基于MRE隔振器的变刚度半主动隔振系统分析
2021-09-26 01:27黄学功刘涛马伟佳张广
湖南大学学报·自然科学版 2021年8期
黄学功 刘涛 马伟佳 张广
摘 要:为探究磁流变弹性体隔振器应用于变刚度半主动隔振的可行性,制备硅橡胶基磁流变弹性体(MRE),设计制作MRE隔振器,对MRE材料和隔振器的性能进行测试,搭建基于MRE隔振器的变刚度半主动隔振系统并设计On-off控制、模糊控制和GA模糊控制算法. 测试结果表明:MRE的储能模量在磁感应强度为600 mT时达到饱和,磁流变效应达到2 000%以上;MRE隔振器的变刚度特性明显,当线圈电流从3 A变化为-3 A时,等效刚度从74.216 kN/m增加到137.128 kN/m,增加了84.8%;经过优化后的GA模糊控制效果提升了10%以上,三种控制算法对位移响应峰值的控制效果达到50%以上,对位移RMS值的控制效果达到60%以上. 结果表明:经过优化后的GA模糊控制效果提升明显,磁流变弹性体隔振器可以有效应用于变刚度半主动隔振控制系统.
关键词:智能材料;磁流变弹性体;变刚度;振动控制;基础隔震
中图分类号:TU352.1+1 文献标志码:A
Analysis of Variable Stiffness Semi-active
Vibration Isolation System Based on MRE Isolator
HUANG Xuegong,LIU Tao,MA Weijia,ZHANG Guang
(School of Mechanical Engineering,Nanjing University of Science and Technology,Nanjing 210094,China)
Abstract:In order to explore the feasibility of magnetorheological elastomer (MRE) used in variable stiffness semi-active vibration isolation,silicone rubber based MRE was prepared; the MRE isolator was designed and manufactured; the MRE material and the performance of the isolator were tested; the variable stiffness semi-active vibration isolation system based on MRE isolator was built,and the on-off control,fuzzy control and GA fuzzy control algorithms were designed. The test results show that the storage modulus of MRE reaches saturation when the magnetic induction intensity is 600 mT,and the magnetorheological effect reaches more than 2 000%; the variable stiffness characteristic of MRE isolator is obvious,when the coil current changes from 3 A to -3 A,and the equivalent stiffness increases from 74.216 kN/m to 137.128 kN/m with an increase of 84.8%. After optimization,the GA fuzzy control effect is improved by more than 10%,and the control effect of the three methods on the peak value of displacement response is more than 50%,and the control effect on the RMS value of displacement is more than 60%. The results show that the effect of GA fuzzy control is obviously improved after optimization,and the magnetorheological elastomer vibration isolator can be effectively applied to the semi-active vibration isolation control system with variable stiffness.
Key words:intelligent materials;magnetorheological elastomer;variable stiffness;vibration control;base vibration isolation
磁流變弹性体(Magnetorheological Elastomer,MRE)是磁流变材料的一种,一般是在基体材料(如橡胶等高分子聚合物)中添加微米级的软磁性颗粒,经过一系列工序制成[1-3]. 1996年Jolly团队[4]首次将软磁颗粒加入到高分子聚合物中得到了最初的磁流变弹性体,并测试得到了磁流变弹性体在施加磁场后的力学性能变化响应时间为毫秒级别. 加拿大学者Dargahi等 [5]用硅橡胶作为基体,加入体积分数为40%的羰基铁粉制成磁流变弹性体材料,当磁感应强度从0 T增加到0.45 T时,相对磁流变效应达到了1 672%. 近年来,随着磁流变弹性体性能的提升,其响应速度快、高磁流变效应的特点受到了越来越多的关注,已经成为土木工程、结构振动控制领域研究的热点.
磁流变弹性体隔震支座使用磁流变弹性体材料代替传统橡胶材料,可以通过磁感应的强弱来改变支座的刚度,相较于传统橡胶隔震支座拥有了可控性. 悉尼科技大学的Li等[6]和Gu等[7]根据传统的叠层橡胶隔振器设计了一款叠层MRE隔振支座,并进行了一系列实验研究,根据测试,该隔振器的最大水平剪切位移为26 mm,在零磁场强度的情况下纵向承载力可达到370 kg. 馬来西亚理工大学的Wahab等 [8]利用天然橡胶基MRE制作了一台大型的应用于实际建筑隔振的基础隔震支座,其中详细介绍了支座的设计加工过程,MRE叠层结构的焊接工艺,具有很高的实用价值. 测试表明,当工作电流从0 A增加到3 A时,支座的静态竖向承载力增加了14%,动态竖向承载力增加了16%.
现有研究中,磁流变弹性体隔震支座大多采用半主动控制机制. 近些年,国内外学者对基于磁流变弹性体隔震支座的半主动控制算法进行了大量研究. Eem等[9]提出基于模糊控制的半主动控制算法,并通过试验,验证了其对结构的减震效果. Xu等[10]提出了基于磁流变弹性体隔振支座的改进半主动变刚度控制算法,该算法充分利用支座的连续变刚度特性,控制效果良好. 悉尼科技大学的Gu等 [7]提出了基于神经网络控制的模糊控制算法,并进行了隔振控制试验,结果表明,该控制算法有很好的控制效果.
目前对MRE隔振器的研究大多为正向变刚度MRE隔振器,对负刚度MRE隔振器的研究较少. 负刚度MRE隔振器有效解决了正向变刚度MRE隔振器在没有振动的情况下也需要一直通电的问题,更加符合实际工程应用要求,因此对负刚度MRE隔振器进行全面研究具有极高的工程价值. 本文基于制备的磁流变弹性体材料,设计了一款面向横向振动的负刚度隔振器,并进行了性能测试试验. 基于负刚度隔振器搭建了变刚度半主动隔振控制系统,设计了GA模糊控制算法并进行了仿真分析.
1 MRE隔振器设计与试验方法
1.1 磁流变弹性体制备与测试
1.1.1 磁流变弹性体制备
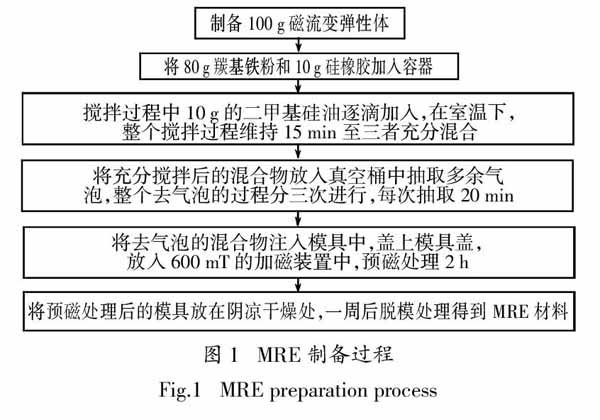
磁流变弹性体的制备分三个过程:材料的充分混合、预磁化处理以及室温下的固化. 具体过程如图1所示,先将羰基铁粉、硅橡胶和二甲基硅油按质量比为8 ∶ 1 ∶ 1倒入烧杯中,充分搅拌使其混合均匀;然后将材料放入真空桶,抽出材料中的气泡,这一步需反复多次抽取;倒入模具,盖上模具端盖,放在磁感应强度为600 mT的加磁装置中进行预磁化处理,预磁化的目的是为了提高MRE的磁流变效应,研究表明,预磁化的MRE可以产生更加明显的磁流变效应以及更大的磁致模量[11];加磁2 h后放置常温干燥环境5 ~ 7 d,即能脱模完成MRE样品的制备.
1.1.2 磁流变弹性体性能测试
将制备好的MRE样品置于如图2所示的测试仪器中,测试仪器为流变仪(型号:MCR302,Anton Paar),根据仪器的要求,将MRE材料制成直径为20 mm,厚度为1 mm的圆形薄片,将MRE样品置于转子与下盘片之间. 由于MRE要应用于MRE隔振器中,在工作过程中处于动态应变条件,需要研究MRE材料在动态应变下的特性才能更好地服务于MRE隔振器. 整个测试过程,MRE薄片处于剪切工作模式,这与后续的隔振器工作模式一致. 通过计算机设定室温下测量,流变仪自带的温控系统可以设置温度恒定;设置不同的工作条件,然后将测试结果存档. 本次测试MRE性能的测试条件为:室温25 ℃恒定,测试频率设置为8 Hz,应变条件设置为0.1%、0.5%、1%. 磁场强度从0 T开始持续增加,直到MRE材料的储能模量趋于稳定不变为止.
图3(a)为在不同应变条件作用下MRE的剪切储能模量与磁感应强度之间的关系. 从图中可以看出,MRE的剪切储能模量随磁感应强度呈非线性增
长趋势,在磁感应强度为600 mT时趋于稳定,在800 mT时达到稳定值. 其中在0.1%应变条件下储能模量最大,达到2.95 MPa,随着应变的增加,储能模量会随之降低,当应变为1%时,储能模量最大为2.15 MPa,较0.1%应变条件,储能模量衰减了27.6%,随着应变的增大,衰减会更加严重,这是Payne效应造成的,随着应变的增加,粘弹性材料的动态模量会减小. 图3(b)是不同应变条件下MRE的磁流变效应随磁感应强度的变化图,从图中可以看出,在小应变情况下,磁流变效应很大. 当应变条件为0.1%时,磁流变效应最大可达到2 040%. 换言之,在该应变条件下,当磁感应强度达到600 mT以上时,MRE的剪切储能模量增加了20倍. 高磁流变效应是实际工程应用的关键,可以让磁控条件降低,降低了外部磁场发生装置的设计难度.
1.2 MRE隔振器的设计与测试
1.2.1 MRE隔振器的设计
隔振器的具体设计过程参考文献[12]. 隔振器的实物模型、具体结构组成以及工作原理如图4所示. 其中永磁铁提供一定大小的磁场,使隔振器具有较大的初始刚度,在正常工作环境中能够承受较大的载荷,通过调节通入线圈电流的大小来改变隔振器的内部磁场环境,核心部分就是MRE叠层结构,通过内部磁感应强度的大小来改变此结构的刚度和阻尼大小,进而达到隔振的目的.
1.2.2 MRE隔振器的移频特性测试
由于MRE隔振器的固有频率随着外加磁场的变化而连续、快速变化,为了更好研究其隔振性能及其隔振控制规律,有必要进行相应的试验来对其移频特性进行测试. 图5为本文所搭建的MRE隔振器移频特性测试试验平台,信号发生器发出的信号经由功率放大器放大后驱动激振器推着水平滑台进行受迫振动,MRE隔振器安装于水平滑台之上,两个加速度传感器分别安装于MRE隔振器上和水平滑台上,用于测得激励和响应加速度信号,所测得的加速度信号经电荷放大器转变为电压型加速度信号后传入LMS动态测试系统,LMS动态测试系统对信号进行分析处理后最终传至PC,整个过程中,由直流电源给MRE隔振器供电.
根据试验数据得到如图6所示的加速度传递率曲线,在-3 A、-1 A、1 A、3 A电流下隔振器的共振频率分别为68 Hz、63 Hz、59 Hz和50 Hz. 因此,可以得出在-3~3 A的电流范围内MRE隔振器的共振频率随着励磁电流的增加而减小,由-3 A时的68 Hz减小到3 A时的50 Hz,减小了18 Hz,隔振器的共振频率發生了明显的负向移频. 这是由于作用于MRE的磁场是由励磁电流激发的磁场和永磁体所产生的磁场叠加而成的,当两个磁场的方向相反且励磁电流所激发的磁场小于永磁体的矫顽力时,励磁电流的值越大,叠加磁场的强度就越小,MRE的刚度就越小,从而隔振器的共振频率就越小. 当两个磁场的方向相同时,励磁电流的值越大,叠加磁场的强度就越大,MRE的刚度就越大,从而隔振器的共振频率就越大.
1.2.3 MRE隔振器的参数计算
隔振器的简化模型可以用一个单自由度模型来描述,如图7所示. 根据模型可以建立运动方程:
对于有阻尼单自由度振动系统来说,其共振频率为:
式中: fd为该隔振系统的共振频率.
通过式(2)计算得到的系统阻尼比ζ和试验测得的共振频率fd,利用式(3)可以计算系统的等效刚度,再由阻尼比公式可以得到系统的等效阻尼.
本次测试的负载质量为0.75 kg,结合图6可以得到MRE隔振器在不同电流下的性能参数如表1所示. Tm为传递率最大值,从表1可以看出,随着电流的增加,隔振器的刚度和阻尼随之减小. 其中,变刚度特性明显,阻尼变化不明显. 图8为隔振器刚度随电流变化曲线,由图8可得,刚度随电流基本呈线性变化关系,拟合曲线的关系式为:
k = -10.16 × I + 108.08 (4)
2 基于MRE隔振器的半主动隔振系统
2.1 地震作用下变刚度隔振系统的动力模型
对于层数较多的钢筋混凝土框架和钢架结构,在地震波的作用下,上层结构的变形以剪切变形为主,为了准确计算出各层的响应情况,可采用多质点计算模型来模拟建筑结构[13]. 建立多质点模型有三个假定条件:刚性地基,即各点水平运动完全一致;各楼层质量集中在一点;做纯剪切运动. 具体的模型结构如图9所示.
根据达朗贝尔原理,图9的隔震模型在地震波作用下的运动方程可表示为[14]:
式中:M、K、C分别为结构的质量、刚度以及阻尼矩阵;x(t)为位移响应;a(t)为地震加速度;F(t)为控制力. I = [1 0 0 …]T 1×n.
阻尼采用Rayleigh阻尼[15],计算公式如下:
由MRE隔振器以及电流变化产生的控制力F(t)可表示为:
F(t) = Δk·Δx (10)
由式(4)可知:
Δk = p·i = -10.16 × I (11)
控制力由隔振器输出直接作用于建筑的隔震层,可令
F(t) = m0·a0 (12)
式中:m0为隔振层的质量;a0为控制力产生的加速度.
将式(12)代入式(5)可得
2.2 控制算法
2.2.1 On-off 控制
由表1可知,隔振器刚度随电流变化明显,基于这种特性选用On-off控制策略进行半主动控制,内容如下[16]:
式中:kmax,kmin为隔振器的最大刚度和最小刚度. 当激励开始时,如果x·≥0,即被控对象偏离并且有偏离更远的趋势时,需要增大隔振器的刚度从而抑制这种运动趋势;当x· < 0时,被控对象趋近平衡位置,将隔振器刚度调到最小,使其慢慢回归平衡位置.
2.2.2 模糊控制
模糊控制器包括模糊化、推理机制、模糊规则和解模糊. 其中e作为负载相对位移偏差,是负载位移变化率,e和作为模糊控制器的输入,输出电流I作为施加在励磁线圈的电流. 输入论域设置为[-3,3],输出论域设置为[-3,3],将输入输出变量划分为7个模糊等级. 输入量的隶属函数选择Gaussmf型,可以提升模糊控制的平滑性,输出量隶属函数选择三角型,可以提高控制器的灵敏度,模糊推理机制采用Mamdani理论,用重心法进行解模糊. 模糊规则见表2.
2.2.3 遗传模糊控制
遗传算法基于自然选择、适者生存的遗传思想,具有对问题依赖性小和全局寻优的特点,可应用于模糊控制器的优化. 基于上节的模糊控制器,对其隶属函数进行优化,进而与优化前的模糊控制器控制效果进行比较.
输入采用的 Gaussmf 型隶属度函数,函数的表达式为:
每一个隶属函数由两个参数确定,在双输入系统中,每个输入有7个模糊子集,所以一共需要优化28个参数.
考虑到位移是与安全性有关的参数,本文以结构的位移响应作为评价标准,适应度函数为:
遗传算法的具体参数设置为:种群规模为100,迭代次数为300,交叉概率和变异概率分别为0.9和0.1. 以输入为EI-Centro地震波为例,表3是优化后得到的隶属度函数参数,图10是优化前后隶属度函数曲线对比,图11是优化前后输入输出曲面图对比. 从图11中可以看出,优化后,当模糊控制器的输入较大时,可以输出更大的控制电流,当模糊控制器的输入较小时,输出的控制电流可以控制得更小,优化了控制效果.
3 仿真分析
為了验证MRE隔振器在变刚度半主动隔振系统中的隔振效果,选取了抗震设防烈度为8度的某4层商店-住宅砌体结构房屋为例. 在EI-Centro波、Taft波以及人工地震波的作用下,对其结构进行地震激励仿真分析,地震波的采样时间为2 ms,将地震波的加速度幅值设为4 m/s2. 建筑结构参数如表4所示. 根据隔振器刚度随电流变化规律,拟采用20个MRE隔振支座,单个支座的刚度为3.4 × 105 kN/m, 得到隔震层的总刚度为6.8 × 105 kN/m. 根据式(14)系统状态方程以及图12所示的隔振控制系统,可以建立Simulink模型进行数值仿真分析.
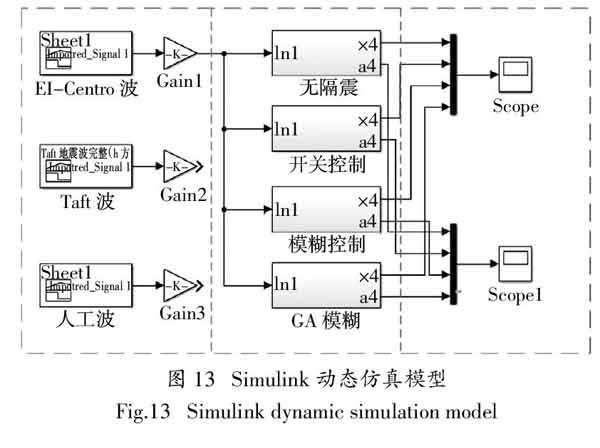
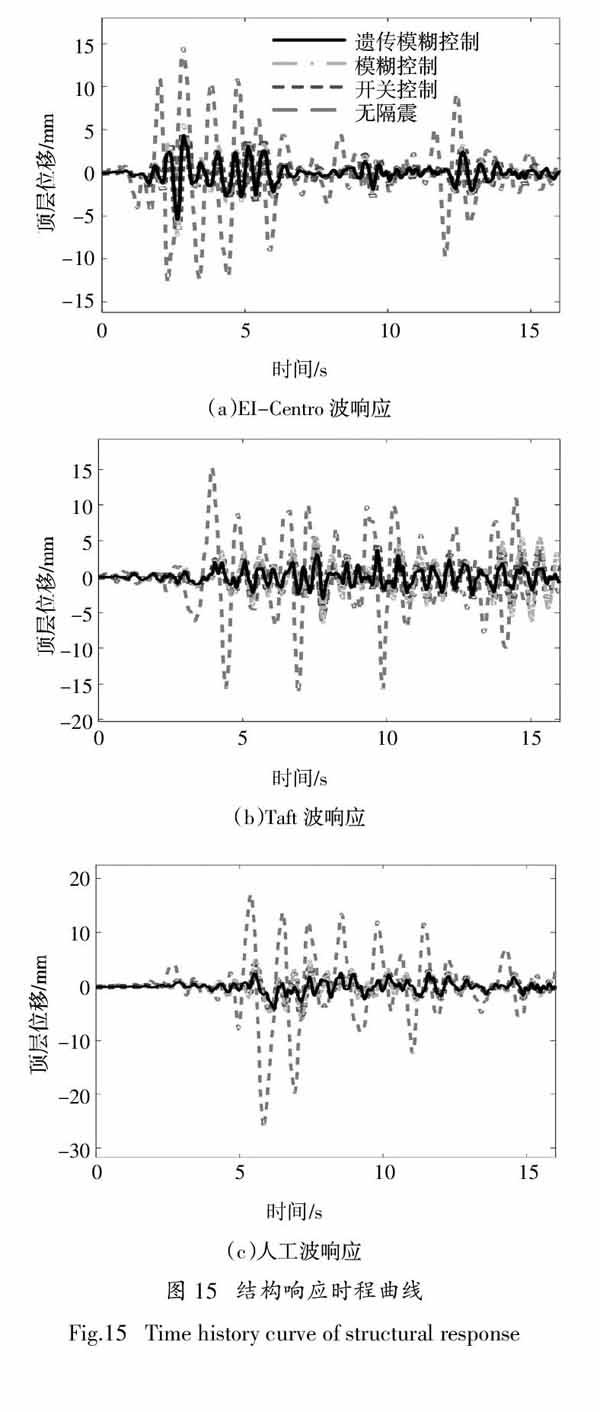
根据图12搭建Simulink动态仿真模型,如图13所示. 将EI-Centro波、Taft波以及人工波三种波作为激励,嵌入上文提到的On-off控制、模糊控制以及GA模糊控制三种控制算法,观察各自的响应情况. 三种地震波的加速度时程曲线如图14所示. 图15为仿真结果,顶层的位移响应时程曲线.
从图15中可以看出结构在三种控制策略的作用下,顶层的位移响应都具有明显的下降趋势,说明了MRE隔振器可用于对建筑的隔振. 通过位移响应对比发现,经过遗传算法优化的模糊控制器大大提高了控制性能. 根据位移响应曲线,提取出各层位移的响应峰值以及位移RMS(Root Mean Square)值得到下表数据. 表5、表6和表7分别是建筑结构在三种地震波作用下各层位移响应的峰值以及RMS值,图16是位移控制效果对比图.
从上图表中可以看出,三种半主动控制策略对结构的位移响应都具有较好的控制效果,对位移峰值的控制效果达到50%以上,对位移均方根值的控制效果到达了60%以上. 对位移均方根的控制效果优于对位移峰值的控制,这说明对激励过程的整体控制更好. 楼层越高,三种控制效果就会越差. 三种控制策略对人工波的控制效果最好,对EI-Centro波的控制效果最差. 经过遗传算法优化后的模糊控制器控制效果改善明显,提升了10%以上. 整体上On-off控制优于模糊控制,但是On-off控制在工作时是持续输出最大电流,相比较而言,模糊控制可以节省更多的能源,GA模糊控制在输出电流方面更加合理,控制效果更好,在实际工程中有应用的潜力.
4 结 论
1)自行制备的MRE在外部磁感应强度逐渐增大的条件下,储能模量显著增大,磁流变效应达到2 000%以上. 设计制作的磁流变弹性体隔振器变刚度特性明显,适用于变刚度半主动隔振控制系统.
2)以某4层钢筋混凝土建筑为例,采用On-off控制、模糊控制以及GA模糊控制算法进行控制效果的比较分析,验证了磁流变弹性体隔振器应用于变刚度半主动隔振控制系统的有效性.
3)三种半主动控制策略都具有良好的控制效果,对位移峰值的控制都能达到50%以上,对位移均方根值的控制更好,能达到60%以上.
4)运用遗传优化算法对模糊控制器的参数进行优化,优化后的模糊控制器在控制输出方面的性能有了一定的提升,整体的控制效果提升明显,超过了10%.
参考文献
[1] POPP K M,ZHANG X Z,LI W H,et al. MRE properties under shear and squeeze modes and applications[J]. Journal of Physics:Conference Series,2009,149:012095.
[2] LI W H,ZHOU Y,TIAN T F. Viscoelastic properties of MR elastomers under harmonic loading[J]. Rheologica Acta,2010,49(7):733—740.
[3] 黄学功,刘春,王炅. 硅橡胶基磁流变弹性体相对磁导率研究[J]. 功能材料,2016,47(2):2143—2147.
HUANG X G,LIU C,WANG J. Research on the relative permeability of magnetorheological elastomer based on silicone rubber[J].Journal of Functional Materials,2016,47(2):2143—2147.(In Chinese).
[4] JOLLY M R,CARLSON J D,MUOZ B C. A model of the behaviour of magnetorheological materials[J]. Smart Materials and Structures,1996,5(5):607—614(8).
[5] DARGAHI A,SEDAGHATI R,RAKHEJA S. On the properties of magnetorheological elastomers in shear mode:Design,fabrication and characterization[J]. Composites Part B:Engineering,2019,159:269—283.
[6] LI Y C,LI J C,LI W H,et al. Development and characterization of a magnetorheological elastomer based adaptive seismic isolator[J].Smart Materials and Structures,2013,22(3):035005.
[7] GU X Y,YU Y,LI Y C,et al. Experimental study of semi-active magnetorheological elastomer base isolation system using optimal neuro fuzzy logic control[J]. Mechanical Systems and Signal Processing,2019,119:380—398.
[8] WAHAB N A A,MAZLAN S A,UBAIDILLAH,et al. Fabrication and investigation on field-dependent properties of natural rubber based magneto-rheological elastomer isolator[J]. Smart Materials and Structures,2016,25(10):107002.
[9] EEM S H,JUNG H J,KOO J H. Seismic performance evaluation of an MR elastomer-based smart base isolation system using real-time hybrid simulation[J]. Smart Materials and Structures,2013,22(5):055003.
[10] XU Z D,SUO S,LU Y. Vibration control of platform structures with magnetorheological elastomer isolators based on an improved SAVS law[J]. Smart Materials and Structures,2016,25(6):065002.
[11] 郑星,浮洁,余淼,等. 基于链化模型的磁流变弹性体磁致压缩模量分析[J]. 功能材料,2012,43(15):2056—2059.
ZHENG X,FU J,YU M,et al. Analysis on magneto-induced compressive modulus of magnetorheological elastomer base on chain-like model[J].Journal of Functional Materials,2012,43(15):2056—2059. (In Chinese)
[12] 马伟佳. 面向横向振动的负刚度磁流变弹性体隔振器设计及研究[D]. 南京:南京理工大学,2020:42—49
MA W J. Design and research of negative stiffness magnetorheological elastomer vibration isolator for lateral vibration [D]. Nanjing:Nanjing University of Science and Technology,2020:42—49. (In Chinese)
[13] 李林. 建筑隔震支座力学模型对隔震分析结果的影响性研究[D]. 武汉:华中科技大学,2013:22—25.
LI L. Study on influence of isolation analysis result for building isolation bearing mechanics model[D]. Wuhan:Huazhong University of Science and Technology,2013:22—25. (In Chinese)
[14] 王奇.磁流变弹性体与变刚度支座及其智能隔震减振系统性能研究[D]. 大连:大连理工大学,2018:122—125.
WANG Q. Performance assessment of MRE,variable stiffness isolator,and its smart vibration isolation/reduction systems[D]. Dalian:Dalian University of Technology,2018:122—125. (In Chinese)
[15] 刘红石. Rayleigh阻尼比例系数的确定[J].噪声与振动控制,1999,19(6):21—22.
LIU H S.Determination of Rayleigh damping ratio coefficien [J].Noise and Vibration Control,1999,19(6):21—22. (In Chinese)
[16] 廖国江.磁流变弹性体的力学性能及其在振动控制中的应用[D]. 合肥:中国科学技术大学,2014:94—95.
LIAO G J. Mechanical property of magnetorheological elastomer and its application in vibration control[D]. Hefei:University of Science and Technology of China,2014:94—95. (In Chinese)
收稿日期:2020-08-17
基金項目:国家自然科学基金资助项目(51675280),National Natural Science Foundation of China(51675280)
作者简介:黄学功(1970—),男,安徽望江人,南京理工大学副研究员,博士
通信联系人,E-mail:huangxg@njust.edu.cn