“资源一号”02E星红外相机探测器成像验证方法研究
2021-09-18 06:19:14安萌梁德印聂云松李昊谦韩波
航天返回与遥感 2021年4期
安萌 梁德印 聂云松 李昊谦 韩波
(1 北京空间飞行器总体设计部,北京 100094)
(2 中国空间技术研究院遥感卫星总体部,北京 100094)
(3 北京空间机电研究所,北京 100094)
0 引言
“资源一号”02E卫星是自然资源部定制的业务卫星,卫星采用一步正样的研制模式。卫星上配置了一台长波红外相机,分辨率为16m,为保证一次可以覆盖全国大中型城市的需求,其幅宽达到了115km。红外探测器是红外相机的核心器件,对系统成像的性能有直接影响。为满足成像幅宽要求,红外相机采用国产新研红外探测器组件,其阵列的规模为8 000像元,由8片1 024像元的单模块探测器拼接而成。
“资源一号”02E星红外相机探测器组件技术难度大,实施工艺复杂,需要突破超长线列芯片微组装技术、高性能长波材料及器件制备技术等一系列关键技术。因此,在红外相机方案阶段需要对红外探测器的性能提前开展摸底测试,验证探测器性能是否满足成像要求。由于红外相机采用一步正样的研制方式,没有鉴定产品用于成像性能测试,经分析,“委内瑞拉遥感二号”卫星(以下简称“委遥二号”卫星)红外相机的光学系统与“资源一号”02E星红外相机的光学系统相似,因此在方案阶段采用“委遥二号”卫星红外相机的光学系统与“资源一号”02E星红外相机的单模块红外探测器组装成系统进行成像性能测试。
本文对单模块红外探测器在系统上的验证情况进行了介绍,主要包括实验状态、实验流程、测试过程和结果分析及实验结论,可作为其他红外相机提前开展探测器验证实验的参考。
1 探测器验证方案
本实验的主要验证目的如下:
1)在方案阶段,对红外探测器的性能提前开展摸底测试,早期发现探测器的性能不足,进行性能的优化完善,保障正样探测器研制的品质。
2)将红外探测器与现有光学系统相结合,验证红外探测器装机后,相机系统的主要指标是否满足设计要求。
1.1 探测器总体指标
“资源一号”02E星红外相机探测器为1 024像元×6级TDI技术的红外焦平面探测器,红外探测器芯片采用长波碲镉汞外延材料制造光伏二极管阵列,实现光电转换功能;读出电路芯片采用硅CMOS型数模混合集成电路,探测器输出的电学信号通过读出电路进行电荷积分、放大和顺序读出。红外探测器验证实验的主要目的是对影响红外相机性能的探测器关键指标进行系统级摸底测试,验证红外探测器性能是否满足指标要求。被测红外探测器的状态参数如表1所示。
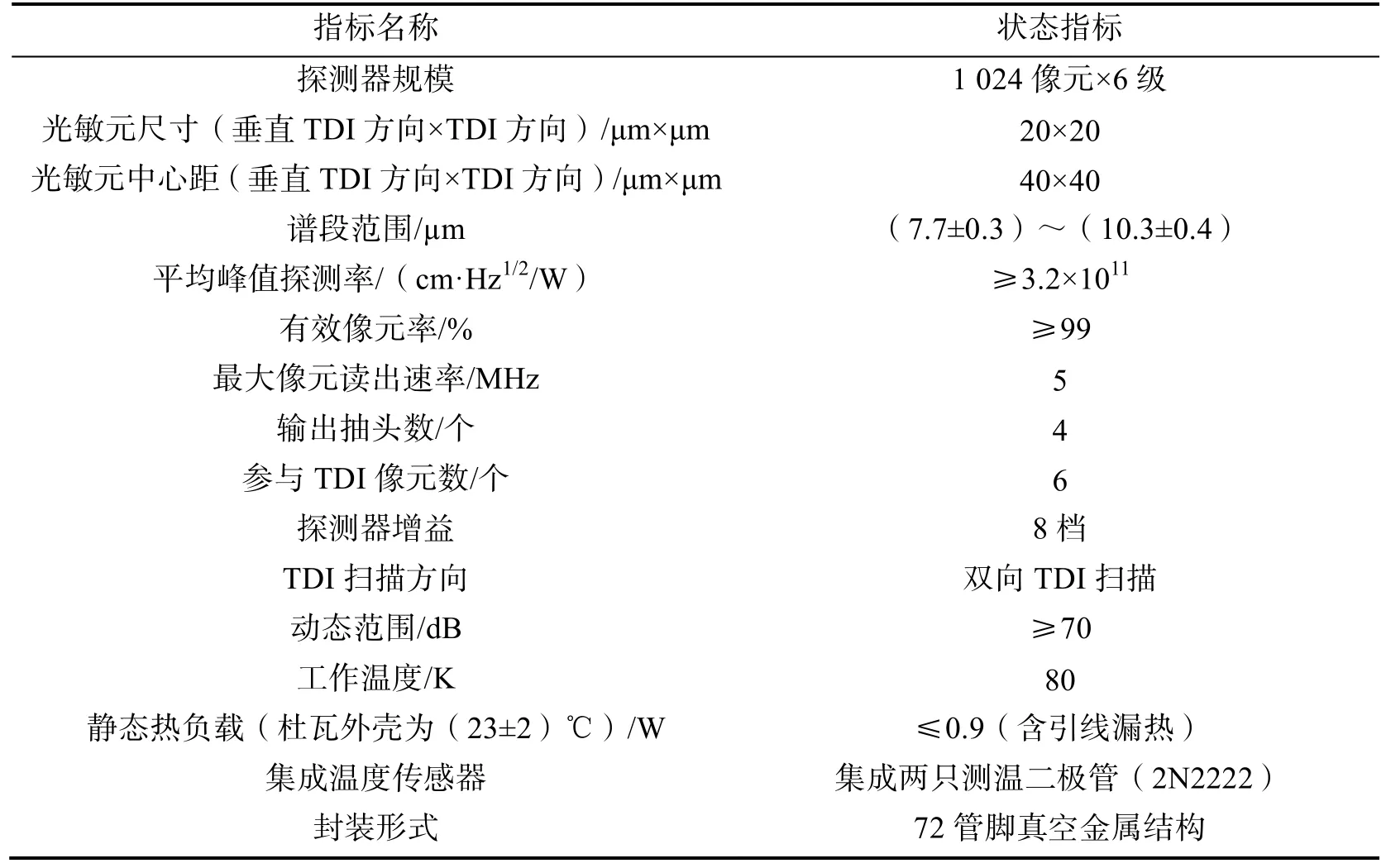
表1 被测红外探测器状态参数Tab.1 Status performance parameters of the Infrared detector
1.2 实验指标分析
因开展单模块红外探测器测试验证时,“资源一号”02E红外相机光学系统尚未完成研制,需借用现有其他相机光学系统开展成像实验。为较准确的获得测试结果,选用的光学系统参数应与红外探测器的指标匹配。“资源一号”02E卫星红外相机的光学系统采用三反离轴形式[1],根据光学系统形式和指标,目前与探测器相匹配可用于单模块红外探测器测试的相机光学系统仅有“委遥二号”卫星红外相机鉴定产品的光学系统,其主要光学系统参数与02E星红外相机光学系统参数的比对如表2所示。
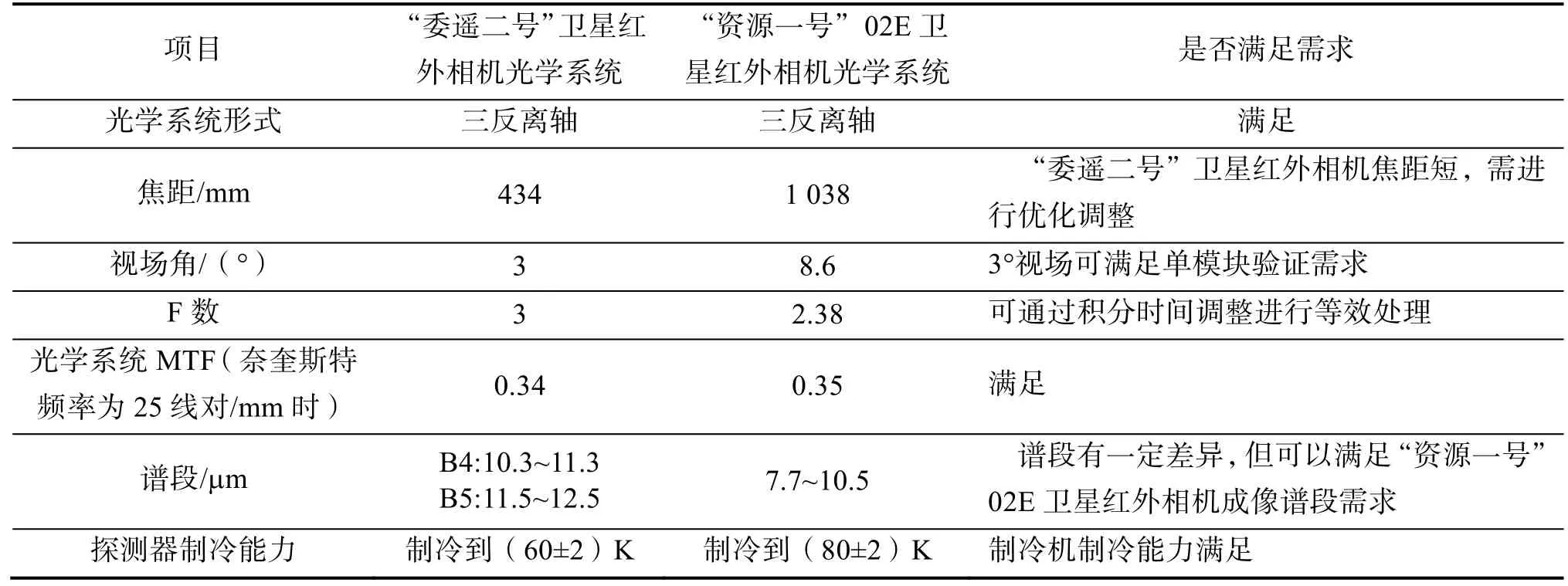
表2 “委遥二号”卫星红外相机光学系统与“资源一号”02E卫星红外相机光学系统主要参数比对Tab.2 Optical system parameters comparison between VRSS-2 infrared camera and 02E infrared camera
经过比对分析,“委遥二号”卫星红外相机(以下简称委遥相机)光学系统形式、焦距、视场角、光学系统MTF和谱段等指标满足“资源一号”02E星红外相机(以下简称02E相机)的成像测试需求[2]。但两相机焦距和F数存在差异,需要对成像参数进行调整满足测试需要。“委遥二号”卫星红外相机的F数是“资源一号”02E星红外相机的1.26倍,而“资源一号”02E星红外相机的焦距是“委遥二号”卫星红外相机的2.39倍,因此考虑通过调整积分时间进行近似等效。根据计算分析,将委遥相机150μs的积分时间调整到159μs后,两相机系统奈奎斯特(Nyquist)频率下MTF的差异不大于0.01,系统噪声等效温差(NETD)差异不大于0.003K,两相机焦距和F数差异对实验结果的影响可忽略。此外,“委遥二号”卫星红外相机探测器线阵方向长度与“资源一号”02E卫星红外相机单模块探测器线阵长度相同,可实现整个探测器视场覆盖成像,因此本实验可选用“委遥二号”卫星红外相机的光学系统。
本实验主要对探测器性能在系统级进行摸底测试,涉及的关键指标包括探测器NETD、探测器MTF和系统NETD,如表3所示。

表3 红外探测器组件系统级验证测试项目及指标Tab.3 System test items and performance requirements of the infrared detector
1.3 实验流程分析
红外探测器涉及多类指标,根据验证的目的,系统级验证主要是针对相机自身辐射性能的测试验证。验证测试的指标包括系统静态调制传递函数、系统噪声等效温差,同时为了评估单模块探测器的性能,验证了探测器的噪声等效温差。根据实验目的和总体指标要求,提出了测试流程,“资源一号”02E星红外相机探测器成像测试验证流程如图1所示。

图1 “资源一号”02E星红外相机探测器成像测试验证流程图Fig.1 The imaging test flowchart of ZY-1 02E satellite infrared detector
本实验主要对探测器MTF、探测器NETD和系统NETD进行摸底测试,按照验证目的,将测试流程分为测试准备、探测器单模块NETD测试、相机系统MTF测试和NETD测试等环节。其中测试准备主要包括定焦、单模块探测器组件连接和制冷机组件连接。红外光学系统设计有实出瞳,通过与探测器冷屏的匹配达到抑制视场外杂光的目的,为保证在系统测试上的准确性,需将单模块探测器与“委遥二号”卫星红外相机光学系统精确对准,实现出瞳与冷屏的匹配,以达到减小杂散辐射,提高MTF和NETD测试精度的目的。
2 验证方法
参加测试的主要包括相机主光学装置、中继光学装置、单模块探测器组件、转接板和相机视频处理器[3]。探测器采用“委遥二号”卫星红外相机的制冷机进行制冷以满足安装布局要求。地面测试设备主要包括平行光管、黑体、靶标等。被测红外相机及地面测试系统组成如图2所示。

图2 被测红外相机及地面测试系统组成框图Fig.2 The block diagram of the tested infrared camera and the ground test system
其中被测相机系统包括主光学装置、中继光学装置、单模块探测器制冷机组件、转接板及红外相机视频处理器。地面测试设备包括地面直流电源、制冷控制电路、测温万用表、遥测遥控综合电子系统、地面检测台及其直流电源和图像采集设备。
探测器单模块测试时,使用“资源一号”02E星红外相机电性焦面电路和视频处理器为探测器提供驱动信号和接收探测器信息,探测器生产单位提供了转接板[4-5],使“资源一号”02E星红外相机焦面电路可与探测器连接。采用“委遥二号”卫星红外相机的制冷机对焦面进行制冷,在实验时将探测器温度制冷到80K左右,该组件与“委遥二号”卫星红外相机光学系统匹配。
3.1 系统MTF测试
将特定空间频率的明暗相间的矩形靶标置于平行光管的焦面处作为物,通过均匀辐射源照射,相机对矩形靶标成像。将不同空间频率下靶标图像的调制度在零空间频率(或接近零空间频率)处进行归一和拟合,得到相机的对比度传递函数,根据对比度传递函数计算相机的静态调制传递函数。系统 MTF测试示意图如图3所示。

图3 系统MTF测试示意Fig.3 System MTF test diagram
3.2 系统NETD和探测器NETD测试
NETD是红外探测器能探测到的最小温差,能够表征探测器的性能水平。本实验在系统调试前,首先通过红外相机探测器组件窗口正对标准可调温黑体,如图4所示,黑体口径能够完全覆盖探测器视场而不会引入背景辐射影响测试精度。红外探测器工作于80K的工作温区,在进行性能测试前需要将探测器制冷到工作温度并保持稳定,通过调整黑体温度,获取不同温度下探测器输出信号,对输出信号进行处理获得探测器的性能。

图4 探测器单模块NETD测试Fig.4 Single module NETD test of the detector
然后,对调试后的系统开展了系统级NETD测试。在指定温度点附近选取两个温度点,两个温度点的温差应使得两个温度状态下的信号差大于两个温度状态下噪声平均值的10倍。测量相机在这两种温度状态下的信号和噪声,根据测量数据计算噪声等效温差。相机噪声等效温差测试示意图如图5所示。
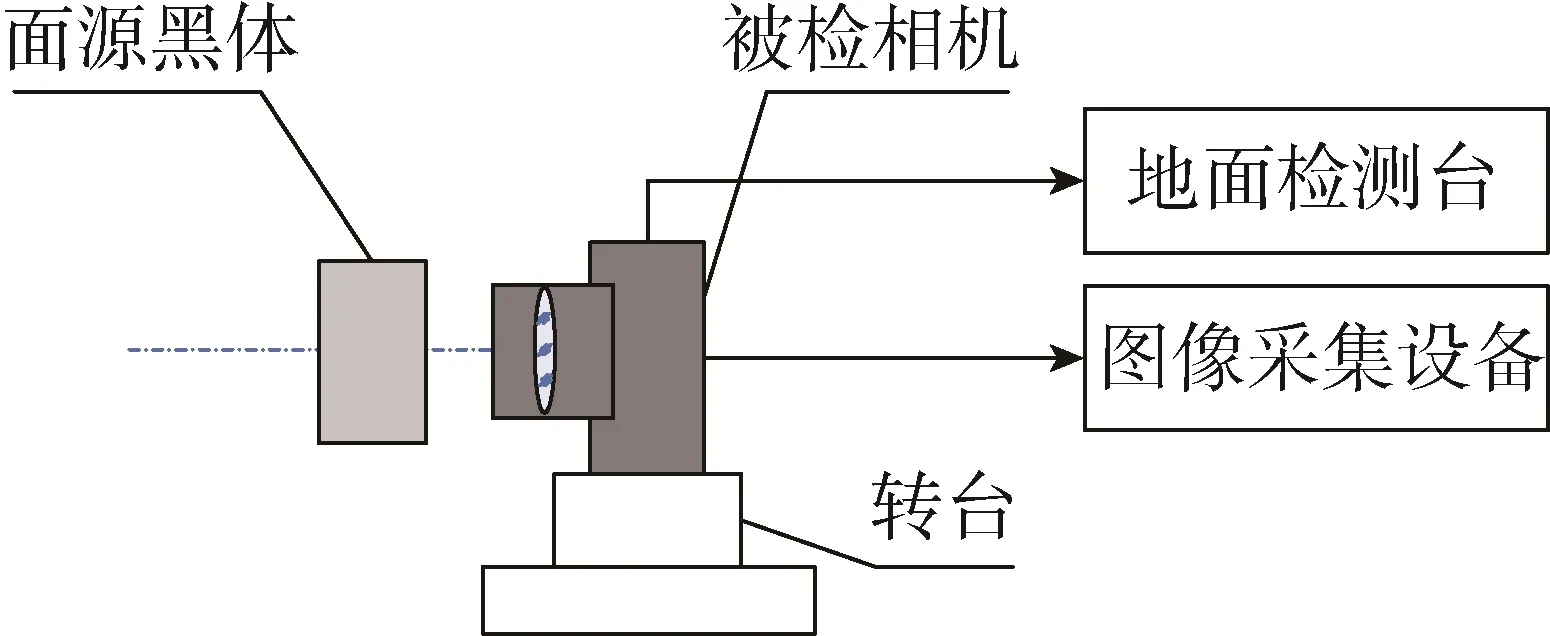
图5 相机噪声等效温差测试示意Fig.5 NETD test for the camera system
4 测试结果
4.1 系统MTF测试分析
按照测红外相机对比度传递函数(CTF)的方法进行测试[6],CTF是矩形靶标中,奈奎斯特频率下,黑白靶标DN值之差与DN值之和的比值,测试采用高对比度矩形靶标。在平行光管焦面处放置奈奎斯特频率高对比度矩形靶标[7],为相机提供无穷远目标。微调靶标使得靶标像与探测器像元重合[8],保证相位的一致性。
图6为奈奎斯特频率下的黑白条纹靶标图像。选择奈奎斯特频率的靶标[9]作为MTF的计算靶标[10],按照以下的步骤进行MTF的计算分析。

图6 系统MTF测试图像Fig.6 A system MTF test image
1)按式(1)计算所测空间频率下的靶标图像的调制度,选取其中的最大值作为该空间频率下的靶标图像的调制度

式中Mout()ν为空间频率为ν时靶标图像的调制度;DNw()ν为空间频率为ν时靶标图像的亮条纹灰度平均值;DNb()ν为空间频率为ν时靶标图像的暗条纹灰度平均值。
2)按式(2)计算所测空间频率下相机对比度传递函数[11-12]

式中 CTF(ν)为空间频率为ν时,相机的对比度传递函数值;M0(ν)为空间频率为0或接近0的靶标图像的调制度,实际测试中,可将低于vn/8(含)的空间频率近似为零空间频率,vn为奈奎斯特频率;k为影响因子,根据测试设备情况确定,一般在0.9~1之间选取[13]。
3)对空间频率为奈奎斯特频率时的MTF进行测试时,按式(3)计算相机静态调制传递函数值

式中 MTF(νn)为相机在奈奎斯特频率处的静态调制传递函数值;C TF(νn)为相机在奈奎斯特频率处的对比度传递函数值。
经分析计算,系统MTF为0.087 1。单独测试“委遥二号”红外相机光学系统的MTF为0.18,计算得到探测器MTF为0.48,满足不低于0.47的指标要求。
4.2 系统NETD和探测器NETD测试分析
使用“委遥二号”红外相机光学系统和“资源一号”02E星红外探测器联合进行系统NETD测试,主要测试了T1=299K和T2=301K黑体温度下(300K±1K)的信号和噪声,如表4所示。

表4 系统NETD测试结果Tab.4 System NETD test results
按式(4)计算噪声等效温差。分别计算黑体温度从T1到T2和从T2到T1条件下的噪声等效温差,将二者的平均值作为测试结果。
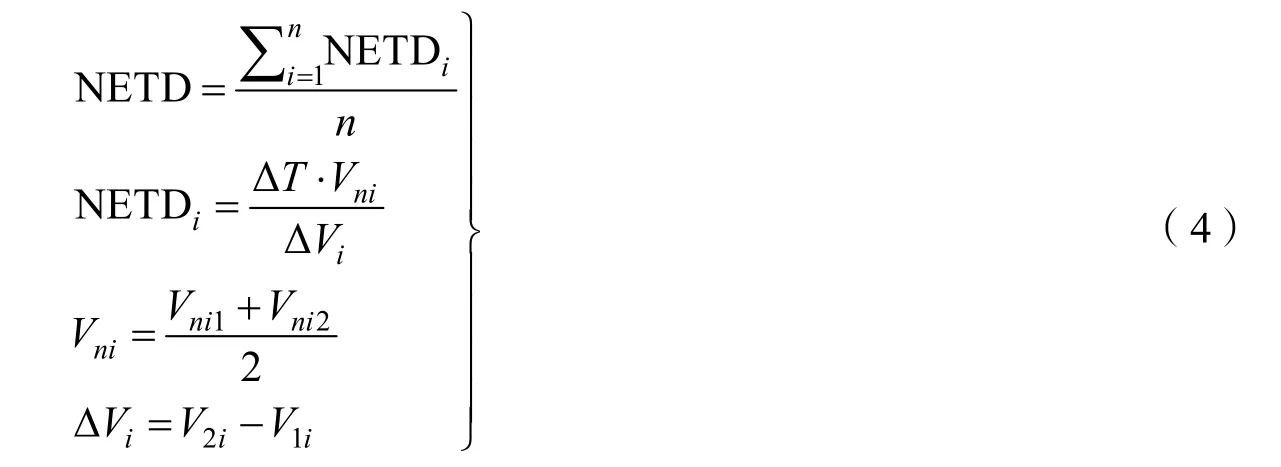
式中 NETD相机的噪声等效温差;NETDi为第i个探测通道的噪声等效温差;n为剔除盲元后的有效像元数;ΔT为温度差;Vni为第i个探测通道在两个温度点的噪声平均值;Vni1为第i个探测通道在T1温度状态下的噪声;Vni2为第i个探测通道在T2温度状态下的噪声;ΔVi为第i个探测通道在两个温度点的信号平均值之差;V2i为第i个探测通道在T2温度状态下的信号平均值;V1i为第i个探测通道在T1温度状态下的信号平均值。
按式(3)计算得到,黑体在300K温度条件下,系统NETD为0.07K,满足不大于0.1K的指标要求。
探测器NETD使用“资源一号”02星红外视频处理器电性产品与单模块探测器进行测试,测试结果如表5所示。
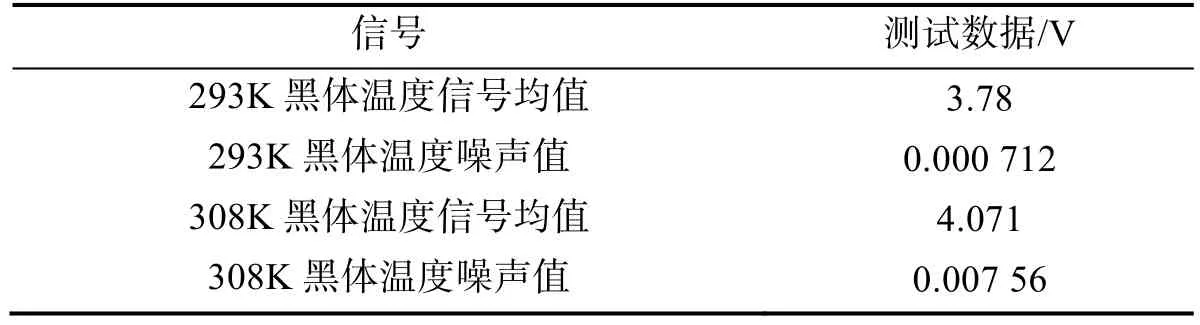
表5 探测器噪声等效温差测试结果Tab.5 Detector NETD test results
按照式(3)分析计算,探测器NETD结果为38.1mK,满足不大于50mK的指标要求。
实验数据表明,红外相机探测器实验片性能可以满足相机系统对探测器的指标要求,该红外探测器通过了摸底实验。结合等效光学系统,探测器装机后,相机主要系统指标可满足系统技术指标要求,其实验结果可作为正样相机研制技术要求的指标依据。
5 结束语
本文介绍了“资源一号”02E星红外相机单模块探测器性能摸底成像测试实验,提前获得了探测器的性能。通过采用“委遥二号”卫星红外相机光学系统与“资源一号”02E星红外相机单模块红外探测器进行组装开展系统级成像性能测试,对涉及的关键指标如单模块探测器NETD和MTF以及系统NETD进行了摸底测试。经测试,系统NETD为70mK,单模块探测器NETD为38.1mK,分别满足100mK和50mK的指标要求;探测器MTF为0.48,满足不低于0.47的指标要求。
本文通过搭建实验平台,实验总体方案能够满足探测器性能和系统性能的测试要求。通过实验验证了“资源一号”02E星红外相机单模块探测器性能水平和系统级的 NETD,达到了实验目的,实验测试结果有效,测试结果满足相关指标的要求。但由于采用的单模块红外探测器和视频处理电子学模块为电性产品,单模块红外探测器性能水平和视频电子学噪声水平较正样产品存在差异,通过预估分析正样产品红外探测器模块及系统性能将优于当前测试结果,能够实现更高的成像品质,满足定量化成像的指标要求。在后续正样研制阶段,还需要开展的工作如下:
1)根据摸底实验结果,提出正样探测器的技术指标;
2)对探测器的研制流程,特别是读出电路与探测器倒装互联等工艺流程进行控制和品质验证;
3)结合正样相机光学系统和制冷装置在正样阶段开展的红外探测器及相机系统性能测试,保障相机技术指标满足设计要求。
猜你喜欢
军民两用技术与产品(2021年10期)2021-03-16 06:05:10
上海交通大学学报(2020年4期)2020-05-07 09:38:42
小学科学(2020年1期)2020-02-18 06:26:40
百科探秘·航空航天(2020年12期)2020-01-22 08:57:19
世界农药(2019年3期)2019-09-10 07:04:10
小学科学(2019年12期)2019-01-06 03:38:45
光学精密工程(2016年4期)2016-11-07 09:04:48
中国中医眼科杂志(2016年6期)2016-04-08 06:53:00
肿瘤影像学(2015年3期)2015-12-09 02:38:45
电脑知识与技术(2014年16期)2014-07-28 05:22:45