用于电动致动器和传感器的离子弹性体
2021-09-17 06:09:52ChenrunFengHemanthaRajapakshaAntalkli
工程 2021年5期
Chenrun Feng , C.P. Hemantha Rajapaksha , Antal Jákli *
a Materials Science Graduate Program, Kent State University, Kent, OH 44242, USA
b Advanced Materials and Liquid Crystal Institute, Kent State University, Kent, OH 44242, USA
c Department of Physics, Kent State University, Kent, OH 44242, USA
1. 引言
致动器和传感器可将一种形式的能量转换成另一种形式的能量,这种能量包括机械能、热能、电能、光能或磁能[1-10]。刺激响应性材料(即通过刺激可改变形状或大小)可用于传感器和致动器,这些刺激可以是电场[11-19]、磁场[20]、热[21-23]、压力[24,25]、酸碱度[26,27]和光[17,28-32]。上述所有能量形式由于可以优先转换成电信号,因此可由计算控制设备进行操作和处理。在本文中,我们将集中探讨将电信号转换成机械响应(即应变、压力)的电动执行机构和将机械信号(即应变、压力)转换成可测量的电信号(即电流、电压、电阻或电容)的传感器。具体来说,我们将集中探讨具有低杨氏模量和高失效应变(软弹性)的橡胶状聚合物(弹性体),它们具有可逆变形的特性。本文还将重点介绍液晶弹性体(LCE)的最新结果,它将液晶(LC)的取向与聚合物网络的软弹性相结合。LCE可在不同的外部刺激下变形,如光[33]、热[34]和电场[35]。
基于介电弹性体[36,37]、铁电聚合物[38]和LCE [39,40]的电绝缘机电传感器,因重量轻、制造简单、价格低和高耐腐蚀性而有望用于柔性机器人领域中[41-43],但其需要高压电场(每毫米数千伏)[12]才能实现大规模驱动[11,44]。
由弹性体和离子组合而成的材料可用于人体运动监测[45-48]、柔性机器人[49-52]、健康监测[51]、假肢[51]和智能服装[47]的柔性/可穿戴传感器和致动器。在导电电极和电解质领域中,人们已对聚合物离子导体进行了多年的研究[50],可使聚合物离子导体器件由可移动的离子和电子构成。近年来离电子器件对高导电性离子弹性体的大量需求催生了大量可选择的材料种类,如光/热交联离子导电弹性体和不同尺寸的有机/无机离子 [53-56]。
离子电活性聚合物(iEAP)和弹性体(iEAE)利用离子传输促进了低电压操作和高响应信号的机电耦合,并因其在电池、柔性机器人和传感器领域中的优势而引起了广泛关注[57]。在施加的局部电场中或由于弯曲变形而具有不同尺寸的负离子和正离子在相反方向上的运动可产生用于能量收集的电容或将电能转换成机械变形。人们已在自然弹性体系统中发现这种机电耦合机制,如电鳗和鱿鱼的神经肌肉活动,它们将形状变形转化为电信号,反之,它们能够使用电信号驱动肌肉收缩。我们将从自然系统中学到的知识应用于柔性机器人[58-60]、皮肤传感器[61]和人工智能技术[62]中。
熔点低于室温的盐[称为离子液体(ⅠL)],通常由一种大体积的有机阳离子和一种较小的无机/有机阴离子组成,这种盐是iEAE的离子成分,其具有高导电性、低毒性、宽电化学窗口、高光学透明度、低挥发性、高热稳定性和良好的电化学稳定性[63-65],这些特性使ⅠL适用于电化学传感器[64,66,67]、能源装置[68-71]和致动器[55,72,73]等许多应用。此外,其对皮肤和眼睛无刺激性,无致敏性,无致突变性。研究者可以通过改变阳离子和阴离子的组合,在一定程度上调节上述性质[74,75]。弹性体与三维(3D)打印技术[76-78]兼容,能够用于创建微/纳米结构[79,80],具有自修复能力[81-84],甚至可以自供电[84],从而为先进的机器人和传感器技术提供更大的灵活性。
研究人员已对基于离子弹性体的应变[47,48,51,52,85]、压力[48,86-89]和剪切[90]传感器进行了大量研究。然而,针对离子弹性体研究的综述却很少[91-94],这也证明了本综述的合理性,我们总结了工业级离子弹性体致动器和传感器的材料及性能特性。在第2节中,我们综述了三类离子弹性体致动器:离子聚合物金属复合材料(ⅠPMC)、离子导电聚合物(ⅠCP)和离子聚合物/碳纳米复合材料(ⅠPCN)。在该节的最后,我们对未来的致动器进行了展望,如自适应四维(4D)印刷系统和离子液晶弹性体(iLCE)。第3节着重介绍了离子弹性应变和压力传感器。我们还讨论了用于生物力学和运动行为追踪的未来可穿戴式应变传感器。在第3节的最后,我们介绍了基于挠曲电信号的iLCE传感器的初步研究结果,以及通过将其与有机电化学晶体管(OECT)集成而对其进行的放大作用。最后,我们进行了概括性的总结,说明了行为、感知和适应之间的相互作用,这可应用于未来的离子弹性体致动器和传感器中。
2. 离子弹性体致动器
典型的离子弹性体致动器系统由夹在两个对电极之间的具有不同大小阳离子和阴离子的弹性体电解质组成[15]。在这种系统中,即使是微弱的低频或直流(DC)电场也会导致离子向相反方向漂移,导致一侧膨胀(压缩),较大(较小)的离子向一侧移动,并导致离子弹性体薄膜发生大的弯曲变形。由于其具备双向和低电压驱动能力,目前研究人员正考虑将离子弹性体致动器用于柔性机器人、空间探索、军舰和生物医学中。
可通过ε= (2dw)/(L2+d2) [95,96]计算由电压产生的与尺寸无关的应变(ε),其中,d是水平方向上的尖端位移,L是长度,w是膜的厚度。可表征离子弹性体致动器性能的参数是应变、应力、频率范围(带宽)和电动执行机构的安全操作窗口。这些参数主要取决于离子弹性体电解质的离子电导率、离子交换能力、电化学和机械稳定性,以及电极材料的电导率、电化学稳定性、机械顺应性和耐久性。限制该器件应用的因素包括电极和电解质材料的工业设计及其兼容性。
2.1. 离子弹性体致动器的材料设计
能够交联成离子弹性体的基础聚合物的化学结构如图1所示。
Tanaka等[97]首次研究了离子弹性体的低压致动,他们使用聚(丙烯酸)凝胶作为基础聚合物,在水性溶剂环境中溶胀。由于其离子电导率高(10-1S·cm-1),水性离子弹性体电解质,如Nafion [图1(a)]或聚环氧乙烷[PEO;图1(b)],与碱金属离子结合具有较大的弯曲振幅和快速响应(带宽约为100 Hz)能力,这使其适用于水下机器人领域[98-100]。研究发现,弹性网络内部形成的离子-水纳米簇或通道可促进离子传输。但是,反向弛豫和短循环寿命限制了其致动性能。
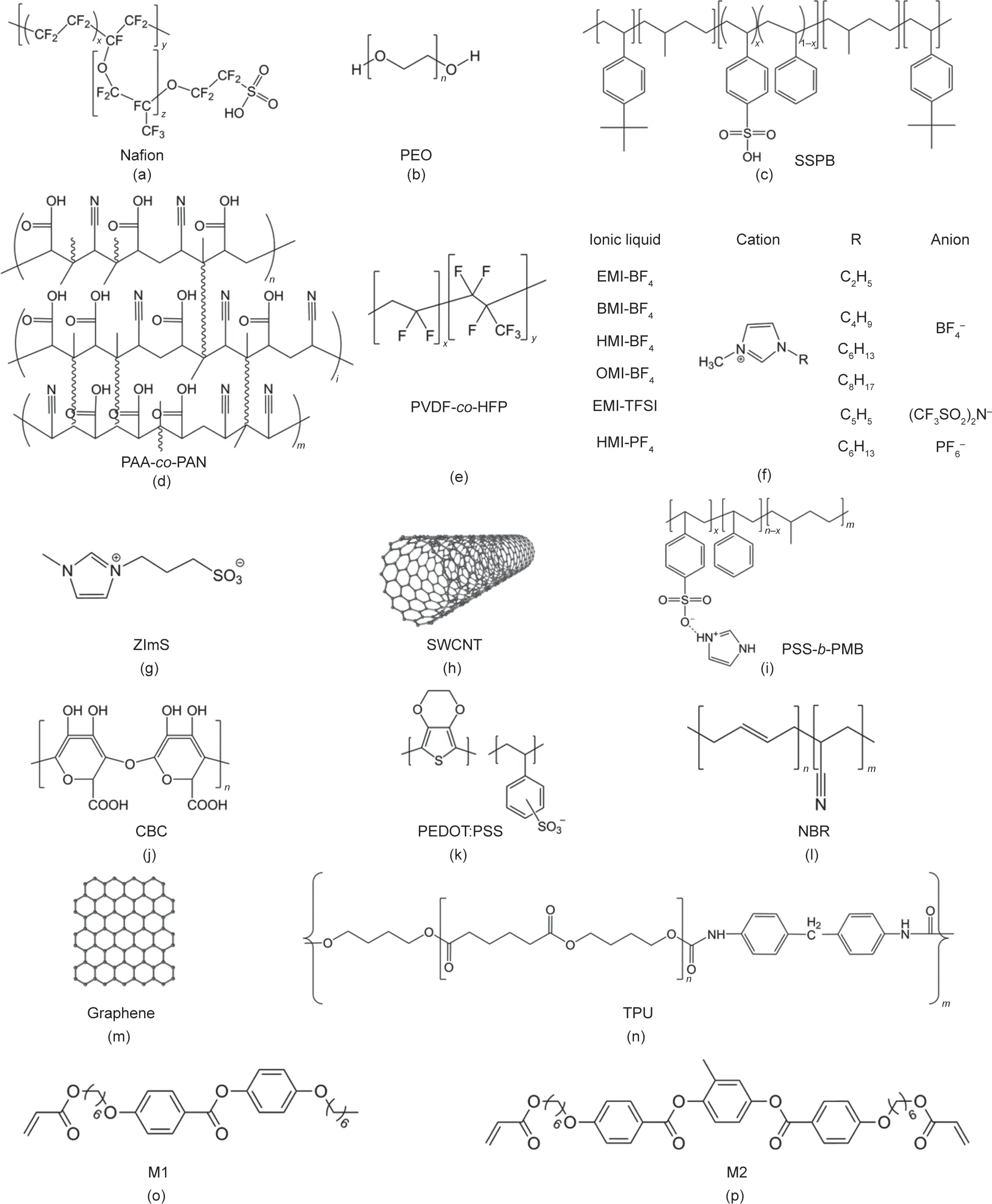
图1. 用于iEAE的典型离子弹性体材料的化学结构。Nafion(a)、聚环氧乙烷(PEO)(b)是使用最广泛的离子弹性体基础聚合物;聚[(叔丁基苯乙烯)-b-(乙烯-r-丙烯)-b-(苯乙烯-r-苯乙烯磺酸盐)-b-(乙烯-r-丙烯)-b-(叔丁基苯乙烯)](tBS-EP-SS-EP-tBS;SSPB)(c)、聚(丙烯酸)-co-聚(丙烯腈)(PAA-co-PAN)(d)、聚偏氟乙烯-co-六氟丙烯(PVDF-co-HFP)(e)是用于离子弹性体的嵌段共聚物;(f)总结了部分离子弹性体[EMⅠ:1-乙基-3-甲基咪唑鎓;BF4:四氟硼酸盐;BMⅠ:1-丁基-3-甲基咪唑鎓;HMⅠ:1-己基-3-甲基咪唑鎓;OMⅠ:1-辛基-3-甲基咪唑鎓;TFSⅠ:双(三氟甲基-亚磺酰基)酰亚胺;PF6:六氟磷酸盐];两性离子3-(1-甲基-3-咪唑鎓)丙磺酸盐(ZⅠmS)(g)、单壁碳纳米管(SWCNT)(h)是优化离子弹性体性能的处理剂;聚苯乙烯磺酸盐-b-聚甲基丁烯(PSS-b-PMB)(i)是与离子弹性体中离子基团自组装的嵌段共聚物;羧化细菌纤维素(CBC)(j)是用于离子弹性体的生物材料之一;聚(3,4-乙烯二氧噻吩)聚苯乙烯磺酸盐(PEDOT:PSS)(k)、丁腈橡胶(NBR)(l)是电极和基础聚合物贯通网络;石墨烯(m)是离子弹性体中使用的电极材料;热塑性聚氨酯(TPU)(n)是离子弹性体中常用的橡胶材料;4-(6-丙烯酰氧基-十六-1-基-氧基)苯基-4-(己氧基)苯甲酸酯(M1)(o)、1,4-双-[4-(6-丙烯酰氧基己基氧基)苯甲酰氧基]-2-甲基苯(M2)(p)是用于离子弹性体的液晶单体。
嵌段共聚物,如聚[(叔丁基-苯乙烯)-b-(乙烯-r-丙烯)-b-(苯乙烯-r-苯乙烯磺酸盐)-b-(乙烯-r-丙烯)-b-(叔丁基-苯乙烯)](tBS-EP-SS-EP-tBS;SSPB)五嵌段共聚物[图1(c)][101]、聚(丙烯酸)(PAA)-co-聚(丙烯腈)(PAN)[图1(d)][102]和聚偏二氟乙烯(PVDF)-co-六氟丙烯(HFP)[图1(e)][103],它们具有可控的相分离纳米结构,可用作离子交换膜,以增强弹性体内部离子的迁移率并减少反向弛豫。气动致动器,需要电化学性能稳定且挥发性低的ⅠL。合适的ⅠL包括1-乙基-3-甲基咪唑四氟硼酸盐(EMⅠ-BF4)、EMⅠ双(三氟甲基磺酰基)酰亚胺(TFSⅠ)(EMⅠ-TFSⅠ)、1-丁基-3-甲基咪唑鎓(BMⅠ)-BF4、1-己基-3-甲基咪唑鎓(HMⅠ)-BF4、1-辛基-3-甲基咪唑鎓(OMⅠ)-BF4和HMⅠ六氟磷酸盐(PF6)(HMⅠ-PF6)[图1(f)][104-106]。由于有机离子半径较大,当分散在弹性体中时,它们的离子迁移率很低。
为提高致动幅度和阻滞力,研究人员将上述嵌段共聚物与两性离子3-(1-甲基-3-咪唑鎓)丙磺酸酯(ZⅠmS)[图1(g)][16]、单壁碳纳米管(SWCNT)[107,108][图1(h)]、埃洛石纳米黏土(HNC)[102]、二氧化硅纳米粉末[109]或层状磺化蒙脱土(s-MMT)[110]结合,以提高离子传输能力和弹性体膜的机械强度。此外,聚合物(ⅠL)/离子聚合物,如环氧乙烷(EO)或碳氢化合物(HC)交联剂系链的咪唑鎓阳离子或TFSⅠ阴离子[111,112],以及掺杂咪唑的聚苯乙烯磺酸酯(PSS)-b-聚甲基丁烯(PMB)[图1(i)],其在薄膜上具有垂直自组装六边形离子通道[16],以改善ⅠL中弹性体的离子导电性[113]。
在生物医学/可生物降解应用领域,纤维素基[114]和壳聚糖基[115]的生物材料,如羧化细菌纤维素(CBC)纳米纤维网络[图1(j)],显示出良好的离子导电性和生物相容性。为增加软质弹性体和电极之间的相容性,研究人员将电极与离子弹性体结合,例如,通过将3,4-乙烯二氧噻吩(EDOT)[图1(k)]与聚环氧乙烷(PEO)/ 丁腈橡胶(NBR)在聚合物网络(ⅠPN)(PEO/NBR-ⅠPN)中相互聚合[116,117],如图1(b)和(l)所示。
各类电极都可对离子弹性体上施加电场,包括金属、导电聚合物(CP)[如聚(3,4-乙烯二氧噻吩)(PEDOT): PSS;见图1(k)]和纳米碳[如单壁碳纳米管(SWCNT)和石墨烯;见图1(h)和(m)]。致动器的致动速度和幅度因其用途的不同而不同。因此,研究人员将许多先进的电极和离子弹性体膜材料进行工业设计并组装在一起,用于各种离子弹性体电动致动器应用中。目前的离子弹性体致动器可分为三大类:ⅠPMC、ⅠCP和ⅠPCN。
2.2. 离子聚合物金属复合致动器
自20世纪90年代以来,使用夹在两个金属电极之间的离子弹性体膜制作的ⅠPMC是使用最广泛的离子弹性体致动器之一[118]。当在弹性体上施加小电场(每毫米数伏)时,储存在膜内的不同尺寸的离子或离子簇将从一侧移动到另一侧,导致致动器弯曲(因为一侧的体积会超过另一侧)[119,120]。最初,由于其良好的离子导电性(约0.1 S·cm-1),包含阴离子磺酸盐和羧酸盐基团[123,124]的含水离子弹性膜,如Nafion [121]和Flemon [122],可以使ⅠPMC提供快速响应的能力[125]。如图2(a)所示,离子弹性体在电解质溶液或溶胀状态时,其中固定的阴离子基团会产生纳米通道,作为铵离子/碱金属(H+、Li+、Na+、K+、BMⅠ+)与水团簇进入内部的通道[98,99]。针对具有不同阳离子-水团簇的Pt-Nafion致动器进行的实验表明,最小的阳离子具有最佳的离子迁移率和最高的吸水性、弯曲速率和阻滞力[图2(b)][100]。然而由于水会从致动器中泄漏和蒸发,以及带金属电极的含水电解质的电化学稳定性较差,当致动器在空气中运行时,其工作密度或应力会受到限制,会出现反向弛豫和发生腐蚀的现象[105,126,127]。
研究人员利用疏水ⅠL制造了一种具有稳定空气性能的ⅠPMC致动器,如EMⅠ-BF4、EMⅠ-TFSⅠ、BMⅠ-BF4、HMⅠ-BF4、OMⅠ-BF4等[图1(f)][104-106,128]。但是,由于在干燥条件下离子电导率不足,基于ⅠL的疏水ⅠPMC的驱动响应速度较慢。为增强离子迁移率和ⅠPMC产生的力,研究人员制作了自组装嵌段共聚物-ⅠL复合膜,如磺化聚(苯乙烯-b-乙烯-co-丁烯-b-苯乙烯)(SSEBS)[129]、PAA-co-PAN [102]和PVDF-co-HFP [103],通过可控相分离在弹性网络内部形成纳米结构的离子通道[120]。此外,研究人员还使用了由阳离子和阴离子辐照改性的离子交换膜,如具有单离子驱动的咪唑链系三嵌段共聚物[130],以提高驱动幅度和响应时间,并消除反向弛豫[131]。
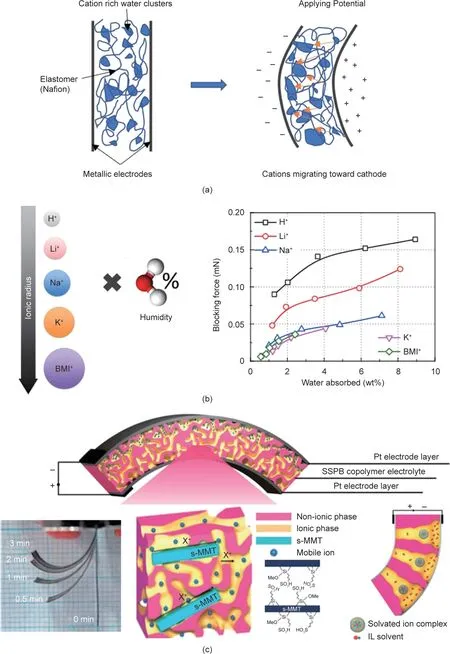
图2. 多个ⅠPMC致动器的性能说明。(a)基于Pt-Nafion复合膜的ⅠPMC致动器的结构示意图(左)和弯曲示意图(右),蓝色区域是Nafion-离子弹性体内部水-离子缔合形成的纳米簇;(b)Pt-Nafion致动器中不同大小的阳离子及其对性能的影响;(c)使用嵌段共聚物(SSPB)和s-MMT增强离子迁移率和弹性体膜内体积膨胀的可分离离子弹性体致动器的工业设计示意图,及其在5 V电压下的弯曲性能。(b)经Elsevier B.V.公司许可,转载自参考文献[100],©2020;(c)经Royal Society of Chemistry许可,转载自参考文献[101],©2013。
图2(c)[101]所示为采用层状磺化蒙脱土(s-MMT)[110]纳米复合材料的新型五嵌段共聚物(SSBP)弹性体[图1(c)]内部的相分离离子和非离子区域。微相分离形态在弹性体内部具有数十纳米宽的受控离子通道,可将ⅠL的吸收量和离子电导率增加到Nafion/ⅠL系统的两倍以上。s-MMT和溶剂化离子之间的相互作用为传质提供了更宽的离子通道,并将弹性模量提高到89 MPa。当在空气中运行时,致动器在2 V DC电压下表现出约1.2%的弯曲应变,10 min内无任何反向弛豫。
驱动能力不仅取决于聚合物和反离子的类型,还取决于沉积在离子弹性体膜上的金属电极的质量、厚度和有效表面积。第一代ⅠPMC在电解质膜的两侧使用化学沉积铂电极[120,132,133]。后来,研究人员通过物理和化学沉积方法制备了更经济的柔性金属电极,如铜、钯、银和金[134,135]。金属电极由于具有低表面电阻和高电流密度,能够提供更快的驱动速度(约0.1 s)和更大的弯曲应变(>3%)[136]。然而,与ⅠPMC致动器的稳定性能相反,其电极和离子弹性体膜之间的不良的界面相容性会导致电极脱层、疲劳和破裂[55,124,137]。研究人员发现可通过采用不同尺寸、形状和表面粗糙度的金属纳米粒子对界面面积进行优化,以增强金属电极的电荷积聚和黏附能力[138-140],此外,还可将金属纳米粒子注入中间层[102,135,137,141]。Yan等[102]提出了超声团簇束注入(SCBⅠ)的方法[142],用于将大约100 nm厚的团簇组装电极注入到距离高导电性和可拉伸性的离子弹性体膜表面的几十纳米处[图3(a)~(c)]。在这种情况下,离子弹性电解质由PAA-co-PAN [图1(d)]网络与HNC [143]以及四乙基铵离子(TEA+)和乙二醇二甲基丙烯酸酯交联剂混合制成。研究人员发现在致动器系统中添加额外的ⅠL EMⅠ-BF4作为TEA+的传输介质后,其在5 V下的最大驱动应变增加到1.04% [图 3(d)]。由于金纳米团簇电极具有良好的黏附性和充足的相互作用面积,致动器响应频率高达10 Hz,并在2 V和1 Hz下进行76 000次循环时无反向弛豫或电极坏损现象。
经适当编程和工业设计后,ⅠPMC可在飞行/爬行机器人扑动致动器[144-147]、仿生机器鱼[148,149]和具有多自由度机械手的人工关节[150]领域拥有巨大的潜力。表1 [98,100-102,108,122]总结了ⅠPMC致动器的重要特性。
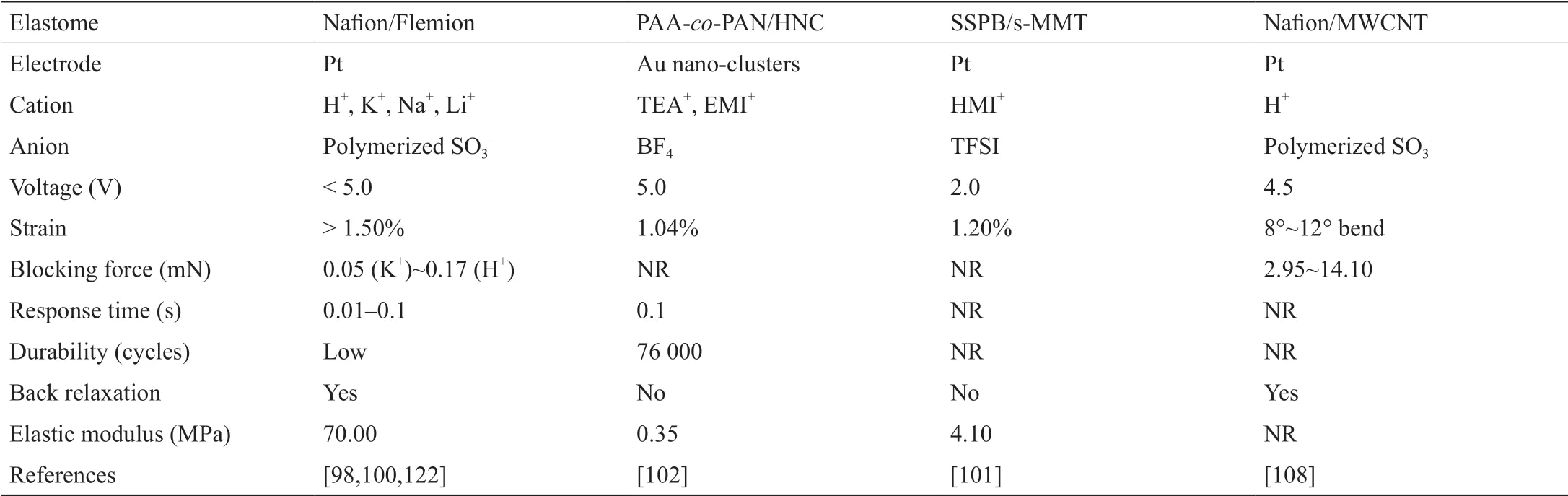
表1 ⅠPMC致动器重要参数汇总
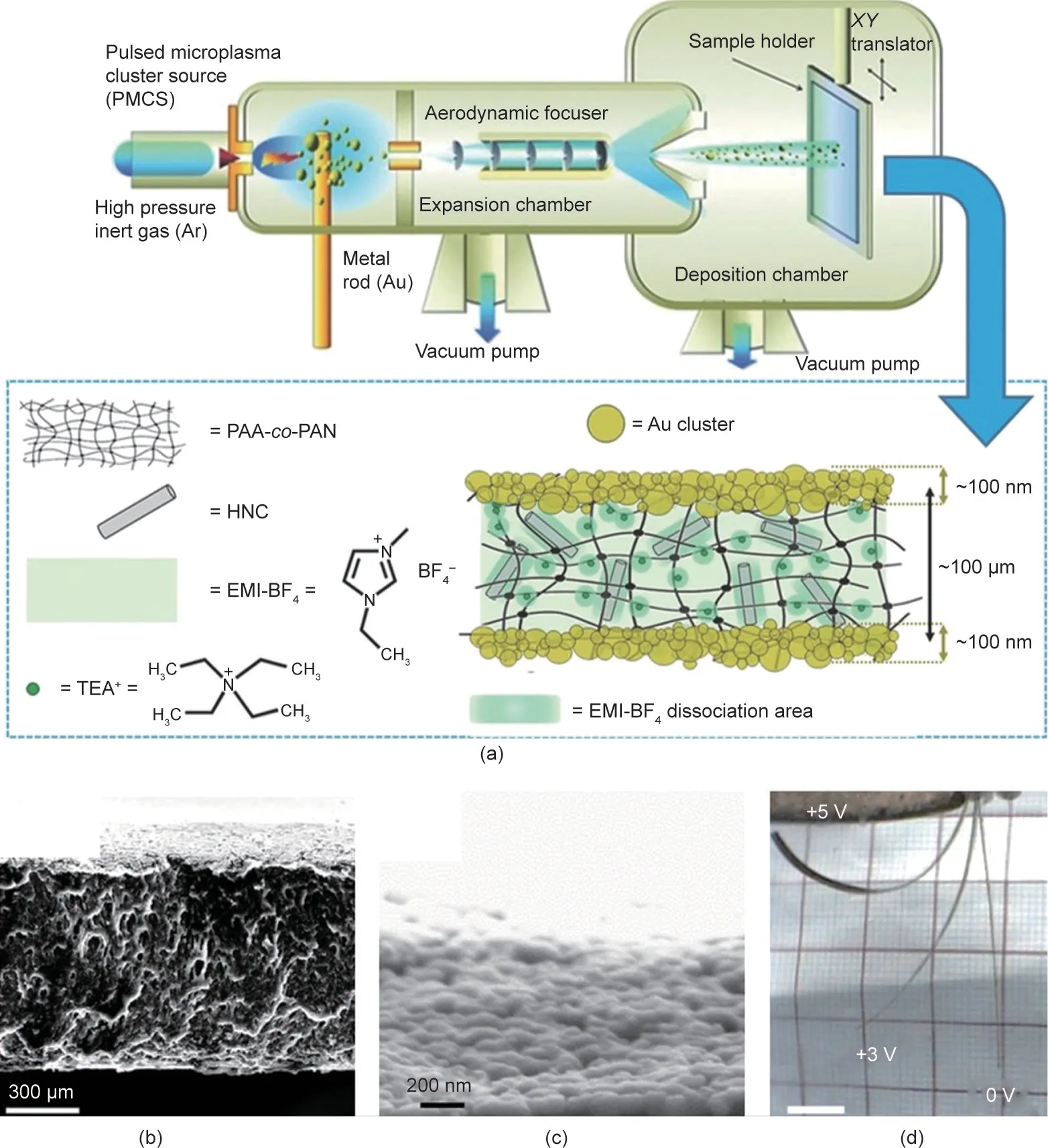
图3. 含金(Au)电极的基于PAA-co-PAN的ⅠPMC致动器。(a)将金纳米团簇组装电极注入离子弹性体膜的装置示意图;(b)致动器横截面的扫描电子显微镜视图;(c)金电极表面的纳米形貌;(d)致动器弯曲变形。经Wiley-VCH Verlag GmbH & Co. KGaA许可,转载自参考文献[102],©2017。
2.3. 离子导电聚合物致动器
共轭聚合物,如聚吡咯(PPy)[151]、聚苯胺(PANⅠ)[152]、聚噻吩(PT)[153]和PEDOT:PSS [154,155],既可用作电极,也可用作具有体积变化功能的大型弹性体致动器。这些共轭聚合物一旦掺杂了离子就具有导电性,在不掺杂离子时具有半导电性[156,157]。
插入电子后,共轭聚合物可带负电荷(n掺杂),取出电子后,共轭聚合物可带正电荷(p掺杂)。当施加小电势(0~30 V)时,电解质中的阳离子或阴离子会移入p掺杂(或n掺杂)的共轭聚合物链中,使总体积膨胀。如图4(a)[41]所示,如果电场方向相反,共轭聚合物将随着离子的移出而收缩。随着应变达到40%,其产生了线性变化和对称体积的变化,由此可设计为致动器[图4(b)中的(i)和(ii)],如空心管[116]、纺织品和纤维[158]。然而,对大型共轭聚合物致动器进行操作通常需要反电极和电解质溶液环境。由夹在两个共轭聚合物层之间的离子弹性体膜组成的三层致动器较易于制造,且能够在干燥或潮湿的条件下运行,当在膜上施加电压时,能够在一个电极膨胀而另一个电极收缩的情况下表现出双向弯曲变形[图4(b)中的(iii)和(iv)]。
在各种共轭聚合物中,经溶液处理的PEDOT:PSS [图1(k)]已完全商业化。其在空气中化学性质稳定,易于通过喷墨或3D打印沉积[159,160]。但是它有很多局限性,比如由于其导电性差会导致响应慢,由于电容小而导致应变和应力弱以及机电耦合效率低。研究表明ⅠL的存在可提高共轭聚合物的导电性和弹性[161]。最初,为提高离子导电性,研究人员在共轭聚合物和离子弹性体膜之间涂覆金属层[162]。然而,共轭聚合物和金属之间的脱层现象降低了其性能和寿命。采用诸如银(Ag)纳米线[163]或碳纳米管(CNT)[图1(h)]的纳米材料,将其分散到共轭聚合物电极中,以增强导电性和各向异性的机械强度,而不是采用额外的金属层。Wang等[155]提出了一种如图5(a)所示的基于多壁碳纳米管(MWCNT)-分散PEDOT:PSS(M-PEDOT:PSS)电极的高性能共轭聚合物致动器。
研究人员通过氢键和π-π键的堆积将MWCNT插入PEDOT和PSS聚合物链之间,并沿PSS链排列。所得到的多孔结构M-PEDOT:PSS电极提高了离子存储容量(约100 F·g-1)、电导率(约150 S·cm-1)和机械强度(约1 GPa),比用纯PEDOT:PSS电极获得的性能高数倍。研究人员同时对使用热塑性聚氨酯(TPU)、EMⅠBF4ⅠL和M-PEDOT:PSS电极的离子弹性体致动器的性能与图 5(b)中具有PEDOT:PSS电极的相同弹性体的性能进行了比较[164]。实验结果表明,该致动器在2.5 V下产生了0.64%的峰间值致动应变和1.43 mN的阻滞力,在 1 Hz下的寿命可达1 × 105个周期。
为减少脱层,研究人员在共轭聚合物电极和离子弹性体之间涂覆了界面聚合物层[165]。如图5(c)所示,通过将基于离子导电PEO的互穿聚合物网络与PEDOT电极相融合[166-168],实现了离子弹性体膜和共轭聚合物电极之间的良好黏附性和弹性。PEO/NBR[图1(b)和(l)]互穿聚合物网络膜的相分离纳米结构由于PEDOT电极相互穿透作用可产生高达10-3S·cm-1的离子电导率和高达2.4%的最大弯曲应变[167]。由于可通过添加不同量的聚苯乙烯(PS)成分调节致动器的弯曲应变和机械强度,互穿聚合物网络致动器可用于设计血管和神经元的管状手术导管[169],以及用于纺织品致动器的线性和弯曲纤维[170,171]。这些互穿聚合物网络致动器的致动能力高达1 kHz [172],可用于飞行机器人的翅膀[图5(d)][164]。
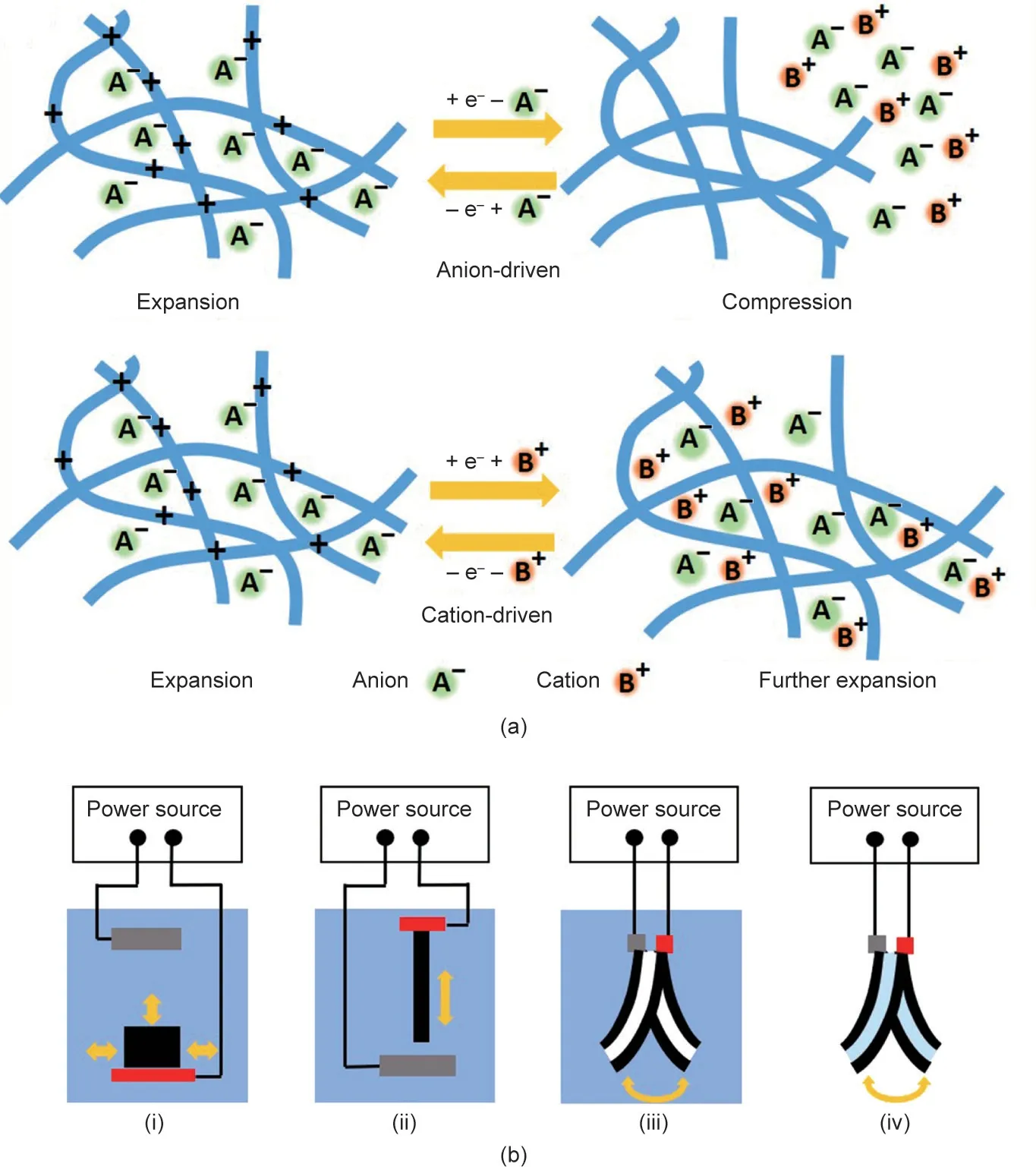
图4. ⅠCP致动器示意图。(a)一种p掺杂的共轭聚合物的驱动机制;(b)不同类型共轭聚合物致动器的变形:(i)体积膨胀和收缩;(ii)线性伸长和收缩;(iii)潮湿条件下的弯曲致动;(iv)空气中的弯曲致动。
使用具有生物相容性和生物可降解特性的材料的共轭聚合物致动器适用于折纸技术和生物医学微型机器人。例如,具有PEDOT:PSS电极的多孔细菌纤维素膜(BC)[114,173]和具有PPy或PANⅠ电极的纤维纸[174]可以产生快速响应,无反向弛豫,表现出了良好的机械强度和大幅度弯曲变形。
由于共轭聚合物的掺杂对电极的颜色、机械性能、导电性、体积和孔隙率有直接影响,共轭聚合物致动器具有广泛的应用,如线性/弯曲纤维、隔膜/微泵、发光二极管、游泳机器人、药物输送、主动导管、透镜、电池、超级电容器、电致变色装置、离子选择膜、盲文显示器、微电子学、传感器等[175,176]。表2 [114,155,162,167,172]总结了离子共轭聚合物致动器的主要特性。
表2 所选ⅠCP致动器的主要参数
2.4. 离子聚合物/碳纳米复合致动器
研究人员已将非金属纳米材料如碳纳米管(CNT)[115,177]、石墨烯[178-180]和石墨氮化碳[181]应用到ⅠPCN弯曲致动器的电极材料。与金或铂相比,这些纳米粉末成本低(目前石墨烯价格小于100 USD·kg-1),且易于通过浇铸或自组装的方式涂覆到离子弹性体上,并能形成具有高比表面积和稳定性的极柔顺性电极[182]。
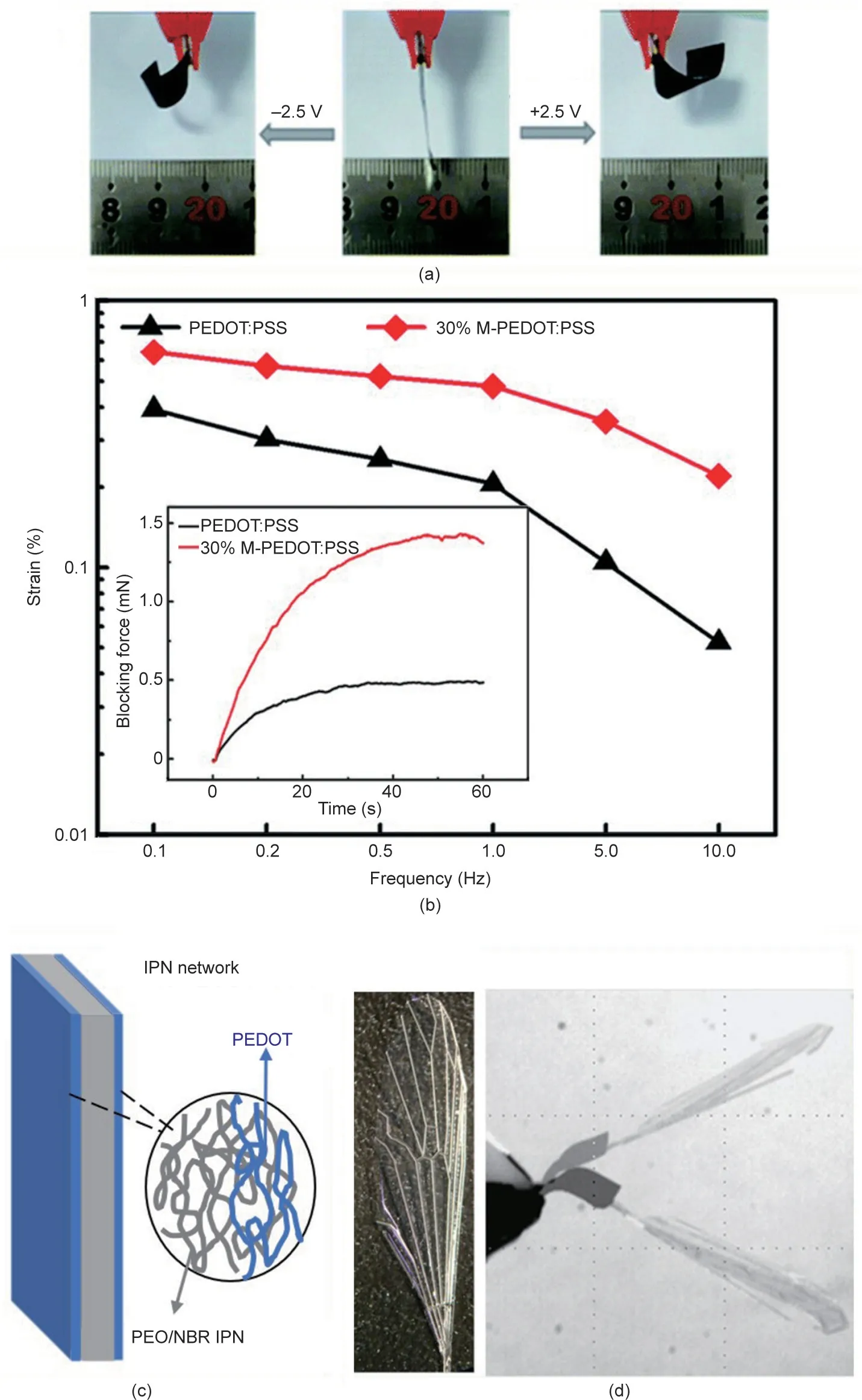
图5. 共轭聚合物致动器示意图。(a)在±2.5 V下的弯曲驱动性能;(b)通过热压在MWCNT分散的PEDOT:PSS(M-PEDOT:PSS)电极之间的TPU:EMⅠBF4离子弹性体在不同频率下的弯曲应变。小图:阻滞力与时间的关系;(c)纳米结构示意图;(d)基于PEO的三层互穿聚合物网络致动器的生物模拟振动翼。(a)、(b)经Royal Society of Chemistry许可,转载自参考文献[155],©2017;(d)经Wiley-VCH Verlag GmbH & Co. KGaA许可,转载自参考文献[164],©2019。
首个ⅠPCN致动器是由单壁碳纳米管电极、ⅠL和基础弹性体组成的硬脆性凝胶致动器[128,183-185]。研究人员将碳纳米管电极分散在离子弹性体中,或直接沉积在表面,组装成三层致动器[186-188]。Kim等[16]使用六边形纳米结构PSS-b-PMB嵌段共聚物[图1(i)]演示快速切换硬脆性凝胶致动器的过程,其中咪唑阳离子作为单离子致动弹性体与之结合。他们通过使用两性离子ZⅠmS [图1(g)]改善了阳离子传输,实验表明致动器可产生巨大的应变(±3 V时为1.8%),并且具有比PVDFco-HFP基/Nafion基的硬脆性凝胶致动器快约100倍(20 ms)的响应速度。在具有碳基电极的离子弹性体致动器中,弯曲是由将电荷不对称地注入碳纳米管阴极和阳极造成的。因此,电极的容量和导电性是影响弯曲应变/应力和响应时间的关键因素。为增加电荷载流子和活性表面积,人们已在电极中采用了各种具有多孔结构的纳米碳,如碳化物衍生碳[189-191]、活性炭纳米纤维[192]、碳气凝胶[193]、MWCNT [194]和纳米多孔碳[195]。此外,在应变(1.9%, ±2 V)和强度(8.8 MPa)条件下,在碳纳米管脆硬性凝胶中添加纳米粒子增加电极层的容量,如介孔二氧化硅(MCM)、PANⅠ和炭黑[196]。但是,纳米碳材料的电导率低于金属电极,通常需要金属背衬来提高电导率[175]。可通过化学气相沉积法(CVD)将垂直排列(VA)的单壁碳纳米管电极[177,197]直接沉积在离子弹性体层上[188]。由于致动器中的VA-CNT通道的连续路径,其高电导率、快速离子传导和强弹性模量将弯曲应变提高了8%以上,同时在4 V电压下致动速度提高到每秒10%应变。
研究人员还设计了多种分级纳米结构碳电极来提高ⅠPCN致动器的性能[115,198]。Wu等[199]制备了基于分级黑磷(BP)的碳纳米管,作为基于PVDF-co-HFP [图 1(e)]的三层致动器的电极。如图6(a)[199]所示,电极具有有序的层状结构,较大的相互作用面积和电容,可实现离子对的顺利传输。增强的BP-CNT分层电极容量产生了约2%的最大弯曲应变,快速响应高达20 Hz [图 6(b)]。致动器经过适当的工业设计后可用作振动翼或人工抓手。二维(2D)材料,如具有嵌入离子和良好排列结构的石墨烯纳米片[图1(m)],尽管石墨烯层的重新堆积会降低寿命,但其具有比碳纳米管电极更大的表面积、透光度和体积膨胀率(> 700%)[103]。Lu等[200]将银纳米粒子掺杂到还原的氧化石墨烯(rGO)中,以增强电极的导电性和排列稳定性,从而开发出高频弯曲致动器。近期他们已将离子交联MXene(过渡金属碳化物、氮化物或碳氮化物的2D层)用作具有高导电性和容量的电极。使用具有有序的层状结构的Ti3C2Tx-PEDOT:PSS(Ti3C2Tx-PP)[图6(c)][201]制作的电极可将体积电容提高到约1 kF·cm-3,在Nafion基的离子弹性体致动器中可实现离子的快速传导。该致动器在1 V至20 Hz时表现出亚秒级上升时间和高达1.37%的最大弯曲应变以及良好的弹性,且在高达18 000次循环时稳定无脱层现象。图6(d)为采用Ti3C2Tx-PP致动器制成的花状致动器。
碳纳米复合材料也可以分散到离子弹性体中,以产生可调节的刚度并提高离子电导率[107,202]。依据上述原理,研究人员制造了一种与富含碳纳米管的导电弹性体相互穿透的3D大孔网络[203],实验证明该致动器在375 V·m-1电场中将可离子电导率提高至接近2 × 10-2S·cm-1,弯曲角度高达80°。
由于纳米碳材料具有低成本、弹性高、透明性好和轻质性的特点,ⅠPCN致动器在仿生微机器人、隔膜型微泵、有源微导管、触觉显示器、盲文显示器和移动透镜中具有潜在的应用价值[204]。表3 [16,103,128,199,201]总结了ⅠPCN致动器的主要特性。表4总结了三类离子弹性体致动器的优缺点。
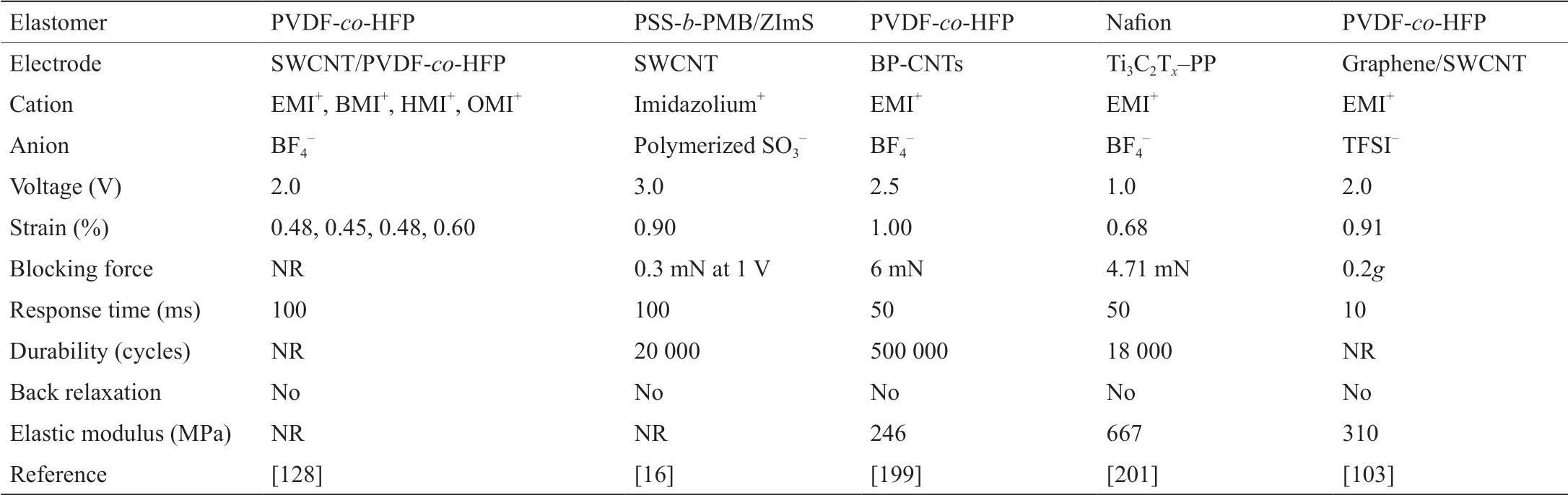
表3 所选ⅠPCN致动器的性能总结

表4 三类离子弹性体致动器的优缺点
2.5. 离子弹性体在机电致动器中的前景
离子弹性体柔性致动器在柔性机器人、生物医学工程、微型机械手、流量控制等方面有着理想的应用前景[146,205,206]。目前的离子弹性体致动器响应速度慢、致动能力弱、需要图案化电极实现复杂形状并缺乏多功能性。解决上述问题不仅需要新型的智能结构材料,还需要先进的制造技术、可编程控制器和工业设计。
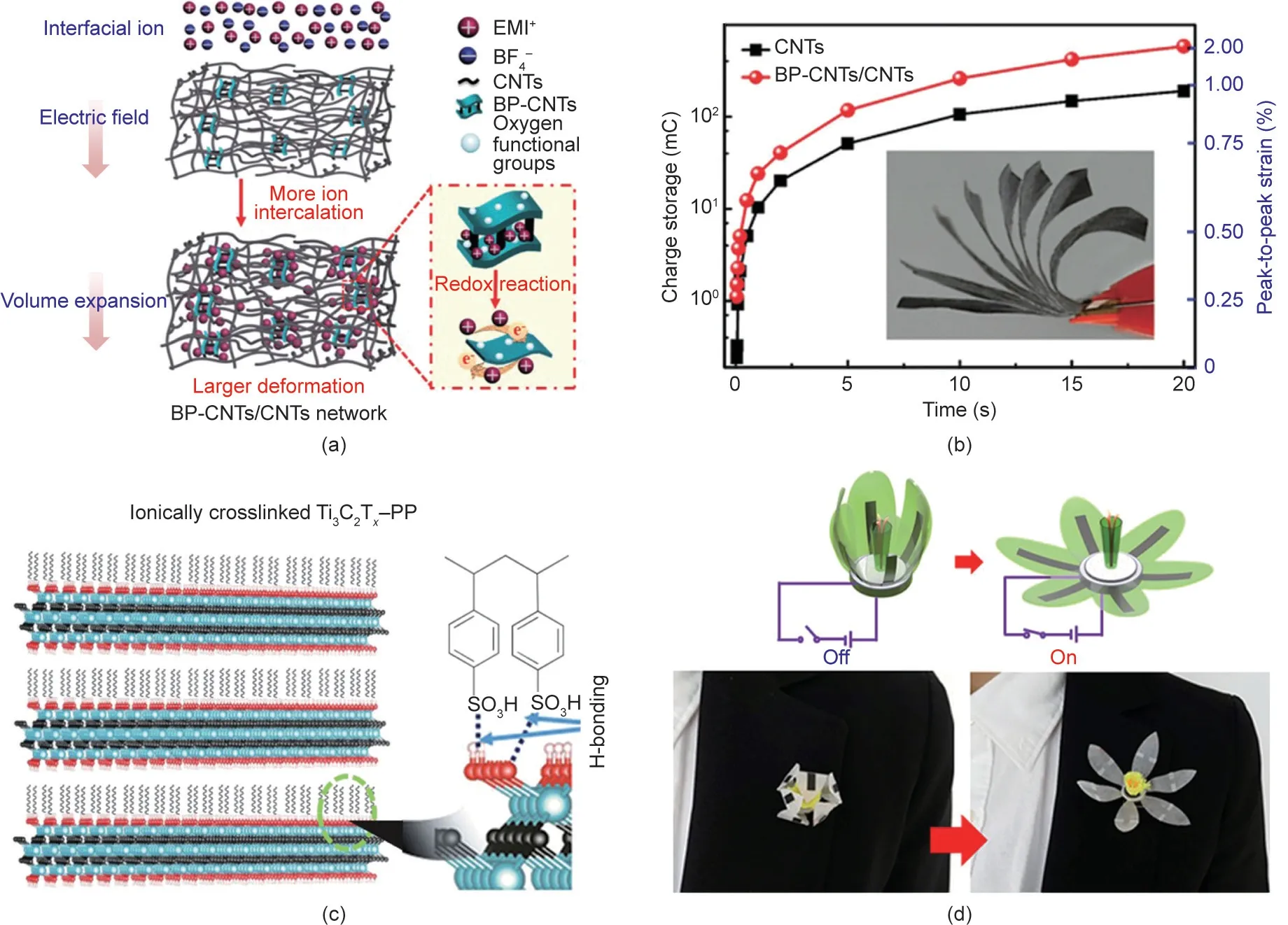
图6. 具有分级纳米结构碳电极的离子弹性体驱动器。(a)基于BP的碳纳米管电极内部结构和离子传输示意图;(b)在2.5 V下驱动应变电荷存储容量与时间的关系(弯曲条带的重叠图像);(c)离子交联Ti3C2Tx-PP电极的层状结构;(d)由Ti3C2Tx-PP致动器和线形成的花形致动器。(a)、(b)经Wiley-VCH Verlag GmbH & Co. KGaA许可,转载自参考文献[199],©2019;(c)、(d)经作者许可,转载自参考文献[201]。
尽管独立电极电路的集成对离子弹性体致动器来说是一个挑战,但新兴的3D打印技术为制造具有复杂结构和高分辨率的柔性材料提供了一种新的方法,可实现快速原型制作、定制设计和一步生产[160]。随着时间的推移具有响应致动能力(时间为新的维度)的3D打印结构称为4D印刷致动器[207]。通过精确的工业设计和数学建模,人们可根据反应参数对多轴驱动装置进行路线设计和任务的编程[208]。由3D打印传感器集成的4D打印致动器可通过控制器和建模系统调整其变形,该建模系统可实现刺激响应功能,从而可实现自适应4D打印系统,如图7(a)[209]所示。
自感知和多响应离子弹性体致动器可提供运动、曲率、湿度、光和温度的实时反馈[210,211],是环境控制自适应机器人的理想器件。例如,具有轻质、软变形和低功耗的离子弹性体致动器未来在航空航天领域中,如人类和环境控制的飞机机翼变形领域,具有广阔的应用前景,如图7(b)所示[212,213]。此外,在未来的柔性机器人运行过程中,高容量的离子弹性体可实现自供电和无线控制。柔性可穿戴机器人可对人类活动的交互进行定量评估和程序化,以便通过将智能离子弹性体致动器与机器学习相结合,达到辅助和模拟人类行为的目的[图7(c)][214]。在未来,生物相容性离子弹性体致动器可用于微型生物医学机器人,用于药物输送、外科手术、诊断成像和心脏辅助设备[215]。
在离子弹性体致动器低电压弯曲致动的激励下,研究人员将具有不同大小的正负离子迁移率的1-己基-3-甲基咪唑鎓(HMⅠM)-PF6ⅠL加入到由4-(6-丙烯酰氧基-十六-1-基-氧基)苯基-4-(己氧基)苯甲酸酯(M1)和1,4-双-[4-(6-丙烯酰氧基己基氧基)苯甲酰氧基]-2-甲苯(M2)光聚合的LCE网络中[图1(o)和(p)],以获得首个iLCE [73]。研究表明,iLCE可被小于1 V的电压驱动,其弯曲应变与发展成熟的iEAP相当。此外,iLCE具有独特的优点,如其驱动取决于液晶矢量方向的排列(图8)。研究人员通过在空间上改变各向异性LCE的排列,最终可轻松地实现对应变的方向和大小的预编程,实现对柔性机器人器件的精确控制。具有混合排列的向列LCE(即指向矢量在一个基板上平行于表面,在另一个基板上垂直于表面)是热活性的,并且由于薄膜两侧的各向异性热膨胀系数,该种弹性体已获得较大的弯曲曲率[21,216,217]。因此,混合iLCE能够提供双驱动(热和电)。与目前的离子弹性体相比,LC的多响应性(如磁场和光响应)也提供了广阔的新型应用前景。
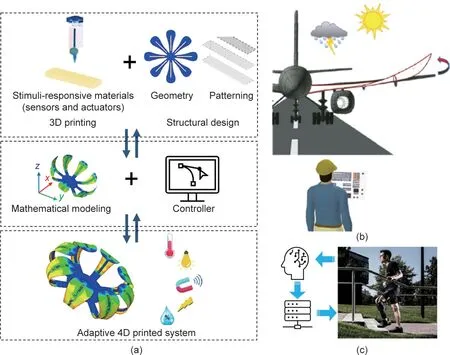
图7. 离子弹性体致动器的未来加工和应用。(a)结合传感和驱动功能的自适应4D打印柔性机器人的设计理念;(b)用于由人类和环境控制的飞机机翼变形智能致动器的未来设计;(c)辅助人类活动的人工智能致动器。(a)经作者许可,转载自参考文献[209],©2020;(b)经作者许可,转载自参考文献[212],©2020;(c)经Nature许可,转载自参考文献[214],©2018。
图8. iLCE的分子排列和弯曲性能。(a)平面排列;(b)混合排列;(c)垂直排列;(d)各向同性排列。经Wiley-VCH Verlag GmbH & Co. KGaA许可,转载自参考文献[73],©2019。
3. 离子弹性体机电传感器
机电传感器可将机械变形转换成可测量电量,如电流、电压、电阻或电容。机械变形可以是均匀应变(压缩或膨胀),用数学方法描述为Si= Δli/li= const(其中li是材料在某个方向上的长度,Δli是其变化量),或者是具有应变梯度的非均匀应变,dSi/dxi≠ 0挠曲引起的弯曲变形是非均匀应变的一种特殊情况。机电传感器可由碳基材料[218-220](碳脂、碳纳米管、石墨烯片)、液态金属[221,222]、金属[223]、金属纳米线/颗粒[224-229]和聚合物[230-232]制成。机电弯曲传感器应用广泛,在诸多机器人[233]和测角手套[234]中至关重要,研究人员也设想将其用于人造皮肤应用[235]。目前的弯曲传感器可通过改变电阻[236,237]、电容[238],或通过产生挠曲电和挠曲离子电流来对应变做出响应。
大多数基于离子弹性体的应变和压力传感器为电阻式、电容式或挠曲离子式。电阻技术使用电阻R=ρl/A测量,其中R、ρ、l和A分别是介质的电阻、电阻率、长度和横截面积。当发生机械变形时,这些量(ρ,l,A)中的任何一个或全部都可能发生变化,导致电阻发生变化[图9(a)]。传感器的灵敏度或量规因数(GF)定义为GF = ΔR/(εR0),其中ΔR、R0和ε分别是电阻、初始(变形状态)电阻和应变的相对变化。在电阻型传感器中,使用低压交流(AC)信号测量阻抗,而不是使用简单的DC电阻测量,以避免产生电化学反应[239]。
基于弹性变形的离子弹性体应变传感器由于其较高的可靠性、简单的结构和简易的测量技术而具有电阻性[84,240]。电容式传感器通常不受湿度和温度的影响[240-243]。其由夹在两个电极之间的介电材料组成。电容式传感器的基本功能是电容变化C=ε0εrA/d(其中ε0、εr、A和d分别是真空的介电常数、相对介电常数、横截面积和介电层的厚度),这种变化是由于均匀应变/压力导致参数(εr,A,d)变化引起的。电容式传感器的灵敏度取GF = ΔC/(εC0),其中ΔC、C0和ε是电容、初始(变形状态)电容和应变的相对变化[图9(b)]。传感器技术中的另一个重要术语是迟滞,其表示可重复性。为定量比较迟滞幅度,将迟滞程度(DH)[45]定义为DH = (AS-AR)/AS× 100%,其中AS和AR分别是相对电阻(电容)与应变关系图中弹性曲线和应变释放曲线的面积。电容式传感器的优点是灵敏度高、迟滞低、功耗低[80,244-246]。另一方面,电阻型传感器具有易于制造、成本低、易于信号采集和检测范围宽的优点[244,247,248]。

图9. 离子弹性体传感器转导机制示意图。(a)电阻型传感器受到压力或产生应变时,其电阻的变化;(b)电容式传感器中受到压力或产生应变时,其电容的变化;(c)由于不同尺寸的离子分离,弯曲时产生电压(电流)的示意图。
通常在挠曲离子效应[70,249-251]的基础上用离子弹性体检测弯曲变形,由此在弹性体[如聚乙二醇二丙烯酸酯(PEGDA)]基质中使用不同大小的阳离子(通常较大)和阴离子(通常较小)。在弯曲聚合物薄膜时,由于阳极和阴极的体积不对称,阳离子和阴离子被迫分离,从而产生电位差,如图9(c)所示。这种效应与第2节中描述的基于不同尺寸离子的弯曲驱动相反。弯曲感应电流或电压与弯曲角度成正比。这种方法对弯曲方向敏感,是此类传感器的主要优点。此外,这种装置可用于微型发电[71,252]。
离子弹性体很少被用作剪切传感器[253,254],大多数传感研究都集中在均匀应变和弯曲应变传感方面。
图10列出了最常用于离子型弹性体传感器的弹性体和ⅠL,图1中尚未将其列为致动器材料。
3.1. 应变传感器
为开发可用于各种应用的离子应变传感器,目前研究人员已提出多种弹性体材料、离子实体和制造方法。Xie等[255]已证明混合有ⅠL乙基铵(EAN)的功能化普朗尼克嵌段共聚物可分级自组装成为面心立方结构,如图11(a)所示。连接自组装胶束的长聚合物链可实现高拉伸性(3000%应变下断裂)、良好的循环稳定性以及与电阻和应变的线性关系[255,256]。小角度X射线散射(SAXS)表明单轴拉伸过程中的两个阶段的微结构转变[图11(b)][256]。通过实验可知,上述传感器不会出现微观裂纹和破损,具有很高的耐用性[220,257,258]。
导电水凝胶(通常称为“离子水凝胶”)和离子凝胶是其他类型的软弹性材料,由于其独特的性质,其被用于传感器制造中。导电水凝胶是含有导电材料的水膨胀聚合物网络[259](主要是溶剂化盐[260,261]),而离子凝胶是与ⅠL混合的聚合物基质[262-267]。大多数水凝胶可与离子凝胶生物相容,可制成比组织更软的材料,这一特性在柔性传感器的应用中很重要,可避免限制身体活动。离子凝胶是非挥发性的,比水凝胶更适合室外应用(水凝胶由于水分蒸发而易变干)。为抑制水凝胶脱水,研究人员使用聚二甲基硅氧烷(PDMS)对其进行封装。聚丙烯酰胺(PAM)是一种广泛用于基于水凝胶的应变传感器的弹性材料[51,78,91]。吸湿盐(主要成分为LiCl和NaCl)可用于导电元件,因为其通过吸水和保持相对湿度恒定能提高水凝胶的稳定性[78]。Gu等[51]研发了一种高应变(约300%应变)和高透明度(约95%可见光透射率)的水凝胶弹性体离子传感器,这种传感器不仅可监测手指运动,还可识别手势和手语。
基于Ⅰonogel(分散在ⅠL中的rGO)的3D打印应变传感器具有350%的应变范围、小于3.5%的迟滞程度以及良好的复现性(5000次循环)[268]。rGO的加入使电导率增加了45%,从而提高了传感器的灵敏度。使用银片/Ecoflex制作的印刷电极可提高系统的柔性。表5 [51, 70,71,77,78,81,91,239,252,255,256,268,269]总结了常用的应变传感器的基本特性以及附加信息,如制造技术。

表5 常见应变传感器的基本特性
3.2. 压力传感器
在许多应用领域中,压力传感都是非常关键的技术,如在诊断心力衰竭、呼吸障碍、心血管疾病和运动损伤领域[4]。在不同的身体活动中,人体的不同部位会产生不同程度的压力。体内压力如眼内压和颅内压属于低压(< 10 kPa)[4];心脏、颈静脉脉搏、血压等属于中压(< 100 kPa)[4,270]。由于体重和大范围身体运动施加在脚部的压力可视为高压(> 100 kPa)[4,270]。为监测这些不同范围的压力,需要高灵敏度和易产生弹性变形的压力传感器。图案化微结构[271,272]、多孔结构[273,274]、纳米材料[275,276]和离子弹性体都适合作为高灵敏度压力传感器。
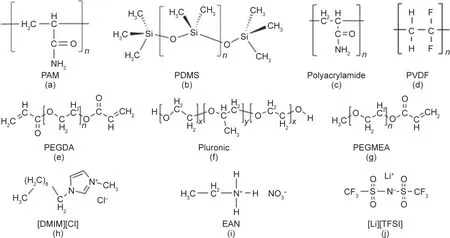
图10. 机电传感中广泛使用的弹性体[(a)~(g)]和ⅠL [(h)~(j)]的分子结构。PAM:聚丙烯酰胺;PDMS:聚二甲基硅氧烷;PEGMEA:聚乙二醇甲醚丙烯酸酯;[DMⅠM][Cl]:1-癸基-3-甲基氯化咪唑鎓;EAN:乙基硝酸铵;[Li][TFSⅠ]:双(三氟甲磺酰基)酰亚胺锂。
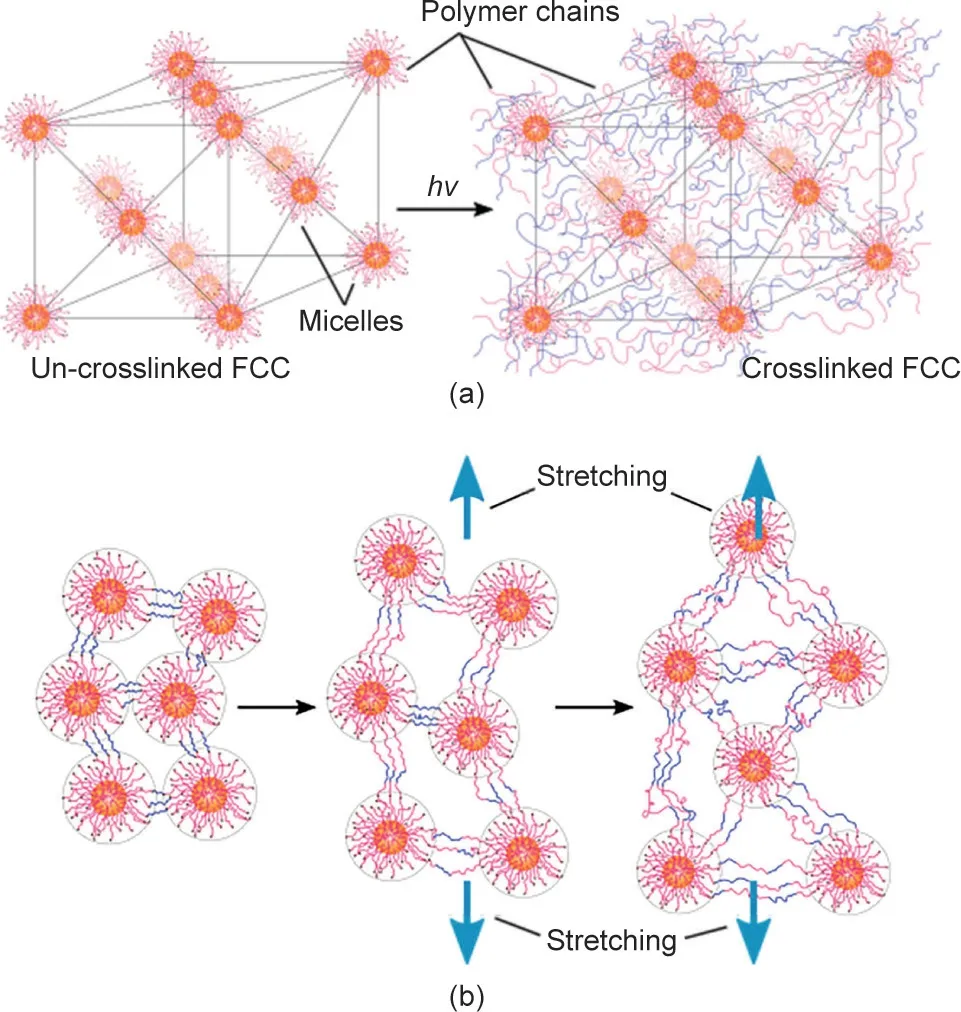
图11. 普朗尼克嵌段共聚物结构和传感机制的说明。(a)存在ⅠL EAN时的自组装面心立方结构(FCC);(b)单轴拉伸时的两个阶段的微观结构转变。(a)经National Academy of Ⅰnventors许可,转载自参考文献 [255],©2018;(b)经American Chemical Society许可,转载自参考文献 [256],©2018。
无溶剂离子弹性体材料在可穿戴电子产品领域具有巨大的潜力,因为它们在环境空气化学性质稳定,并且随着重量损失(可忽略不计)或衰减仍保持最初的弹性变形、透明度和导电性[277]。各研究团队已研发出用于压力传感的无溶剂ⅠL或离子盐聚合物复合材料[277-280]。Shi等[277]展示了一种非常稳定(对空气、温度、附着力和电压)的离子导电弹性体,由双三氟甲烷磺酰亚胺锂(LiTFSⅠ)、PEGDA和丙烯酸丁酯(BA)组成。研究人员发现电解质和金属电极界面比水凝胶-金属界面的腐蚀性小得多。此外,在系统中加入共聚单体可提高传感器的电导率,从而提高压力传感器的灵敏度。聚合度和交联度、离子实体的浓度和活性材料的尺寸都极大地影响了传感器的灵敏度[278,279]。
除在应变传感方面的应用,离子水凝胶还可用于压力传感[82,267,281,282]。Darabi等[82]研发了超弹性变形(1500%)的离子水凝胶,增强了传感器的灵敏度和机械性能。基于PPA的水凝胶和三价铁离子的离子弹性压力传感器,可测量0~0.45 kPa的压力,适用于体内压力测量。研究人员对不同弹性变形(25%和50%应变)进行重复压缩实验,该实验证明了此传感器具有多功能性。通过使用带有水凝胶的气动软管,该传感器可测量气动力和压缩力,如指压[267]。由于其具有光学透明性和弹性变形能力,离子水凝胶也经常用于传感器的电极中[282]。
微结构{如中间脊[图12(a)]}在人体皮肤中是必不可少的,其可增强机械刺激下的敏感性[94]。研究人员对应用于人体皮肤的离子弹性压力传感器展开了多项研究[90,283-285]。微图案技术使超灵敏压力检测具有快速响应和低功耗特点。研究人员已构建了不同的微结构形状,如金字塔形[90,285]、圆锥形[283]和球帽形[284]。当这些图案化的离子弹性体(主要为离子凝胶)夹在两个电极之间时,就会产生周期性的气隙。当施加压力时,这些气隙减小,导致传感器的有效电容大幅增加,从而导致超灵敏度。PVDF-co-HFP凝胶与EMⅠ-TFSⅠ混合[图1(e)]后具有高电容和高抗拉强度,可被作为一种广泛使用的微图案压力传感器传感材料。Cho等[285]将有无微结构情况下的传感器的灵敏度进行了比较。基于平面型离子凝胶的压力传感器比金字塔形的压力传感器高一个数量级,实验表明由压力控制电容可使压力传感器灵敏度提高。研究人员还随机分布不同尺寸的微结构进一步提高了灵敏度[284]。
除检测压力外,研究人员还通过金字塔栓结构的传感器实现了剪切力和扭转力的测量[90]。多数情况下需要采用昂贵的光刻技术制造上述微结构,为解决这个问题,Qiu等[283]提出了用软光刻技术从Calathea zebrine叶中模印得到微结构的方法。

图12. 生物启发的传感器。(a)人类皮肤和中脊;(b)皮肤通过压电通道将离子压入梅克尔细胞从而感知压力的过程(P1和P2是被两种不同量级的压力激活的两点);(c)具有对弯曲压力敏感的离子通道的生物细胞图示(左)和生物激发压力传感器图示(右)。(b)经Wiley-VCH Verlag GmbH & Co. KGaA许可,转载自参考文献[286],©2017;(c)经American Chemical Society许可,转载自参考文献[287],©2016。
研究人员受细胞膜中通过纳米多孔离子通道传输离子的启发,已研发出在大压力范围内具有高灵敏度和稳定性的传感器[286,287]。如图12(b)所示,Piezo2蛋白包含机械激活的离子纳米通道,可以实施梅克尔细胞的机械转导[288,289]。Jin等[286]采用这种机制研发了一种针对极低压力(10~100 Pa)测量的压力传感器,如鹅毛施加在表面上的压力、耳语的声压或动脉压力波的压力。生物质膜的离子通道启发了研究人员对压力传感器的研发,该压力传感器具有极短的响应时间(约12 ms)[287]。目前,皮肤启发[图12(c)]的基于离子弹性体的压力传感器由于其独特的生物相容性而获得了大量关注,其传感机制源于外部刺激下的离子传输。
表6 [90,261,267,282-287]和表7 [82,90,277-281]分别列出了各类电阻和电容式离子弹性压力传感器的材料特性、制造技术和性能。
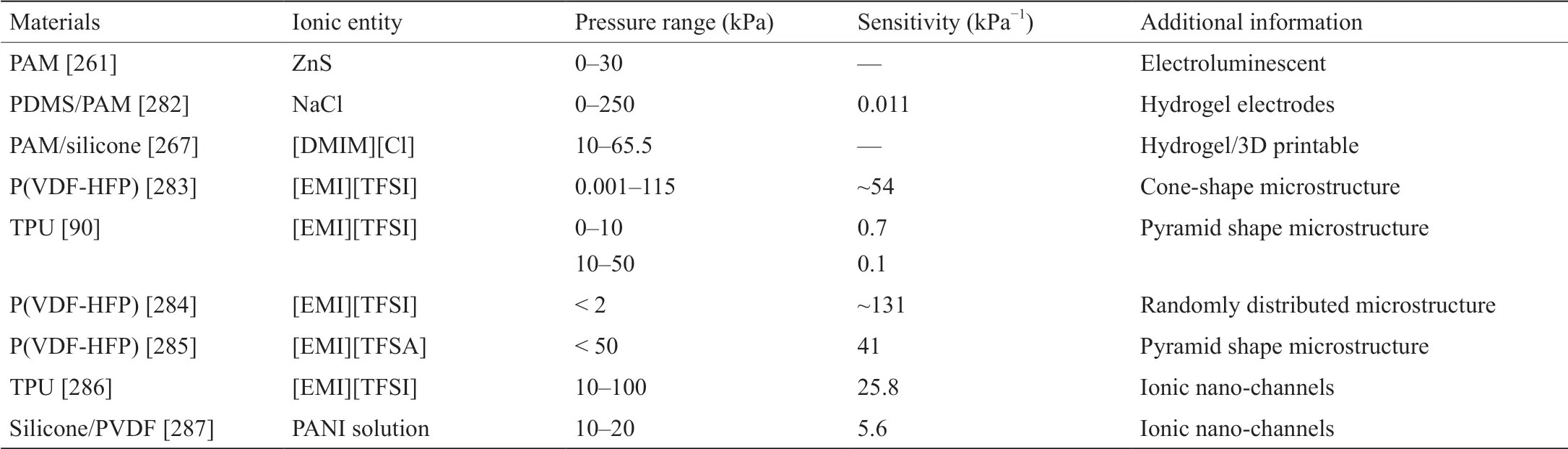
表6 电容式压力传感器的基本特性(传感器的独特材料和结构特性列于最后一栏)
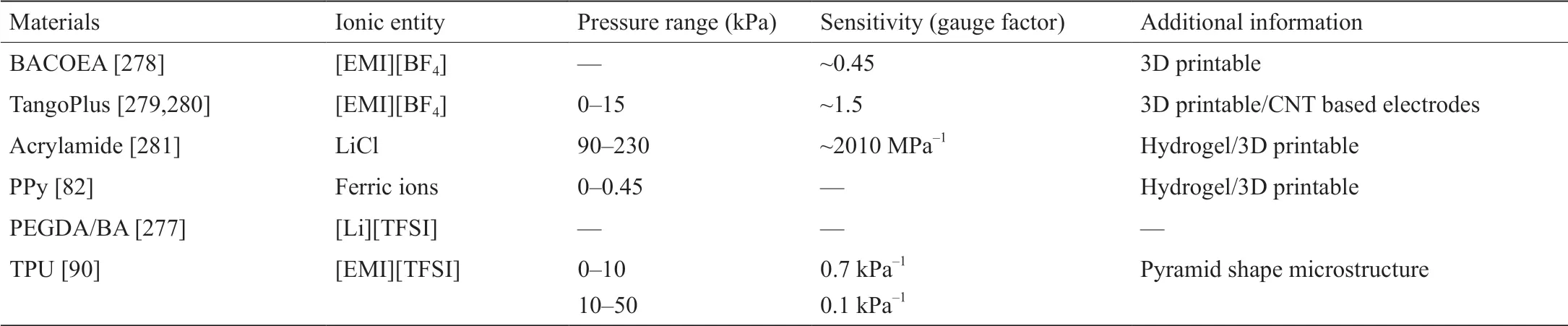
表7 电阻式压力传感器的基本特性(传感器的某些独特材料和结构特性列于最后一栏)
3.3. 展望
在过去的几十年里,受自然界中柔性结构的驱动机制的启发,柔性机器人技术得到了蓬勃发展[214,290-294]。与传统的硬性机器人在离散运动中的自由度有限不同,使用刺激响应弹性材料的柔性机器人可产生连续的形状变形且不会损坏其有效载荷[295-297]。柔性弹性、对外部约束的良好适应性以及安全性使得柔性机器人在医疗保健和人工智能领域具有潜在的应用价值[298-300]。要实现柔性机器人应用,需要开发具有弹性的柔性材料,从而可在多次循环后仍能实现重复驱动和传感。
尽管离子弹性机电传感器在过去十年中取得了重大进展,但其仍处于初期阶段,仍存在重大挑战。因此,我们需要进一步研发。研究人员需聚焦于新材料和不同的制造工艺以解决存在的问题,如优化精度、功耗、灵敏度、可靠性、兼容性和可重复性。如上所述,表面微结构和基于生物启发的具有离子通道的弹性体可提高传感器的性能。
高灵敏度、可弹性变形、耐用性和准确性以及快速响应能力、生物相容性和低成本,是未来可穿戴式应变传感器在生物力学捕捉、运动性能跟踪、柔性机器人反馈和康复监测应用中需要达到的目标[4,51,256,301-303]。在这些应用中,需要同时检测大范围运动(如手、腿、脖子、手指、脊柱的拉伸、扭转和弯曲运动)和小范围运动(如心跳、脉搏、面部表情、呼吸、吞咽、眨眼和说话)[80,304-306]。
我们认为设计一个具有空间变化构型的内部弹性体结构可有助于实现更多样的机电传感器。为此,具有不同结构(即平面、混合、垂直和各向同性)的iLCE都具有极大的潜力,如图8(a)~(d)所示。在图13(a)中,用弯曲曲率的函数表示挠曲离子极化(图8中的电致动逆效应)。与电致动类似,挠曲极化与在交联阶段预编程的结构有关。从iLCE中获得的挠曲离子系数(极化曲线与曲率曲线的斜率)与已成熟的电活性聚合物(EAP)的挠曲离子系数相当[70,71,252]。此外,iLCE还提供了调节器件灵敏度的额外自由度。然而,需要采用先进的电流测量技术实现低输出电流(微安级),如锁定放大器。如图13(b)所示,当将iLCE集成到OECT中,可显著放大信号并获得先进的弯曲传感器。当发生弯曲时,该器件将离子驱动到源极和漏极之间的PEDOT:PSS层内。这可以调节该层的导电性,从而使电流从源极流向漏极,这初步证明了这一原理的可行性。iLCE也可以用作栅极电解质,其通过不同的排列提供额外的自由度,从而优化系统。将离子电活聚合物和iLCE与OECT结合,可以放大挠曲离子电流,从而获得高灵敏度,这为应变传感器领域提供了新的方向。这种传感器易于与其他传感机制结合(可穿戴设备的主要要求),如电化学传感器和气体传感器。

图13. 在各种排列(平面、垂直和混合)中使用iLCE的初步结果。(a)弯曲曲率作用下的挠曲离子极化;(b)基于iLCE的OECT原理示意图。
4. 总结
本文综述了离子弹性体作为传感器和致动器的最新进展。对近期结果的总结和对前景的讨论清楚地表明,未来的致动器和传感器不仅必须协同工作,而且还必须通过根据过去的致动和传感技术改变其特性实现自适应。这些复杂系统需要能在更长的时间尺度上发挥作用,甚至能实现自修复。图14说明了这种协同作用(图形化摘要),其总结了将集成到未来柔性机器人中的最新和未来离子弹性体致动器和传感器的本质。
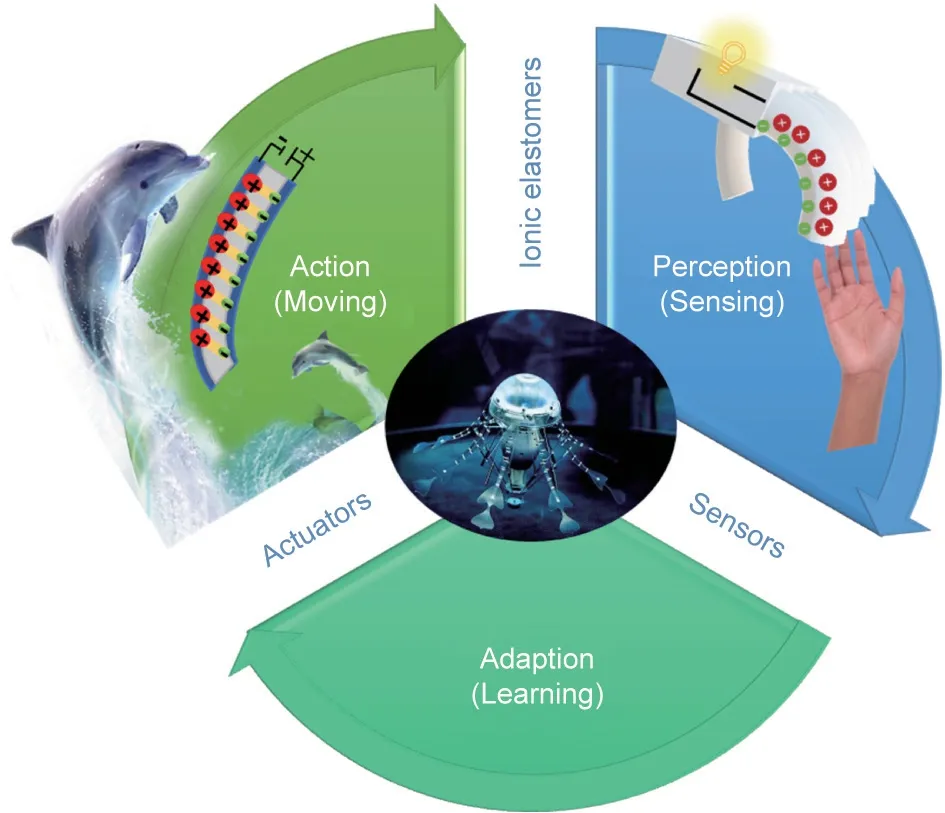
图14. 未来致动器和传感器的协同作用,其不仅必须在柔性机器人中协同工作,还必须根据过去的驱动和传感技术,通过改变其特性来实现自适应。
Acknowledgement
This work was supported by the National Science Foundation (DMR-1904167).
Compliance with ethics guidelines
Chenrun Feng, C.P. Hemantha Rajapaksha, and Antal Jákli declare that they have no conflict of interest or financial conflicts to disclose.
猜你喜欢
弹性体(2021年6期)2021-02-14 05:39:00
科技风(2018年31期)2018-07-09 12:46:38
材料科学与工程学报(2016年1期)2017-01-15 13:34:10
光学精密工程(2016年6期)2016-11-07 09:07:41
光学精密工程(2016年5期)2016-11-07 09:06:31
中国资源综合利用(2016年4期)2016-01-22 08:27:22
广州大学学报(自然科学版)(2015年4期)2015-12-23 11:50:10
电源技术(2015年2期)2015-08-22 11:28:02
橡胶工业(2015年3期)2015-07-29 08:24:16
河北工业大学学报(2014年2期)2014-09-17 00:55:12