基于STM32视觉识别的高精度激光控制系统设计*
2021-09-24 03:42:48马晨韩团军潘玉桦闵一
电气传动自动化 2021年2期
马晨,韩团军,潘玉桦,闵一
(陕西理工大学,陕西 汉中 723000)
由于激光具有亮度高、方向性好等优点已经被广泛应用于高精度测量。激光测距技术在国防建设、工业自动化、智能识别及汽车工业等领域已经成为科研人员的研究重点。现有的激光测量系统集成度不高、体积较大而且在测量显示会出现和真值有误差等缺点[1-2]。设计一款零误差,体积和功耗小的视觉识别的高精度激光控制系统显得尤为重要。
本文提出一种视觉识别的高精度激光控制系统,系统由摄像头模块、激光传感器模块、串口模块以及数据存储模块组成,通过摄像头识别激光传感器LED屏幕上的数字量再通过图像采集、图像识别与处理以及无线传输技术实现了一款测量控制系统关于距离的零误差测量。利用单片机控制摄像头,采集激光测距仪上的图像数据,并将所采集到的图像信息传送到单片机内进行处理,单片机将采集回来的彩色图像经过灰度化、二值化处理将图像颜色变为黑白两种颜色。之后通过图像分割及图像识别技术将图像中的数字信息提取出来,利用无线传输模块,将识别到的数字信息发送到PC或移动端。整个系统设计能够充分利用摄像头的识别功能,最终能精确得到测量的距离。系统适用于静止、低速和中高速控制激光测距系统领域,具有很高的应用价值[3]。
1 系统硬件设计
整个系统硬件主要由摄像头模块、激光传感器模块、串口模块以及数据存储模块组成。其中摄像头用来识别激光传感器上LED屏上的数字量,并通过串口模块远程传输到计算机客户端实现测距信息的实时显示,而数据存储模块负责保存程序代码、摄像头采集到的图像。使用Python语言进行程序编写,同时使用Openmv和一些图像处理函数以此来提高系统工作效率。系统的整体框图如图1所示:
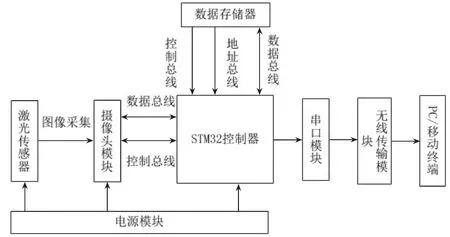
图1 系统的整体框图
1.1 图像采集电路设计
采用0V7725进行图像采集,0V7725具有小型化、耗能低等特点。其内部集成了数字图像处理器,可对原始图像先进行处理再输出,同时拥有单片VGA摄像头的全部功能。OV7725摄像头可以通过IIC总线进行控制,通过设置摄像头可以输出整帧图像、整帧图像中的任意矩形区域、子采样图像等各种用户所需的图像数据,同时还可以对分辨率进行控制,在VGA格式下图像最高帧数可达60帧秒。可以通过IIC总线进行设置。OV7725图像传感器模块设计图如图2所示。
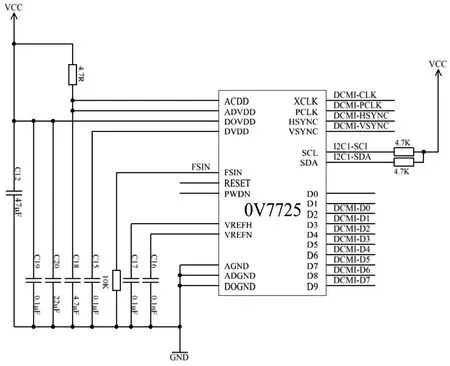
图2 OV7725图像传感器模块设计图
1.2 图像存储电路设计
由于激光传感器上数字图像的数据量大,单片机内存无法完成对激光传感器上图像的识别、存储和处理,因此要在外围电路上拓展数据存储模块,通过数据存储模块实现对图像的识别、存储和处理。采用SD卡作为图像数据存储器,与单片机进行通信方面选择SIO模式。其接口电路如图3所示:
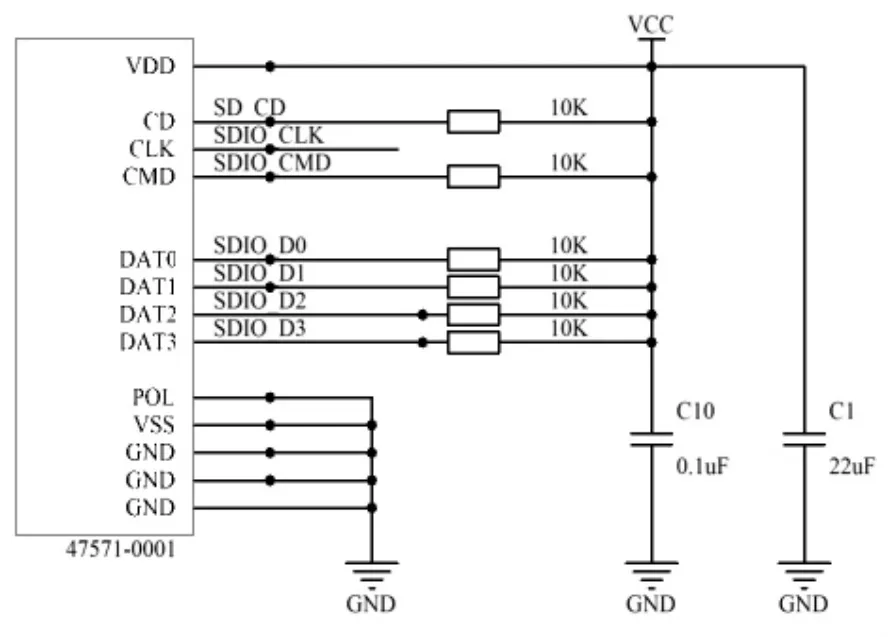
图3 SD卡接口电路图
2 系统软件设计
整个系统软件设计分为单片机采集激光器图像、图像识别及处理、无线传输这三大部分。系统软件总体框架,程序运行是从系统的初始化开始的,系统初始化完成后,单片机图像采集程序开始工作,采集完成后将图像保存到SD卡中。之后单片机对图像进行处理与识别,随后将得到的数字通过蓝牙模块传送到PC端。系统软件总框图如图4所示。
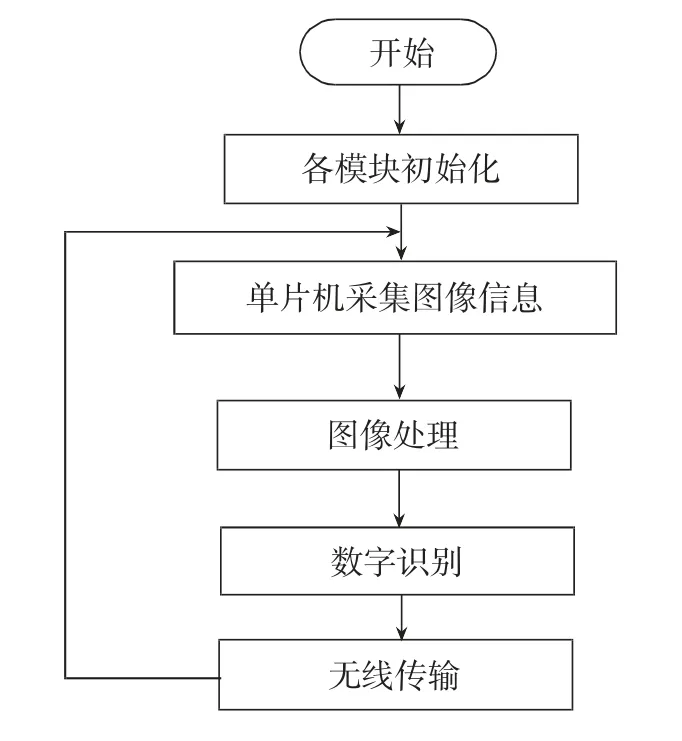
图4 系统软件总框图
2.1 图像采集程序设计
图像采集部分子程序是摄像头首先需要外接一个系统时钟,通过IIC总线设置相关寄存器输出分辨率为640*480的图像数据,然后逐行逐列输出像素灰度值。主控芯片根据同步信号读取像素灰度值。OV7725摄像头默认情况下,分辨率为640*480,为了在不降低图像分辨率的情况且还能去掉大量无用信息,先将图像中有数字的部分提取出来再进行处理。时序信号控制单片机对0V7725摄像头进行信号采集。过程为场信号使用捕捉上升沿的方式读取。单片机检测到场同步信号的上升沿时,程序进入读取像素值子程序;对行信号使用中断方式读取。单片机检测到行同步信号时,产生外部中断,进入中断服务子程序,读取本行的图像信号;对像素信号采用捕捉下降沿的方式读取。当单片机检测到像素同步信号的下跳沿时,单片机开始读取相应的像素值并将像素值存储到SD卡中。
2.2 图像处理
图像识别具体可分为图像预处理、数字区域分割、数字字符匹配三大部分。图像预处理的作用是滤除噪声增强图像信息,数字区域分割的作用是将单个数字所在区域从图像中分割出来,数字字符匹配的作用是将每个分割出来的矩形区域进行特征提取,将提取到的特征与已知数字特征进行对比,从而判断图像区域中的数字字符量。图像预处理需要经过图像矫正、高斯滤波、二值化以及滤波等步骤,得到质量较好的图像。
3 实验结果
整个系统通过软硬件设计完成了产品设计,在测试过程中,首先摄像头得到激光传感器稳定时的图像,用SD卡保存后利用图像处理算法对其进行区域分割,得到每个数字的区域位置坐标带入图像识别算法中。然后,通过改变激光传感器与被测物体间的距离,使激光传感器上的数值不断改变,经蓝牙发送给计算机终端,终端利用上位机实时显示激光传感器的改变,达到系统零误差距离测量的设计目的。显示结果如图5所示:

图5 系统的显示结果
4 结论
本文实现了一种视觉识别的高精度激光控制系统,通过摄像头对图像进行采集加上图像处理、图形分割、图像识别等一系列数字图像处理算法。并基于图像特征引入“穿线匹配法”对7段数码管进行识别,大大简化了图像识别算法的复杂性,同时又提高了图像处理算法的时效性。设计所采用的方法打破了这样的局限性,同时还提高了系统的实时性和准确性。通过测试,整个系统测量结果的稳定性和精确性非常高,因此具有一定的实用推广价值。
猜你喜欢
艺术家(2023年8期)2023-11-02 02:05:28
中国交通信息化(2022年9期)2022-10-28 06:14:40
小哥白尼(军事科学)(2022年2期)2022-05-25 13:19:30
汽车工程师(2021年12期)2022-01-18 06:02:43
电子制作(2019年16期)2019-09-27 09:34:50
红领巾·萌芽(2019年8期)2019-08-27 15:30:15
中国交通信息化(2019年4期)2019-07-13 05:51:34
电子制作(2018年19期)2018-11-14 02:37:04
电子制作(2018年14期)2018-08-21 01:38:16
CHIP新电脑(2016年3期)2016-03-10 14:22:03