基于YOLOv5s目标检测算法的研究
2021-09-24 03:56马琳琳马建新韩佳芳李雅迪
电脑知识与技术 2021年23期
关键词:目标检测
马琳琳 马建新 韩佳芳 李雅迪
摘要:近几年,环境污染依然是人们非常关注的话题,而生活垃圾的快速收集处理,能够有效地减少环境的污染。因此,智能垃圾收集机器人的研究与发展是非常必要的,它可以代替人们完成大量垃圾收集的工作。基于此,研究了一种YOLOv5s目标检测算法,先对目标进行合理的标注,接着进行有效的算法训练,然后算法测试,最后得到目标检测算法的模型,进而可以快速检测识别目标。
关键词: YOLOv5s;目标检测;目标标注;算法训练;算法测试
中图分类号:TP391 文献标识码:A
文章编号:1009-3044(2021)23-0100-04
Abstract:In recent years, environmental pollution is still a topic of great concern. It is necessary to collect and treat domestic waste quickly, which can effectively reduce environmental pollution. Therefore, the research and development of intelligent garbage collection robot is very necessary, it can replace people to complete a lot of garbage collection work. Based on this, a yolov5s target detection algorithm is studied. Firstly, the target is labeled reasonably, then the algorithm is trained effectively, and then the algorithm is tested. Finally, the model of the target detection algorithm is obtained, and then the target can be detected and recognized quickly.
Key words:YOLOv5s; target detection; target labeling; algorithm training; algorithm testing
1 引言
近幾年,我国对环境治理方面越来越重视。金山银山不如绿水青山。人们在提高物质生活的同时,更重视生活的质量。环境污染严重影响着人们的生活,甚至威胁着人们的生命。而大量的生活垃圾是目前环境污染的主要来源之一。因此,对垃圾收集分类的智能机器人是非常需要的,它可以代替人们完成大量垃圾收集分类的作业。
对于这种垃圾收集分类的机器人,核心技术是对检测目标进行快速识别,然后完成收集分类[1]。这就需要设计一种目标检测算法,可以识别垃圾,目标定位,然后追踪目标,并进行收集,整个过程完全自动化,无须人工参与,可以运用到景点、机场、校园、高档餐厅等多种场景。因此,研究目标检测算法对于完成垃圾收集机器人具有重要的应用价值。
2 YOLOv5算法原理和网络结构
2.1 YOLOv5算法
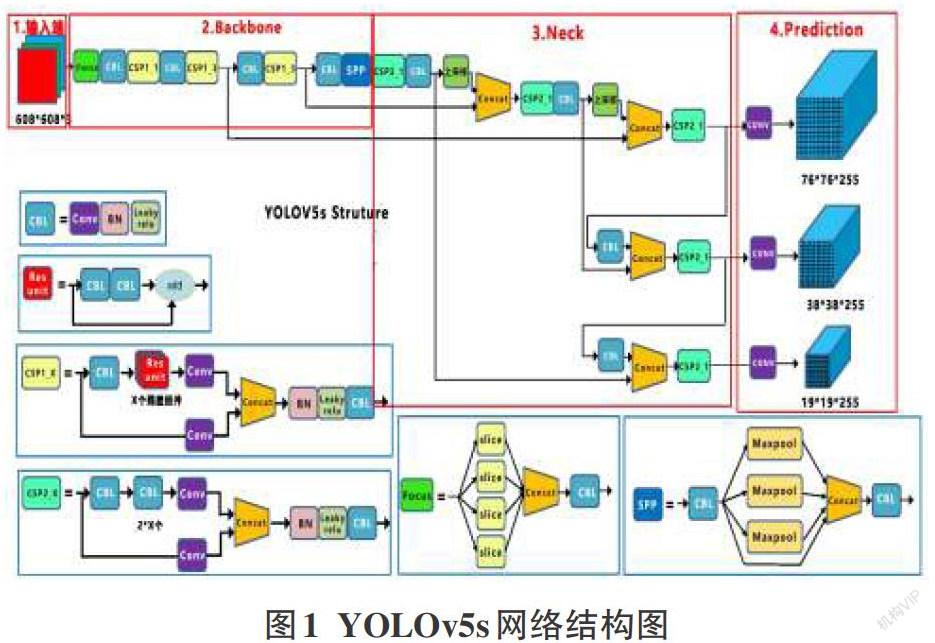
YOLOv5算法共有4种网络结构,分别是YOLOv5s、YOLOv5m、YOLOv5l和YOLOv5x,这四种网络结构在宽度和深度上不同,原理上基本一样,接下来以YOLOv5s为例介绍YOLOv5网络结构。
YOLOv5s的网络结构如图1所示,该结构分为四个部分输入端、Backbone(主干网络)、Neck网络和Prediction(输出端)。
各部分具有的主要功能结构如下[2]:
输入端:Mosaic数据增强、自适应锚框计算,以及自适应图片缩放。
主干网络:Focus结构、CSP结构。
Neck网络:FPN+PAN结构。
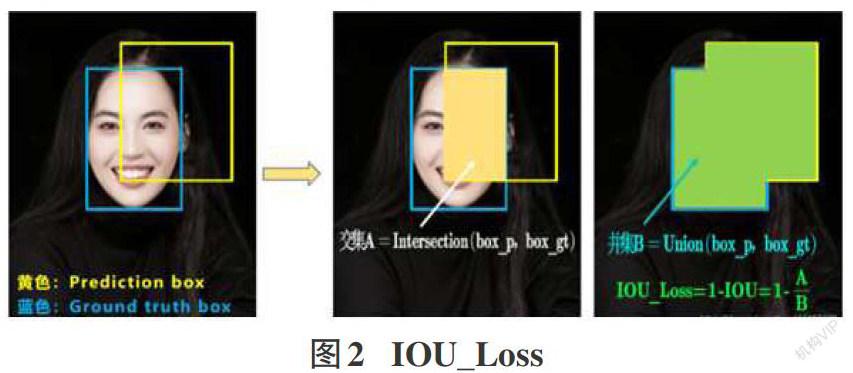
输出端:GIOU_Loss。
2.1.1 输入端
(1) Mosaic数据增强
输入端使用的数据增强方式是Mosaic方式,对数据集合采取随机缩放、随机剪裁、随机排布[3]。
主要有两个优点:
第一,提高了数据集的复杂度:对多张图片,进行随机的缩放以及剪裁,之后再随机分布,进行拼接,使数据集得到极大地丰富,特别是进行随机缩放操作,可以增加许多小目标,训练得到的模型,鲁棒性会更好;
第二,减少GPU内存使用:使得Mini-batch也就是一个批次从数据集读取进行训练的图片张数,不需要设置的很大,因此,训练时使用一个GPU也能达到比较好的训练效果。
(2) 自适应锚框计算
YOLO系列检测算法中,针对不同目标,都会初始设定好默认长宽的锚框,进行训练时,在初始设定好的锚框基础上,输出一个预测框,将标注的真实框和预测框做对比,并且计算它们的差距,之后再反向更新,迭代网络结构中的参数。在YOLOv3、YOLOv4中,训练不同的数据集时,计算初始锚框的值是通过单独的程序运行的,但在YOLOv5中将此功能嵌入到算法结构中,每次训练时,自适应的计算不同训练集中的最佳锚框值。
(3) 自适应图片缩放
在目标检测算法中,针对数据集中图片长宽一般不相同的问题,经常是将原始图片先缩放成一个统一的标准尺寸,全部处理后,再送入检测网络中,将长宽800*600的图像进行缩放,使用黑色背景来填充,填充后会出现大区域的黑边。在项目实际使用时,图片的长宽比几乎都不相同,因此缩放填充后,黑边大小都不同,如果填充的比较多,则存在信息冗余,影响网络推理速度[4]。
猜你喜欢
科技创新与应用(2016年36期)2017-02-21
软件(2016年4期)2017-01-20
科教导刊·电子版(2016年28期)2017-01-10
科学与财富(2016年28期)2016-10-14
电脑知识与技术(2016年5期)2016-04-14
科技视界(2016年4期)2016-02-22
哈尔滨理工大学学报(2015年5期)2016-01-19
湖南大学学报·自然科学版(2015年10期)2015-11-30
现代电子技术(2015年20期)2015-10-26
现代电子技术(2015年14期)2015-07-22