平、秒表、万用表、示波器等。测试方法描述如下:
猜你喜欢
科学大众(2023年20期)2023-10-26
湘潭大学自然科学学报(2022年2期)2022-07-28
Chinese Physics B(2022年1期)2022-01-23
计算机测量与控制(2021年6期)2021-06-30
汽车与驾驶维修(维修版)(2019年4期)2019-05-09
电子测试(2018年15期)2018-09-26
电子世界(2018年9期)2018-05-30
中国科技纵横(2017年20期)2017-11-16
电子制作(2017年1期)2017-05-17
电子制作(2016年11期)2016-11-07
